









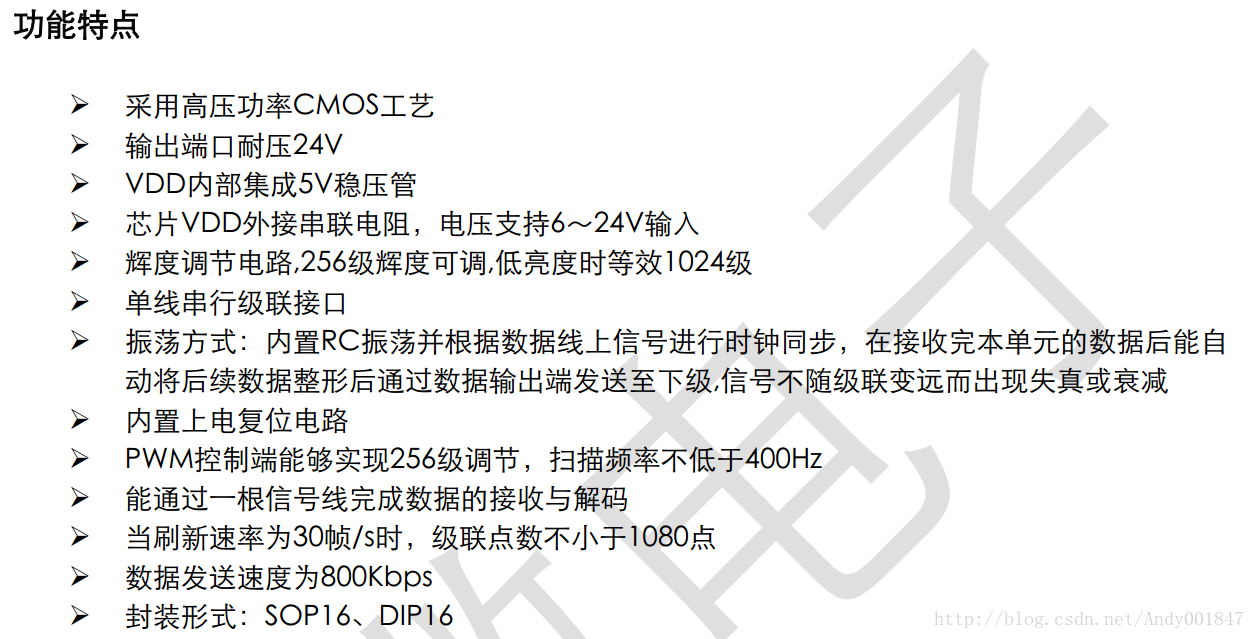
TM1812芯片的特性如下:
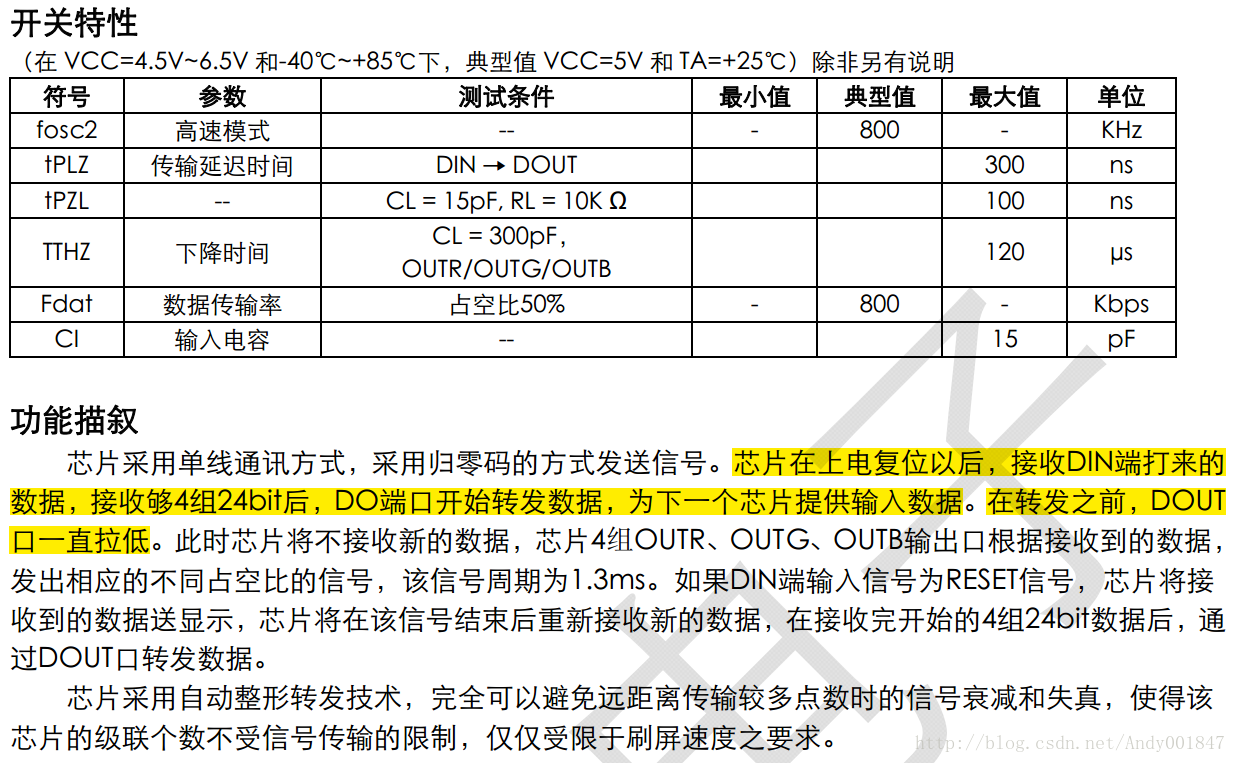
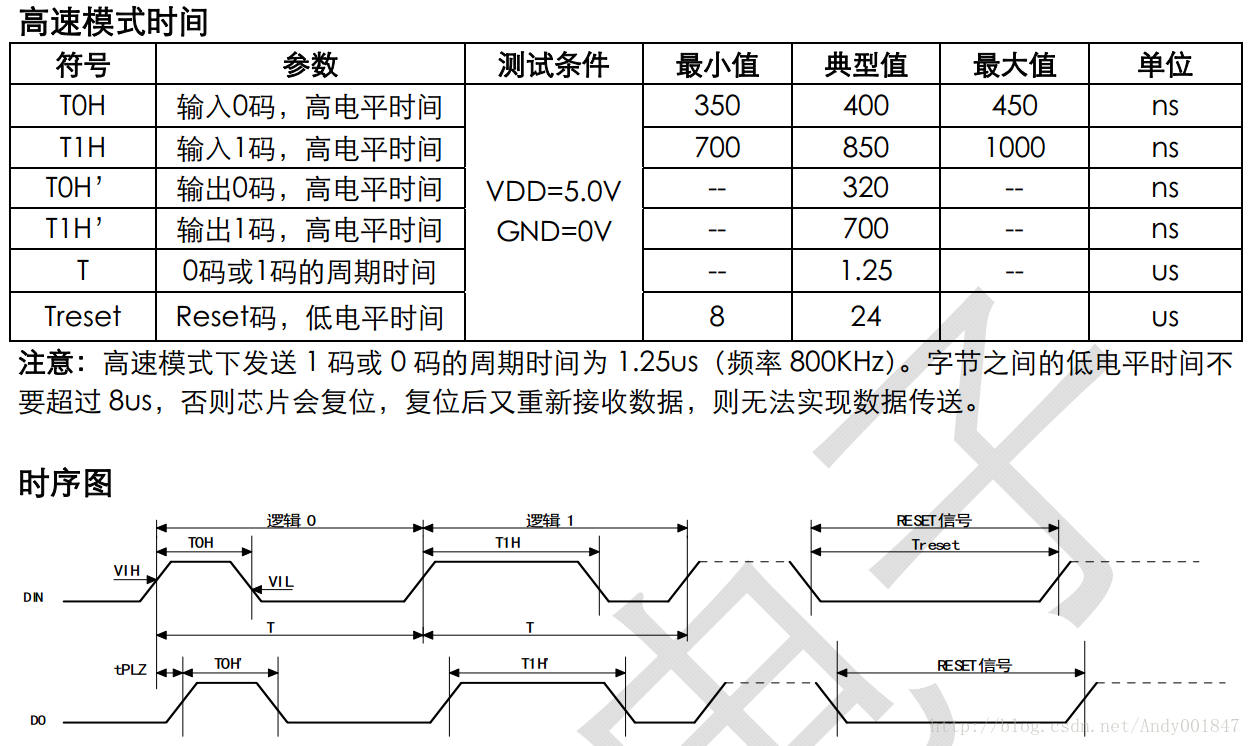
数据传输参数及时序:
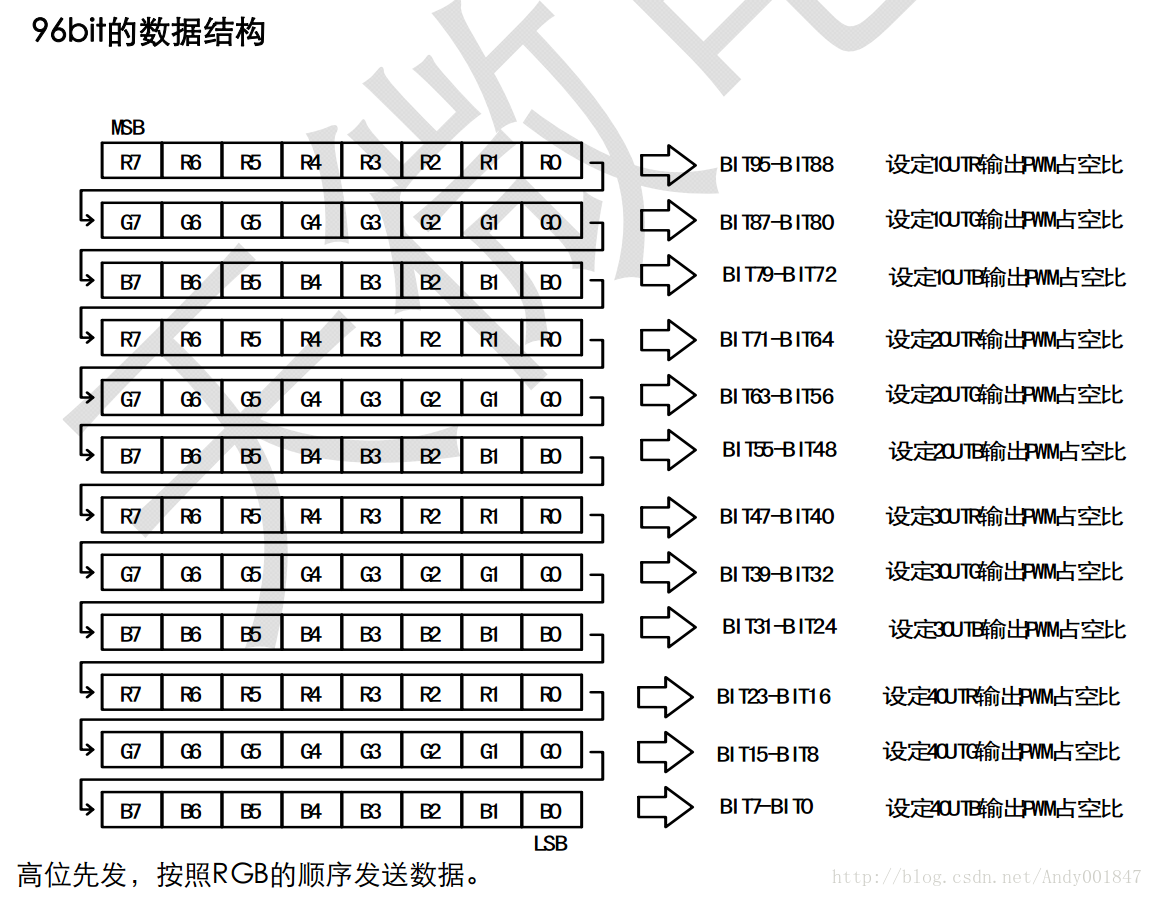
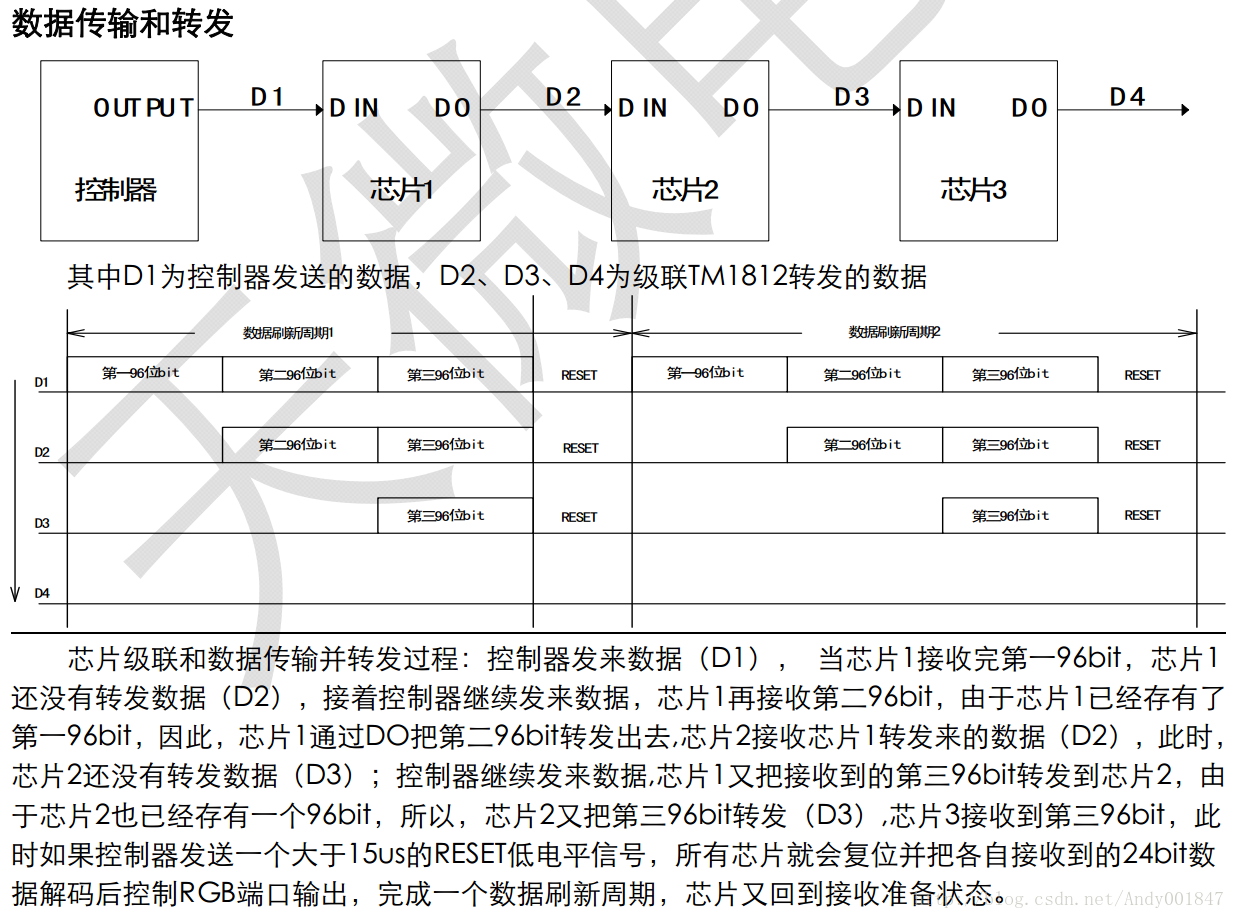
在上图中一个串联了三个TM1812芯片,每个芯片控制四盏灯,每盏灯有R,G,B三种颜色,每种颜色有256(0xFF)阶灰度可调,及每个颜色用一个字节控制。发送完全部LED灯的数据后,发送RESET信号进行LED显示以及重新接收数据。
下面是我在STM32F030C8T6中的驱动,时钟频率48MHz。
tm1812.h的代码:
#ifndef __LED_TM1812_H__
#define __LED_TM1812_H__ /* Define macro __LED_TM1812_H__ */
#ifdef __cplusplus
extern "C"{
#endif
#include <stdint.h>
#define TM1812_CHIP_NUMBER (8) /* TM1812 chip number */
#define ONE_RESOLUTION_SIZE (TM1812_CHIP_NUMBER*4*3) /* A row RGB LED bytes size, a TM1812 chip control 4 LEDs, a LED contain 3 bytes(R,G,B)*/
/* Data input channel */
typedef enum
{
DIN1,
DIN2,
DIN3,
DIN4,
}DIN_t;
/* Unipolar Return-to-zero code default low level, code 1, 1.25us */
#define DIN_BIT_1(GPIO_Type, GPIO_Pin) do \
{ \
GPIO_Type->BSRR = GPIO_Pin; \
__NOP();__NOP();__NOP();__NOP(); \
__NOP();__NOP();__NOP();__NOP(); \
__NOP();__NOP();__NOP();__NOP(); \
__NOP();__NOP();__NOP();__NOP(); \
__NOP();__NOP();__NOP();__NOP(); \
__NOP();__NOP();__NOP();__NOP(); \
__NOP();__NOP();__NOP();__NOP(); \
__NOP();__NOP();__NOP();__NOP(); \
__NOP();__NOP();__NOP();__NOP(); \
__NOP();__NOP(); \
GPIO_Type->BRR = GPIO_Pin; \
__NOP();__NOP();__NOP(); \
}while(0)
/* Unipolar Return-to-zero code default low level, code 0, 1.25us */
#define DIN_BIT_0(GPIO_Type, GPIO_Pin) do \
{ \
GPIO_Type->BSRR = GPIO_Pin; \
__NOP();__NOP();__NOP();__NOP(); \
__NOP();__NOP();__NOP();__NOP(); \
__NOP();__NOP();__NOP();__NOP(); \
__NOP();__NOP(); \
GPIO_Type->BRR = GPIO_Pin; \
__NOP();__NOP();__NOP();__NOP(); \
__NOP();__NOP();__NOP();__NOP(); \
__NOP();__NOP();__NOP();__NOP(); \
__NOP();__NOP();__NOP();__NOP(); \
__NOP();__NOP();__NOP();__NOP(); \
__NOP();__NOP();__NOP();__NOP(); \
__NOP();__NOP();__NOP();__NOP(); \
__NOP(); \
}while(0)
void TM1812_LEDInit(void);
void TM1812_DataPowerOn(void);
void TM1812_DataPoweOff(void);
int TM1812_WriteOneByte(DIN_t Din, uint8_t Data);
int TM1812_Reset(DIN_t Din);
int TM1812_TransmitData(DIN_t Din, const uint8_t* Data, uint32_t Size);
void TM1812_Test(void);
#ifdef __cplusplus
}
#endif
#endif /* End define macro __LED_TM1812_H__ */tm1812.c代码:
#include "stm32f0xx_hal.h"
#include "led_tm1812.h"
#include "usart.h"
#include <string.h>
#include "cmsis_os.h"
#include <stdbool.h>
/*
** @Brief: execute nCount no operation, delay a short time
** @Parameters: us, delay us
** @Return: None
**/
static void DelayUs(uint32_t nUs)
{
uint32_t Index = 0;
uint32_t TmpIndex = 0;
for(Index = 0; Index < nUs; Index++)
{
for(TmpIndex = 0; TmpIndex < 7; TmpIndex++)
{
__NOP();
}
}
}
/*
** @Brief: Init RGBLED tm1812 relative pins
** @Parameters: None
** @Return: None
**/
void TM1812_LEDInit(void)
{
/*
* DIN1 ---> PB4 (Output)
* DIN2 ---> PB5 (Output)
* DIN3 ---> PB10 (Output)
* DIN4 ---> PB2 (Output)
* LED_EN1 ---> PB6 (Output)
*/
GPIO_InitTypeDef GPIO_InitStruct;
/* GPIO Clock Enable */
__HAL_RCC_GPIOB_CLK_ENABLE();
/*Configure GPIO pins : PB2 PB10 PB4 PB5 */
GPIO_InitStruct.Pin = GPIO_PIN_2 | GPIO_PIN_10 | GPIO_PIN_4 | GPIO_PIN_5;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_PULLDOWN;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/*Configure GPIO pins : PB6 */
GPIO_InitStruct.Pin = GPIO_PIN_6;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/* Configure GPIO pin default Output Level */
/* DIN1, DIN2, DIN3, DIN4 default is low level */
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_2 | GPIO_PIN_4 | GPIO_PIN_5 | GPIO_PIN_10, GPIO_PIN_RESET);
/* Power off TM1812 */
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_RESET);
}
/*
** @Brief: Enable data input
** @Parameter: None
** @Return: None
**/
void TM1812_PowerOn(void)
{
/*
* LED_EN1 ---> PB6 (Output)
*/
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_SET);
}
/*
** @Brief: Disable data input
** @Parameter: None
** @Return: None
**/
void TM1812_PowerOff(void)
{
/*
* LED_EN1 ---> PB6 (Output)
*/
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_RESET);
}
/*
** @Brief: Data transmit is used unipolar return to zero code
** @Parameter: 1) Din, select data input port
2) Data, one byte data that would be transmitted
** @Return: 1) 0, transmit successful
2) -1, data input port error
**/
int TM1812_WriteOneByte(DIN_t Din, uint8_t Data)
{
int BitIndex = 0;
switch(Din)
{
case DIN1:
for(BitIndex = 8*sizeof(Data)-1; BitIndex >= 0; BitIndex--)
{
if(Data & (0x01 << BitIndex))
{
DIN_BIT_1(GPIOB, GPIO_PIN_4);
}
else
{
DIN_BIT_0(GPIOB, GPIO_PIN_4);
}
}
break;
case DIN2:
for(BitIndex = 8*sizeof(Data)-1; BitIndex >= 0; BitIndex--)
{
if(Data & (0x01 << BitIndex))
{
DIN_BIT_1(GPIOB, GPIO_PIN_5);
}
else
{
DIN_BIT_0(GPIOB, GPIO_PIN_5);
}
}
break;
case DIN3:
for(BitIndex = 8*sizeof(Data)-1; BitIndex >= 0; BitIndex--)
{
if(Data & (0x01 << BitIndex))
{
DIN_BIT_1(GPIOB, GPIO_PIN_10);
}
else
{
DIN_BIT_0(GPIOB, GPIO_PIN_10);
}
}
break;
case DIN4:
for(BitIndex = 8*sizeof(Data)-1; BitIndex >= 0; BitIndex--)
{
if(Data & (0x01 << BitIndex))
{
DIN_BIT_1(GPIOB, GPIO_PIN_2);
}
else
{
DIN_BIT_0(GPIOB, GPIO_PIN_2);
}
}
break;
default:
return -1;
}
return 0;
}
/*
** @Brief: Send a reset signal
** @Parameter: Din, select data input port
** @Return: 1) 0, send a reset signal successful
2) -1, data input port error
**/
int TM1812_Reset(DIN_t Din)
{
switch(Din)
{
case DIN1:
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_4, GPIO_PIN_RESET);
DelayUs(24);
break;
case DIN2:
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_5, GPIO_PIN_RESET);
DelayUs(24);
break;
case DIN3:
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_10, GPIO_PIN_RESET);
DelayUs(24);
break;
case DIN4:
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_2, GPIO_PIN_RESET);
DelayUs(24);
break;
default:
return -1;
}
return 0;
}
/*
** @Brief: Transmit LED data
** @Parameter: 1) Din, data input port
2) Data, transmit data
3) Size, data size
** @Return: 1) 0, transmit data successful
2) -1, data is null or data size illegal
**/
int TM1812_TransmitData(DIN_t Din, const uint8_t* Data, uint32_t Size)
{
int ByteIndex = 0;
if((NULL == Data) || (Size != ONE_RESOLUTION_SIZE))
{
return -1;
}
/* Disable all maskable interrupts */
taskDISABLE_INTERRUPTS();
for(ByteIndex = 0; ByteIndex < Size; ByteIndex++)
{
TM1812_WriteOneByte(Din, Data[ByteIndex]);
}
/* Enable microcontroller interrupts */
taskENABLE_INTERRUPTS();
TM1812_Reset(Din);
return 0;
}
/*
** Brief: Test Led only
**/
void TM1812_Test(void)
{
uint8_t Data[ONE_RESOLUTION_SIZE] = {0};
uint32_t DataSize = sizeof(Data) / sizeof(Data[0]);
int DataIndex = 0;
static int ColorFlag = 1;
if(ColorFlag > 3)
{
ColorFlag = 1;
}
memset(Data, 0, DataSize);
for(DataIndex = 0; DataIndex < DataSize; DataIndex++)
{
if(1 == ColorFlag) /* Red */
{
if(((DataIndex+1) % 3) != 1)
{
Data[DataIndex] = 0x00;
}
else
{
Data[DataIndex] = 0xFF;
}
}
else if(2 == ColorFlag) /* Green */
{
if(((DataIndex+1) % 3) != 2)
{
Data[DataIndex] = 0x00;
}
else
{
Data[DataIndex] = 0xFF;
}
}
else if(3 == ColorFlag) /* Blue */
{
if(((DataIndex+1) % 3) != 0)
{
Data[DataIndex] = 0x00;
}
else
{
Data[DataIndex] = 0xFF;
}
}
TM1812_TransmitData(DIN1, Data, DataSize);
TM1812_TransmitData(DIN2, Data, DataSize);
TM1812_TransmitData(DIN3, Data, DataSize);
TM1812_TransmitData(DIN4, Data, DataSize);
}
memset(Data, 0, DataSize);
for(DataIndex = DataSize - 1; DataIndex >= 0; DataIndex--)
{
if(1 == ColorFlag) /* Red */
{
if(((DataIndex+1) % 3) != 1)
{
Data[DataIndex] = 0x00;
}
else
{
Data[DataIndex] = 0xFF;
}
}
else if(2 == ColorFlag) /* Green */
{
if(((DataIndex+1) % 3) != 2)
{
Data[DataIndex] = 0x00;
}
else
{
Data[DataIndex] = 0xFF;
}
}
else if(3 == ColorFlag) /* Blue */
{
if(((DataIndex+1) % 3) != 0)
{
Data[DataIndex] = 0x00;
}
else
{
Data[DataIndex] = 0xFF;
}
}
TM1812_TransmitData(DIN1, Data, DataSize);
TM1812_TransmitData(DIN2, Data, DataSize);
TM1812_TransmitData(DIN3, Data, DataSize);
TM1812_TransmitData(DIN4, Data, DataSize);
}
ColorFlag++;
}
说明:该驱动程序连接了四排LED,每排串联了8个TM1812芯片,故分成了四个数据通道。
总结:TM1812适合做静态光源,不适合做动态显示,动态显示会出现不同芯片数据显示不同步(断层)现象。因为TM1812数据传输采取的是单极性归零码传输,是一种单线传输,芯片之间没有时钟线进行数据同步,数据线默认状态是低电平,而且在一定时间(大于8us)内没有传输数据就会自动复位,进入重新接收数据的状态,因此刷新频率较高并且在运动时,芯片之间数据不同步现象会非常明显。














 2339
2339











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









