







星期四是最不喜欢的一天,因为要有三节课要上,还有一个尴尬的问题:早上在8楼碰到了一个让我心潮澎湃的童鞋,然而.....额太尴尬不写了!!!所以好难过的样子。。
第三天 看了两集视频, 掌握了USART 模块的设置: 需要设置UE位使能、M位来定义字长、停止位的位数、TE位、BRR寄存器选择所要求的波特率,但是在搞什么USART->BRR的波特率的时候遇到了一个让我百思不得其解的问题,所以到了这个时候才来写的总结。(到现在还是不理解)。代码跟视频上的是一模一样的说,但是为什么执行的效果观察确是不一样的呢。我的代码只要一设置USART->BRR的值,那就只能发送一次的数据,只要不设置USART->BRR,那就能无限次发送,但是寄存器内容很捉鸡,如下:
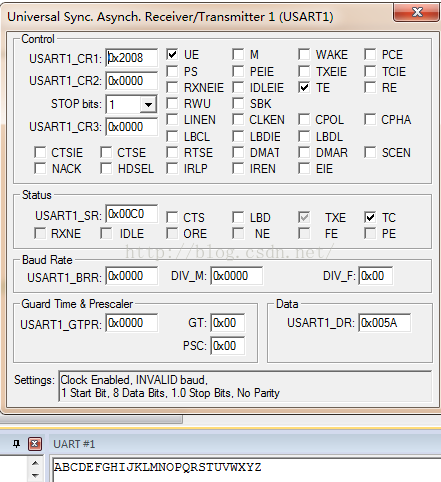

代码真的是一模一样的:
#include "stm32f10x.h"
#include <stdio.h>
#define PA1 GPIOA->BSRR
#define PA0 GPIOA->BRR
#define GPIOA_ODR_A (GPIOA_BASE + 0x0C) //端口对应寄存器等于端口基加上对应便宜地址
#define GPIOA_IDR_A (GPIOA_BASE + 0x08)
#define GPIOB_ODR_A (GPIOB_BASE + 0x0C)
#define GPIOB_IDR_A (GPIOB_BASE + 0x08)
#define GPIOC_ODR_A (GPIOC_BASE + 0x0C)
#define GPIOC_IDR_A (GPIOC_BASE + 0x08)
#define GPIOD_ODR_A (GPIOD_BASE + 0x0C)
#define GPIOD_IDR_A (GPIOD_BASE + 0x08)
#define GPIOE_ODR_A (GPIOE_BASE + 0x0C)
#define GPIOE_IDR_A (GPIOE_BASE + 0x08)
#define BitBand(Addr, BitNum) *((volatile unsigned long *)((Addr & 0xF0000000) + 0x2000000 + ((Addr & 0xfffff) << 5) + (BitNum << 2))) //转位操作公式
#define PAout(n) BitBand(GPIOA_ODR_A, n)
#define PAin(n) BitBand(GPIOA_IDR_A, n)
#define PBout(n) BitBand(GPIOB_ODR_A, n)
#define PBin(n) BitBand(GPIOB_IDR_A, n)1
#define PCout(n) BitBand(GPIOC_ODR_A, n)
#define PCin(n) BitBand(GPIOC_IDR_A, n)
#define PDout(n) BitBand(GPIOD_ODR_A, n)
#define PDin(n) BitBand(GPIOD_IDR_A, n)
#define PEout(n) BitBand(GPIOE_ODR_A, n)
#define PEin(n) BitBand(GPIOE_IDR_A, n)
void Delay_MS(u16 dly)
{
u16 i, j;
for (i = 0; i < dly; i++)
for (j = 1000; j > 0; j--)
;
}
void GPIO_Configuration(void);
void RCC_Configuration(void);
int main(void)
{
float Div;
u16 M, F, BRR;
u32 Bound;
u8 data = 'A';
RCC_Configuration();
GPIO_Configuration();
//USART 模块的设置: UE位使能、M位来定义字长、停止位的位数、TE位、BRR寄存器选择所要求的波特率
USART1->CR1 |= (1 << 13);
USART1->CR1 &= ~(1 << 12);
USART1->CR2 &= ~(3 << 12);
USART1->CR1 |= (1<<3);
//.......
/*9600 = 72*1000*1000/(16 * U)
*U = 72000000/(9600*16) = 468.75
*波特率整数部分可以直接写, 小数部分有公式
*M = 468
*F = (0.75) * 16 = 12 = 0x0C
*/
USART1->BRR = 7500; //*****问题的所在地
//发送26字母 到USART1的TXD
for (F = 0; F < 26; F++)
{
while (USART1 -> SR & (1 << 7) == 0); //判断寄存器空吗?
USART1->DR = data;
data++;
}
}
void GPIO_Configuration()
{
GPIO_InitTypeDef GPIO_InitStructure;
/*Configure USARTx_Tx as alternate function push-pull */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* Configure USARTx_Rx as input floating */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
}
void RCC_Configuration()
{
//---------使用外部RC晶振---------
RCC_DeInit(); //初始化为默认值
RCC_HSEConfig(RCC_HSE_ON); //使能外部的高速时钟
while (RCC_GetFlagStatus(RCC_FLAG_HSERDY) == RESET); //等待外部高速时钟使能就绪
//FLASH_PrefetchBufferCmd(FLASH_PrefetchBuffer_Enable); //Enable Prefetch Buffer
//FLASH_SetLatency(FLASH_Latency_2); //Flash 2 wait state
RCC_HCLKConfig(RCC_SYSCLK_Div1); //HCLK = SYSCLK
RCC_PCLK2Config(RCC_HCLK_Div1); //PCLK2 = HCLK
RCC_PCLK1Config(RCC_HCLK_Div2); //PCLK1 = HCLK/2
RCC_PLLConfig(RCC_PLLSource_HSE_Div1, RCC_PLLMul_9); //PLLCLK = 8MHZ * 9 = 72MHZ
RCC_PLLCmd(ENABLE); //Enable PLLCLK
while (RCC_GetFlagStatus(RCC_FLAG_PLLRDY) == RESET); //Wait till PLLCLK is ready
RCC_SYSCLKConfig(RCC_SYSCLKSource_PLLCLK); //Select PLL as system clock
while(RCC_GetSYSCLKSource() != 0x08); //Wait till PLL is used as system clock source
//---------打开相应外设时钟-------------------
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //使能APB2外设的GPIOA的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE); //使能APB2外设的GPIOC的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE); //..............AFIO.......
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE); //..............USART1.....
//GPIO_PinRemapConfig(GPIO_Remap_USART1, ENABLE)
}













 3461
3461











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









