







Android Binder机制(三) ServiceManager守护进程
ServiceManager是用户空间的一个守护进程,它一直运行在后台。它的职责是管理Binder机制中的各个Server。当Server启动时,Server会将"Server对象的名字"连同"Server对象的信息"一起注册到ServiceManager中;而当Client需要获取Server接入点时,则通过"Server的名字"来从ServiceManager中找到对应的Server。
本文的主要内容就是对ServiceManager进行介绍,通过它的启动流程来分析它是如何成为Server管理者的。注意:本文是基于Android 4.4.2版本进行介绍的!
目录
1. ServiceManager流程图
2. ServiceManager流程详解
2.1. main()
2.2. binder_open()
2.3. open("/dev/binder")
2.4. mmap()
2.5. binder_become_context_manager()
2.6. ioctl(, BINDER_SET_CONTEXT_MGR,)
2.7. binder_loop()
2.8. for(;;)
3. ServiceManager流程总结
ServiceManager流程图
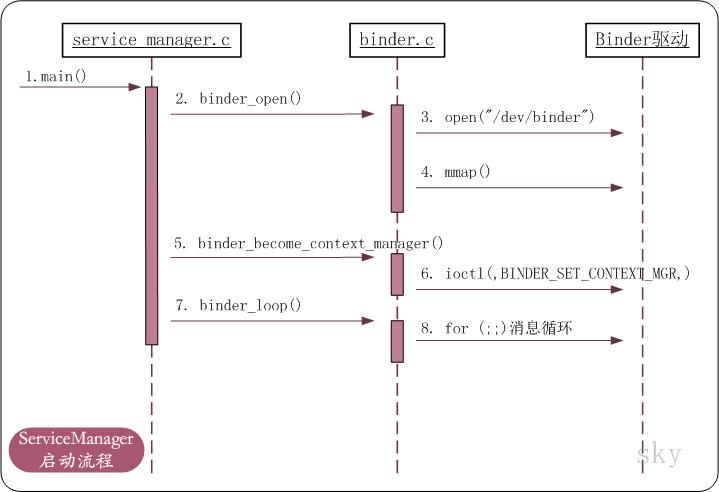
上面是ServiceManager的时序图。它启动之后,会先打开"/dev/binder"文件("/dev/binder"是Binder驱动注册的设备节点)。打开文件之后,再告诉Binder驱动,它是Binder的上下文管理者。之后,就进入到了消息循环中。进入消息循环之后,会不断的从Binder的待处理事务队列中读取事务(Binder请求或反馈),读出事务之后就进行解析,然后交给相应的进程进行处理。若没有事务,则进入等待状态,等待被唤醒。
ServiceManager流程详解
1. main()
ServiceManager是一个守护进程。它的main()函数源码如下:
int main(int argc, char **argv)
{
struct binder_state *bs;
void *svcmgr = BINDER_SERVICE_MANAGER;
bs = binder_open(128*1024);
if (binder_become_context_manager(bs)) {
ALOGE("cannot become context manager (%s)\n", strerror(errno));
return -1;
}
svcmgr_handle = svcmgr;
binder_loop(bs, svcmgr_handler);
return 0;
}
说明:该代码在frameworks/native/cmds/servicemanager/service_manager.c中。main()主要进行了三项工作:
(01) 通过binder_open()打开"/dev/binder"文件,即打开Binder设备文件。
(02) 调用binder_become_context_manager(),通过ioctl()告诉Binder驱动程序自己是Binder上下文管理者。
(03) 调用binder_loop()进入消息循环,等待Client的请求。如果没有Client请求,则进入中断等待状态;当有Client请求时,就被唤醒,然后读取并处理Client请求。
ServiceManager是如何启动的?
这里简要介绍一下ServiceManager的启动方式。当Kernel启动加载完驱动之后,会启动Android的init程序,init程序会解析init.rc,进而启动init.rc中定义的守护进程。而ServiceManager则正是通过注册在init.rc中,而被启动的。
2. binder_open()
下面,对main()的逐个步骤进行详细分析。先看看binder_open(),代码如下:
struct binder_state *binder_open(unsigned mapsize)
{
struct binder_state *bs;
bs = malloc(sizeof(*bs));
...
bs->fd = open("/dev/binder", O_RDWR);
...
bs->mapsize = mapsize;
bs->mapped = mmap(NULL, mapsize, PROT_READ, MAP_PRIVATE, bs->fd, 0);
...
return bs;
}
说明: 该代码定义在frameworks/native/cmds/servicemanager/binder.c中。binder_open的作用是打开"/dev/binder"设备文件,然后调用mmap()将设备文件"/dev/binder"映射到进程空间的起始地址。
(01) open("/dev/binder", O_RDWR)对应会调用驱动的open函数。
(02) mmap(NULL, mapsize, PROT_READ, MAP_PRIVATE, bs->fd, 0)对应会调用驱动的mmap函数。第一个参数是映射内存的起始地址,NULL代表让系统自动选定地址;mapsize大小是128*1024B,即128K;PROT_READ表示映射区域是可读的;MAP_PRIVATE表示建立一个写入时拷贝的私有映射,即,当进程中对该内存区域进行写入时,是写入到映射的拷贝中;bs->fd是"/dev/binder"句柄;而0表示偏移。
(03) binder_state结构体是来保存/dev/binder设备信息的。其中,fd是用来保存文件句柄,mmaped是映射内存的起始地址,mapsize映射内存大小。
3. open("/dev/binder")
3.1 Binder驱动注册信息
下面看看open("/dev/binder", O_RDWR)到底做了些什么。先看看下面的代码:
static const struct file_operations binder_fops = {
.owner = THIS_MODULE,
.poll = binder_poll,
.unlocked_ioctl = binder_ioctl,
.mmap = binder_mmap,
.open = binder_open,
.flush = binder_flush,
.release = binder_release,
};
static struct miscdevice binder_miscdev = {
.minor = MISC_DYNAMIC_MINOR,
.name = "binder",
.fops = &binder_fops
};
static int __init binder_init(void)
{
...
ret = misc_register(&binder_miscdev);
...
}
device_initcall(binder_init);
说明:上面是Kernel中Binder驱动代码,定义在drivers/staging/android/binder.c中。
(01) device_initcall(binder_init)的作用是将binder_init()函数注册到Kernel的初始化函数列表中。当Kernel启动后,会按照一定的次序调用初始化函数列表,也就会执行binder_init()函数;执行binder_init()时便会加载Binder驱动。
(02) binder_init()函数中会通过misc_register(&binder_miscdev)将Binder驱动注册到文件节点"/dev/binder"上。在Linux中,一切都是文件!将Binder驱动注册到文件节点上之后,就可以通过操作文件节点进而对Binder驱动进行操作。而该文件节点"/dev/binder"的设备信息是binder_miscdev这个结构体对象。
(03) binder_miscdev变量是struct miscdevice类型。minor是次设备号,这个我们不需要关心;name是Binder驱动对应在/dev虚拟文件系统下的设备节点名称,也就是/dev/binder中的"binder";fops是该设备节点的文件操作对象,它是我们需要重点关注的!fops指向binder_fops变量。
(04) binder_fops变量是struct file_operations类型。owner是标明了该文件操作变量的拥有者,就是该驱动;poll则指定了poll函数指针,当我们对/dev/binder文件节点执行poll()操作时,实际上就是调用的binder_poll()函数;同理,mmap()对应binder_mmap(),open()对应binder_open(),ioctl()对应binder_ioctl()...
3.2 Binder驱动中的binder_open()函数源码
经过上面的介绍,我们可以知道open("/dev/binder", O_RDWR)实际上是调用Binder驱动中的binder_open()函数。
static HLIST_HEAD(binder_procs);
...
static int binder_open(struct inode *nodp, struct file *filp)
{
struct binder_proc *proc;
binder_debug(BINDER_DEBUG_OPEN_CLOSE, "binder_open: %d:%d\n",
current->group_leader->pid, current->pid);
// 为proc分配内存
proc = kzalloc(sizeof(*proc), GFP_KERNEL);
if (proc == NULL)
return -ENOMEM;
get_task_struct(current);
// 将proc->tsk指向当前线程
proc->tsk = current;
// 初始化proc的待处理事务列表
INIT_LIST_HEAD(&proc->todo);
// 初始化proc的等待队列
init_waitqueue_head(&proc->wait);
// 设置proc的进程优先级为当前线程的优先级
proc->default_priority = task_nice(current);
binder_lock(__func__);
binder_stats_created(BINDER_STAT_PROC);
// 将该进程上下文信息proc保存到"全局哈希表binder_procs"中
hlist_add_head(&proc->proc_node, &binder_procs);
// 设置进程id
proc->pid = current->group_leader->pid;
INIT_LIST_HEAD(&proc->delivered_death);
// 将proc添加到私有数据中。
// 这样,mmap(),ioctl()等函数都可以通过私有数据获取到proc,即该进程的上下文信息
filp->private_data = proc;
binder_unlock(__func__);
if (binder_debugfs_dir_entry_proc) {
char strbuf[11];
snprintf(strbuf, sizeof(strbuf), "%u", proc->pid);
proc->debugfs_entry = debugfs_create_file(strbuf, S_IRUGO,
binder_debugfs_dir_entry_proc, proc, &binder_proc_fops);
}
return 0;
}
说明:binder_proc是记录进程上下文信息的结构体,它的详细介绍请参考Android Binder机制(二) Binder中的数据结构。该函数的作用如下。
(01) 创建并初始化binder_proc结构体变量proc。binder_proc是描述Binder进程的上下文信息结构体。这里,就是将ServiceManager这个进程的信息都存储到proc中。
(02) 将proc添加到全局哈希表binder_procs中。binder_procs不是我们关注的重点,也就不多说了。
(03) 将proc设为filp的私有成员。这样,在mmap(),ioctl()等函数中,我们都可以根据filp的私有成员来获取proc信息。
4. mmap()
分析完了open(),接下来看看mmap()。mmap()对应会调用Binder驱动的binder_mmap()函数。
4.1 Binder驱动中的binder_mmap()源码
static int binder_mmap(struct file *filp, struct vm_area_struct *vma)
{
int ret;
struct vm_struct *area;
struct binder_proc *proc = filp->private_data;
const char *failure_string;
struct binder_buffer *buffer;
// 有效性检查:映射的内存不能大于4M
if ((vma->vm_end - vma->vm_start) > SZ_4M)
vma->vm_end = vma->vm_start + SZ_4M;
...
vma->vm_flags = (vma->vm_flags | VM_DONTCOPY) & ~VM_MAYWRITE;
mutex_lock(&binder_mmap_lock);
// 获取空闲的内核空间地址
area = get_vm_area(vma->vm_end - vma->vm_start, VM_IOREMAP);
...
// 将内核空间地址赋值给proc->buffer,即保存到进程上下文中
proc->buffer = area->addr;
// 计算 "内核空间地址" 和 "进程虚拟地址" 的偏移
proc->user_buffer_offset = vma->vm_start - (uintptr_t)proc->buffer;
mutex_unlock(&binder_mmap_lock);
// 为proc->pages分配内存
proc->pages = kzalloc(sizeof(proc->pages[0]) * ((vma->vm_end - vma->vm_start) / PAGE_SIZE), GFP_KERNEL);
...
// 内核空间的内存大小 = 进程虚拟地址区域(用户空间)的内存大小
proc->buffer_size = vma->vm_end - vma->vm_start;
vma->vm_ops = &binder_vm_ops;
// 将 proc(进程上下文信息) 赋值给vma私有数据
vma->vm_private_data = proc;
// 通过调用binder_update_page_range()来分配物理页面。
// 即,将物理内存映射到内核空间 以及 用户空间
if (binder_update_page_range(proc, 1, proc->buffer, proc->buffer + PAGE_SIZE, vma)) {
goto err_alloc_small_buf_failed;
}
buffer = proc->buffer;
INIT_LIST_HEAD(&proc->buffers);
// 将物理内存添加到proc->buffers链表中进行管理。
list_add(&buffer->entry, &proc->buffers);
buffer->free = 1;
binder_insert_free_buffer(proc, buffer);
proc->free_async_space = proc->buffer_size / 2;
barrier();
proc->files = get_files_struct(proc->tsk);
// 将用户空间地址信息保存到proc中
proc->vma = vma;
proc->vma_vm_mm = vma->vm_mm;
return 0;
...
}
说明:mmap的作用是进行内存映射。当应用调用mmap()映射内存到进程虚拟地址时,该函数会进行两个操作:第一,将指定大小的"物理内存" 映射到 "用户空间"(即,进程的虚拟地址中)。 第二,将该"物理内存" 也映射到 "内核空间(即,内核的虚拟地址中)"。
简单来说,就是"将进程虚拟地址空间和内核虚拟地址空间映射同一个物理页面"。为什么要这么做呢?这就是Binder进程间通信机制的精髓所在了!在讲解之前,先回顾一下进程间通信的基础知识。
在32位Linux系统的内存地址划分中,0~3G为用户空间,3~4G为内核空间。应用程序都运行在用户空间,而kernel和驱动都运行在内核空间。应用程序之间若涉及到数据交换(例如,Client进程向Server进程发送请求),即进程间通信,需要使用管道/消息队列/Socket/共享内存等IPC机制。共享内存控制比较复杂,而Socket常用于网络通信,这里将它们排除;剩下的就是管道/消息队列。下面对管道/消息队列的IPC等通信方式进行介绍。假如现在采用管道/消息队列从Client向Server发送请求,需要先将Client进程的数据拷贝到内核空间,然后再从内核空间拷贝到Server进程中。这其中,总共涉及到了2次内存拷贝!
而Binder机制则只需要进行1次内存拷贝即可!
在Binder通信机制中,mmap()会将Server进程的虚拟地址和内核虚拟地址映射到同一个物理页面。那么当Client进程向Server进程发送请求时,只需要将Client的数据拷贝到内核空间即可!由于Server进程的地址和内核空间映射到同一个物理页面,因此,Client中的数据拷贝到内核空间时,也就相当于拷贝到了Server进程中。因此,Binder通信机制中,数据传输时,只需要1次内存拷贝!
有了上面的理论基础,再来看mmap()是如何实现的。
(01) proc = flip->private_data。该flip的私有数据是在binder_open()中设置的,这里通过该私有数据就获取binder_proc变量proc。
(02) area = get_vm_area(vma->vm_end - vma->vm_start, VM_IOREMAP)。 它的作用是从内核虚拟地址中,获取指定大小的空闲地址,将空闲地址的起始地址赋值给area。 area是vm_struct类型,vm_struct是描述内核虚拟地址信息的结构体。此外,vm_area_struct则是描述进程虚拟地址信息的结构体。
(03) 接着,给proc->buffer(内核空间地址),proc->user_buffer_offset(内核空间地址和进程虚拟地址的偏移值),proc->pages(内核空间所占物理页面的数目),proc->buffer_size(内核地址空间的大小)赋值。
(04) 然后,调用binder_update_page_range(proc, 1, proc->buffer, proc->buffer + PAGE_SIZE, vma)。它作用是分配物理内存,下面看看它的实现。
4.2 Binder驱动中的binder_update_page_range()源码
static int binder_update_page_range(struct binder_proc *proc, int allocate,
void *start, void *end,
struct vm_area_struct *vma)
{
void *page_addr;
unsigned long user_page_addr;
struct vm_struct tmp_area;
struct page **page;
...
// 分配物理页面,
// 并将"内核空间"和"用户空间(进程的内存区域)"指向同一块物理内存。
for (page_addr = start; page_addr < end; page_addr += PAGE_SIZE) {
int ret;
struct page **page_array_ptr;
page = &proc->pages[(page_addr - proc->buffer) / PAGE_SIZE];
// 分配物理页面
*page = alloc_page(GFP_KERNEL | __GFP_ZERO);
...
tmp_area.addr = page_addr;
tmp_area.size = PAGE_SIZE + PAGE_SIZE /* guard page? */;
page_array_ptr = page;
// 将物理页面映射到内核空间中
ret = map_vm_area(&tmp_area, PAGE_KERNEL, &page_array_ptr);
...
user_page_addr =
(uintptr_t)page_addr + proc->user_buffer_offset;
// 将物理页面映射插入到进程的虚拟内存中
ret = vm_insert_page(vma, user_page_addr, page[0]);
...
}
return 0;
...
}
说明: binder_update_page_range()既可分配物理页面,也可以释放物理页面。当参数allocate=1时,会执行分配物理页面的操作;否则,会执行释放物理页面的操作。这里,allocate=1;因此,我们只关心分配物理页面的部分。
在for循环中,每分配一个物理页面都会先通过map_vm_area()将该物理内存映射到内核虚拟地址中;然后再将该物理页面插入到进程的虚拟地址空间。
至此,binder_open(128*1024)算是介绍完了。从"用户空间的ServiceManager进程" 和 "Binder驱动"这两个方面分析它的作用。
(01) ServiceManager进程:就是打开/dev/binder,同时映射物理内存到进程空间。
(02) Binder驱动:新建并初始化该进程对应的binder_proc结构体,同时将内核虚拟地址和该进程的虚拟地址映射到同一物理内存中。
5. binder_become_context_manager()
下面接着分析binder_become_context_manager(bs)。
int binder_become_context_manager(struct binder_state *bs)
{
return ioctl(bs->fd, BINDER_SET_CONTEXT_MGR, 0);
}
说明:根据前面介绍的Binder驱动初始化信息可知,ioctl()就是调用Binder驱动中的binder_ioctl()函数。
6. ioctl(, BINDER_SET_CONTEXT_MGR,)
6.1 Binder驱动中binder_ioctl()的BINDER_WRITE_READ相关部分的源码
// 全局binder实体,准确点说是ServiceManager的binder实体
static struct binder_node *binder_context_mgr_node;
// ServiceManager守护进程的uid
static uid_t binder_context_mgr_uid = -1;
static int binder_stop_on_user_error;
...
static long binder_ioctl(struct file *filp, unsigned int cmd, unsigned long arg)
{
int ret;
struct binder_proc *proc = filp->private_data;
struct binder_thread *thread;
unsigned int size = _IOC_SIZE(cmd);
void __user *ubuf = (void __user *)arg;
// 中断等待函数。
// 1. 当binder_stop_on_user_error < 2为true时;不会进入等待状态;直接跳过。
// 2. 当binder_stop_on_user_error < 2为false时,进入等待状态。
// 当有其他进程通过wake_up_interruptible来唤醒binder_user_error_wait队列,并且binder_stop_on_user_error < 2为true时;
// 则继续执行;否则,再进入等待状态。
ret = wait_event_interruptible(binder_user_error_wait, binder_stop_on_user_error < 2);
...
binder_lock(__func__);
// 在proc进程中查找该线程对应的binder_thread;若查找失败,则新建一个binder_thread,并添加到proc->threads中。
thread = binder_get_thread(proc);
...
switch (cmd) {
...
case BINDER_SET_CONTEXT_MGR:
if (binder_context_mgr_node != NULL) {
...
}
if (binder_context_mgr_uid != -1) {
...
} else
// 设置ServiceManager对应的uid
binder_context_mgr_uid = current->cred->euid;
// 新建binder实体,并将proc进程上下文信息保存到binder实体中;
// 然后,将该binder实体赋值给全局变量binder_context_mgr_node。
// 这个全局的binder实体,是ServiceManager对应的binder实体。
binder_context_mgr_node = binder_new_node(proc, NULL, NULL);
...
// 设置binder实体的引用计数等参数
binder_context_mgr_node->local_weak_refs++;
binder_context_mgr_node->local_strong_refs++;
binder_context_mgr_node->has_strong_ref = 1;
binder_context_mgr_node->has_weak_ref = 1;
break;
...
}
ret = 0;
err:
// 去掉thread的BINDER_LOOPER_STATE_NEED_RETURN标记
if (thread)
thread->looper &= ~BINDER_LOOPER_STATE_NEED_RETURN;
binder_unlock(__func__);
wait_event_interruptible(binder_user_error_wait, binder_stop_on_user_error < 2);
...
return ret;
}
说明:binder_ioctl()的内容很多,上面仅仅列出与BINDER_SET_CONTEXT_MGR相关的代码。
(01) proc = flip->private_data。该flip的私有数据是在binder_open()中设置的,这里通过该私有数据就获取binder_proc变量proc。
(02) 接着调用wait_event_interruptible(binder_user_error_wait, binder_stop_on_user_error < 2)。由于binder_stop_on_user_error是全局变量,它的初始值是0,因此binder_stop_on_user_error < 2为true,不进入中断等待,而是直接跳过该函数继续运行。
(03) binder_get_thread()会在proc中查找当前线程对应的binder_thread结构体;由于之前还未创建该线程的binder_thread结构体,因此查找失败。进而创建一个binder_thread结构体变量,并将其添加到proc->threads红黑树中,然后返回该变量。
(04) cmd的值是我们调用ioctl()传入的参数BINDER_SET_CONTEXT_MGR。在BINDER_SET_CONTEXT_MGR分支中,会设置binder_context_mgr_uid,binder_context_mgr_uid是一个全局变量,它代表ServiceManager对应的uid;接着,通过binder_new_node()新建一个Binder实体(即binder_node结构体对象),并将该Binder实体赋值给全局变量binder_context_mgr_node,binder_context_mgr_node就是Serveice Manager对应的Binder实体;最后,设置binder实体的引用计数等参数。
(05) 清除thread->looper的BINDER_LOOPER_STATE_NEED_RETURN标记。这个BINDER_LOOPER_STATE_NEED_RETURN标记,是在调用binder_get_thread()中创建binder_thread对象时添加的。
关于binder_node结构体,在Android Binder机制(二) Binder中的数据结构中有消息的介绍。特别需要了解的是,对于每一个Server,Binder驱动都会为其分配一个binder_node对象。对于ServiceManager这个Binder上下文管理者而言,Binder驱动更是会将它的Binder实体保存到全局变量中。
6.2 Binder驱动中的binder_get_thread()源码
下面看看binder_get_thread()中做了什么。
static struct binder_thread *binder_get_thread(struct binder_proc *proc)
{
struct binder_thread *thread = NULL;
struct rb_node *parent = NULL;
struct rb_node **p = &proc->threads.rb_node;
// 在proc->threads这棵红黑树中,查找是否有线程的pid和current->pid相同。
// 即,查找当前线程中是否创建过binder_thread信息
while (*p) {
parent = *p;
thread = rb_entry(parent, struct binder_thread, rb_node);
if (current->pid < thread->pid)
p = &(*p)->rb_left;
else if (current->pid > thread->pid)
p = &(*p)->rb_right;
else
break;
}
// 若当前线程中没有创建过binder_thread信息;
// 则创建binder_thread,并初始化;然后将其添加到binder_proc进程的proc->threads中
if (*p == NULL) {
thread = kzalloc(sizeof(*thread), GFP_KERNEL);
if (thread == NULL)
return NULL;
binder_stats_created(BINDER_STAT_THREAD);
// 将进程的上下文信息保存到thread中
thread->proc = proc;
thread->pid = current->pid;
// 初始化thread的等待队列
init_waitqueue_head(&thread->wait);
// 初始化thread的待处理事件列表
INIT_LIST_HEAD(&thread->todo);
// 将该thread链接到proc->threads这棵红黑树中
rb_link_node(&thread->rb_node, parent, p);
rb_insert_color(&thread->rb_node, &proc->threads);
thread->looper |= BINDER_LOOPER_STATE_NEED_RETURN;
thread->return_error = BR_OK;
thread->return_error2 = BR_OK;
}
return thread;
}
说明:
(01) 理解"红黑树"和"rb_entry"是理解while循环的前提。这里简单介绍下,proc->threads这棵红黑树是根据proc->thread->pid来排序的;而rb_entry(parent, struct binder_thread, rb_node)的作用根据binder_thread结构体对象中的已知成员的地址(binder_thread->rb_node的地址,也就是parent的值)来获取binder_thread结构体对象的地址。
(02) 很显然,由于之前没有创建过当前线程对应的binder_thread对象,所以*p==null为true。那么,接下来就新建binder_thread对象,并对其进行初始化,然后再添加到红黑树proc->threads中。
6.3 Binder驱动中的binder_new_node()源码
下面看看binder_ioctl()中调用的binder_new_node()的代码。
static struct binder_node *binder_new_node(struct binder_proc *proc,
void __user *ptr,
void __user *cookie)
{
struct rb_node **p = &proc->nodes.rb_node;
struct rb_node *parent = NULL;
struct binder_node *node;
// 在proc->nodes这棵红黑树中,查找有要查找的binder实体(通过ptr成员来判断)
while (*p) {
parent = *p;
node = rb_entry(parent, struct binder_node, rb_node);
if (ptr < node->ptr)
p = &(*p)->rb_left;
else if (ptr > node->ptr)
p = &(*p)->rb_right;
else
return NULL;
}
// 如果没有要找的binder实体,则新建该binder实体
node = kzalloc(sizeof(*node), GFP_KERNEL);
if (node == NULL)
return NULL;
binder_stats_created(BINDER_STAT_NODE);
// 将node链接到红黑树proc->nodes中
rb_link_node(&node->rb_node, parent, p);
rb_insert_color(&node->rb_node, &proc->nodes);
node->debug_id = ++binder_last_id;
// 将进程上下文信息保存到node->proc中
node->proc = proc;
node->ptr = ptr;
node->cookie = cookie;
node->work.type = BINDER_WORK_NODE;
INIT_LIST_HEAD(&node->work.entry);
INIT_LIST_HEAD(&node->async_todo);
return node;
}
说明:跟binder_get_thread()类似,这里是先在proc->nodes这棵红黑树中查找是否有binder实体(即binder_node对象)存在。有的话,返回NULL,即不需要新建binder实体;没有的话,则新建并初始化binder_node对象,然后将其添加到proc->nodes红黑树中。
至此,binder_become_context_manager()就介绍完了。它的作用:
(01) ServiceManager进程:告诉Kernel驱动,当前进程(即ServiceManager进程)是Binder上下文管理者。
(02) Binder驱动:新建当前线程对应的binder_thread对象,并将其添加到进程上下文信息binder_proc的threads红黑树中;新建ServiceManager对应的binder实体,并将该binder实体保存到全局变量binder_context_mgr_node中。
7. binder_loop()
我们继续回到main()函数,分析一下binder_loop(bs, svcmgr_handler)。
7.1 binder_loop()的源码
void binder_loop(struct binder_state *bs, binder_handler func)
{
int res;
struct binder_write_read bwr;
unsigned readbuf[32];
bwr.write_size = 0;
bwr.write_consumed = 0;
bwr.write_buffer = 0;
// 告诉Kernel,ServiceManager进程进入了消息循环状态。
readbuf[0] = BC_ENTER_LOOPER;
binder_write(bs, readbuf, sizeof(unsigned));
for (;;) {
bwr.read_size = sizeof(readbuf);
bwr.read_consumed = 0;
bwr.read_buffer = (unsigned) readbuf;
// 向Kernel中发送消息(先写后读)。
// 先将消息传递给Kernel,然后再从Kernel读取消息反馈
res = ioctl(bs->fd, BINDER_WRITE_READ, &bwr);
...
// 解析读取的消息反馈
res = binder_parse(bs, 0, readbuf, bwr.read_consumed, func);
...
}
}
说明: 该代码定义在frameworks/native/cmds/servicemanager/binder.c中。
binder_loop()首先调用binder_write(,BC_ENTER_LOOPER,)告诉Kernel,ServiceManager进入了消息循环状态。紧接着,就通过ioctl(,BINDER_WRITE_READ,)进入消息循环,等待Client发送请求(例如,MediaPlayer进程调用addService将MediaPlayer注册到ServiceManager中进行管理)。如果没有消息,则进入中断等待状态;如果有消息,则进行消息处理!
7.2 binder_write()的源码
下面看看binder_loop()中的binder_write(,BC_ENTER_LOOPER,)。
int binder_write(struct binder_state *bs, void *data, unsigned len)
{
struct binder_write_read bwr;
int res;
bwr.write_size = len; // 数据长度
bwr.write_consumed = 0;
bwr.write_buffer = (unsigned) data; // 数据是BINDER_WRITE_READ
bwr.read_size = 0;
bwr.read_consumed = 0;
bwr.read_buffer = 0;
res = ioctl(bs->fd, BINDER_WRITE_READ, &bwr);
if (res < 0) {
fprintf(stderr,"binder_write: ioctl failed (%s)\n",
strerror(errno));
}
return res;
}
说明:binder_write()单单只是向Kernel发送一个消息,而不会去读取消息反馈。这里的ioctl()又会调用到binder_ioctl()。
这里涉及到了Binder通信中常用的数据结构体binder_write_read。bwr.write_size>0,表示通过ServiceManager有数据(即BC_ENTER_LOOPER指令)发送给Binder驱动,而发送的数据就保存在bwr.write_buffer中,bwr.write_consumed则表示已经被读取并处理的数据的大小。bwr.read_XXX则是用来保存Binder驱动即将反馈给ServiceManager的信息的。
更多关于binder_write_read的介绍,请参考Android Binder机制(二) Binder中的数据结构。
7.3 Binder驱动中binder_ioctl()的BINDER_WRITE_READ相关部分的源码
下面我们看看Binder驱动部分的对应代码。
static long binder_ioctl(struct file *filp, unsigned int cmd, unsigned long arg)
{
int ret;
struct binder_proc *proc = filp->private_data;
struct binder_thread *thread;
unsigned int size = _IOC_SIZE(cmd);
void __user *ubuf = (void __user *)arg;
// 中断等待函数。
// 1. 当binder_stop_on_user_error < 2为true时;不会进入等待状态;直接跳过。
// 2. 当binder_stop_on_user_error < 2为false时,进入等待状态。
// 当有其他进程通过wake_up_interruptible来唤醒binder_user_error_wait队列,并且binder_stop_on_user_error < 2为true时;
// 则继续执行;否则,再进入等待状态。
ret = wait_event_interruptible(binder_user_error_wait, binder_stop_on_user_error < 2);
binder_lock(__func__);
// 在proc进程中查找该线程对应的binder_thread;若查找失败,则新建一个binder_thread,并添加到proc->threads中。
thread = binder_get_thread(proc);
...
switch (cmd) {
case BINDER_WRITE_READ: {
struct binder_write_read bwr;
...
// 将binder_write_read从"用户空间" 拷贝到 "内核空间"
if (copy_from_user(&bwr, ubuf, sizeof(bwr))) {
...
}
// 如果write_size>0,则进行写操作
if (bwr.write_size > 0) {
ret = binder_thread_write(proc, thread, (void __user *)bwr.write_buffer, bwr.write_size, &bwr.write_consumed);
...
}
// 如果read_size>0,则进行读操作
if (bwr.read_size > 0) {
ret = binder_thread_read(proc, thread, (void __user *)bwr.read_buffer, bwr.read_size, &bwr.read_consumed, filp->f_flags & O_NONBLOCK);
...
}
...
if (copy_to_user(ubuf, &bwr, sizeof(bwr))) {
ret = -EFAULT;
goto err;
}
break;
}
...
}
ret = 0;
...
return ret;
}
说明:
(01) wait_event_interruptible(binder_user_error_wait, binder_stop_on_user_error < 2)中binder_stop_on_user_error < 2为true。因此,不进入中断等待状态而是直接跳过该函数。
(02) thread = binder_get_thread(proc)。由于在上一次调用ioctl时,已经创建了该线程对应的binder_thread对象。因此,这次能在proc->threads红黑树中找到对应的binder_thread对象,然后,返回给thread。
(03) copy_from_user()的作用是将用户空间的数据拷贝到内核空间。即,将ServiceManager中调用ioctl(bs->fd, BINDER_WRITE_READ, &bwr)时的bwr对象拷贝到Binder驱动中。
(04) 在binder_write()中,设置的bwr.write_size>0;所以,调用binder_thread_write()进行写操作。
(05) 在binder_write()中,设置的bwr.read_size为0;所以,不调用binder_thread_read()进行读操作。
(06) 读写操作完毕之后,将bwr从内核空间再拷贝到用户空间。
7.4 Binder驱动中binder_thread_write()的源码
int binder_thread_write(struct binder_proc *proc, struct binder_thread *thread,
void __user *buffer, int size, signed long *consumed)
{
uint32_t cmd;
void __user *ptr = buffer + *consumed;
void __user *end = buffer + size;
// 读取binder_write_read.write_buffer中的内容。
// 每次读取32bit(即4个字节)
while (ptr < end && thread->return_error == BR_OK) {
// 从用户空间读取32bit到内核中,并赋值给cmd。
if (get_user(cmd, (uint32_t __user *)ptr))
return -EFAULT;
ptr += sizeof(uint32_t);
...
switch (cmd) {
...
case BC_ENTER_LOOPER:
...
// 设置线程的状态为BINDER_LOOPER_STATE_ENTERED;
// 即,进入了循环状态
thread->looper |= BINDER_LOOPER_STATE_ENTERED;
break;
...
}
// 更新bwr.write_consumed的值
*consumed = ptr - buffer;
}
return 0;
}
说明:binder_thread_write()从brw.write_buffer中读取4个字节作为cmd。这4个字节就是ServiceManager传递的指令BC_ENTER_LOOPER。
在BC_ENTER_LOOPER对应的switch分支中,就是将BINDER_LOOPER_STATE_ENTERED加入到thread->looper中。即,告诉Binder驱动,ServiceManager进程进入了消息循环状态。
8. for(;;)
继续往下走。回到binder_loop()中后,便进入了for(;;)消息循环中。进入循环后,首先调用ioctl(,BINDER_WRITE_READ,);此时,对应的bwr内容如下:
bwr.write_size = 0;
bwr.write_consumed = 0;
bwr.write_buffer = 0;
bwr.read_size = sizeof(readbuf);
bwr.read_consumed = 0;
bwr.read_buffer = (unsigned) readbuf;
bwr.write_size=0,而bwr.read_size>0;表示只会从Binder驱动读取数据,而并不会向Binder驱动中写入数据。接着,调用ioctl()便再次进入到Binder驱动binder_ioctl()中。
8.1 Binder驱动中binder_ioctl()的BINDER_WRITE_READ相关部分的源码
static long binder_ioctl(struct file *filp, unsigned int cmd, unsigned long arg)
{
...
switch (cmd) {
case BINDER_WRITE_READ: {
struct binder_write_read bwr;
...
// 将binder_write_read从"用户空间" 拷贝到 "内核空间"
if (copy_from_user(&bwr, ubuf, sizeof(bwr))) {
...
}
// 如果write_size>0,则进行写操作
if (bwr.write_size > 0) {
ret = binder_thread_write(proc, thread, (void __user *)bwr.write_buffer, bwr.write_size, &bwr.write_consumed);
...
}
// 如果read_size>0,则进行读操作
if (bwr.read_size > 0) {
ret = binder_thread_read(proc, thread, (void __user *)bwr.read_buffer, bwr.read_size, &bwr.read_consumed, filp->f_flags & O_NONBLOCK);
...
}
...
if (copy_to_user(ubuf, &bwr, sizeof(bwr))) {
ret = -EFAULT;
goto err;
}
break;
}
...
}
ret = 0;
...
return ret;
}
说明:由于此次bwr.write_size=0,而bwr.read_size不为0。因此,在通过copy_from_user()将数据从用户空间拷贝到内核空间之后,不进行写操作,而只进行读操作,即只执行binder_thread_read()。 在读操作执行完毕之后,再通过copy_to_user(),将数据返回给用户空间。
8.2 Binder驱动中binder_thread_read()的源码
static int binder_thread_read(struct binder_proc *proc,
struct binder_thread *thread,
void __user *buffer, int size,
signed long *consumed, int non_block)
{
void __user *ptr = buffer + *consumed;
void __user *end = buffer + size;
int ret = 0;
int wait_for_proc_work;
// 如果*consumed=0,则写入BR_NOOP到用户传进来的bwr.read_buffer缓存区
if (*consumed == 0) {
if (put_user(BR_NOOP, (uint32_t __user *)ptr))
return -EFAULT;
// 修改指针位置
ptr += sizeof(uint32_t);
}
retry:
// 等待proc进程的事务标记。
// 当线程的事务栈为空 并且 待处理事务列表为空时,该标记位true。
wait_for_proc_work = thread->transaction_stack == NULL &&
list_empty(&thread->todo);
...
// 设置线程为"等待状态"
thread->looper |= BINDER_LOOPER_STATE_WAITING;
if (wait_for_proc_work)
proc->ready_threads++;
...
if (wait_for_proc_work) {
...
// 设置当前线程的优先级=proc->default_priority。
// 即,当前线程要处理proc的事务,所以设置优先级和proc一样。
binder_set_nice(proc->default_priority);
if (non_block) {
// 非阻塞式的读取,则通过binder_has_proc_work()读取proc的事务;
// 若没有,则直接返回
if (!binder_has_proc_work(proc, thread))
ret = -EAGAIN;
} else
// 阻塞式的读取,则阻塞等待事务的发生。
ret = wait_event_interruptible_exclusive(proc->wait, binder_has_proc_work(proc, thread));
} else {
...
}
...
}
说明:
(01) 很显然,bwr.read_consumed=0。因此,*consumed=0,那么就将BR_NOOP拷贝到用户空间的bwr.read_buffer缓存区中。
(02) 目前为止,并没有进程将事务添加到当前线程中;因此,线程的事务栈和待处理事务队列都是为空。于是得到wait_for_proc_work的值是true。
(03) binder_set_nice()的作用是设置当前线程的优先级=proc->default_priority。
(04) 根据上下文,可知non_block为false。因此调用wait_event_interruptible_exclusive(proc->wait, binder_has_proc_work(proc, thread))。 而目前ServiceManager进程中没有待处理事务,因此binder_has_proc_work(proc, thread)为false。从而当前线程进入中断等待状态,等待其它进程将ServiceManager唤醒。
至此,ServiceManager进入了等待状态,binder_loop()就分析就暂告一段落。
(01) ServiceManager进程:binder_loop()通过BC_ENTER_LOOPER告诉Kernel,ServiceManager进入了消息循环状态。接着,ServiceManager就进入等待状态,等待Client请求。
(02) Binder驱动:已知ServiceManager进入了消息循环状态;在收到ServiceManager的BINDER_WRITE_READ消息之后,就去ServiceManager的从进程上下文binder_proc对象中读取是否有待处理事务,由于没有事务处理,则将ServiceManager线程设为中断等待状态。
ServiceManager流程总结
总结上面的分析,ServiceManager的main()进程完成了以下工作。
-
对于ServiceManager进程而言
它打开了Binder设备文件,并且将内存映射到ServiceManager的进程空间。然后,它告诉Binder驱动自己是Binder上下文的管理者。最后,进入消息循环,等待Client请求。 -
对于Binder驱动而言
初始化了ServiceManager对应的进程上下文环境(即binder_proc变量),并将内核虚拟地址和进程虚拟地址映射到同一物理内存中。然后,新建当前线程对应的binder_thread对象,并将其添加到进程上下文信息binder_proc->threads红黑树中。在得知ServiceManager是Binder上下文管理者后,建立ServiceManager对应的Binder实体,并将该Binder实体保存到全局变量中。最后,得知ServiceManager进入消息循环后,由于当前线程中没有事务可处理,则进入中断等待状态,等待其他进程将其唤醒。














 1117
1117











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









