







2015年11月17上传
以下是我实现的相机标定 C++ 类,构造函数如下:
CCalibration::CCalibration(CvSize _board_sz, double _board_dt, int _n_boards)
{
//标定板的信息
board_sz = _board_sz;
board_dt = _board_dt;
n_boards = _n_boards;
//为标定参数分配内存
intrinsic_matrix = cvCreateMat(3,3,CV_32FC1);
distortion_coeffs = cvCreateMat(4,1,CV_32FC1);
}
其中:
_board_sz——标定板横纵坐标角点数;
_board_dt——相邻两次图像获取的时间间隔(单位:秒);
_n_boards——获取图像的总数。
以下C++代码在VS2010 + OpenCV2.4.8下调试通过。
工程文件下载地址:http://download.csdn.net/detail/holamirai/9275817
本工程使用的标定板下载地址:http://download.csdn.net/detail/holamirai/9275825
将PDF文件按1:1打印到A4纸上即可。
附上代码:
CCalibration类定义如下:
CCalibration.h 文件:
/******************************************
* Copyright (C) 2015 HolaMirai(HolaMirai@163.com)
* All rights reserved.
*
* 文件名:CCalibration.h
* 摘要:CCalibration类实现相机标定
* 当前版本:V1.0, 2015年11月17日,HolaMirai,创建该文件
* 历史记录:...
******************************************/
/*
* 类定义说明
*/
/********************************************
* CCalibration类
* CCalibration接收标定板横纵坐标角点数_board_sz, 相邻两次图像获取的时间间隔_board_dt(单位:秒), 获取图像的总数_n_boards
* 使用calibrateFromCamera()直接从相机中获取标定板图像,并标定
* 使用calibrateFromFile()从已获取的图像集中标定相机
*
*
********************************************/
#ifndef CCALIBRATION_H
#define CCALIBRATION_H
#include <cv.h>
#include <highgui.h>
#include <stdio.h>
#include <stdlib.h>
class CCalibration
{
public:
CCalibration(CvSize _board_sz, double _board_dt, int _n_boards = 15);
~CCalibration();
public:
bool doCalibrate(const CvMat* const image_points, const CvMat* const object_points,const CvMat* const point_counts, CvSize size);
bool calibrateFromCamera();
bool calibrateFromFile();
void display();
protected:
private:
CvSize board_sz; //标定板信息
int n_boards; //视场总数
double board_dt; //相邻视场间的获取时间间隔
private:
CvMat* intrinsic_matrix;//内参数矩阵
CvMat* distortion_coeffs;//畸变矩阵
};
#endif
/******************************************
* Copyright (C) 2015 HolaMirai(HolaMirai@163.com)
* All rights reserved.
*
* 文件名:CCalibration.cpp
* 摘要:相机标CCalibration类的定实现文件
* 当前版本:V1.0, 2015年11月17日, HolaMirai, 创建该文件
* 历史记录:
******************************************/
#include"CCalibration.h"
/*
* 函数名称:CCalibration
* 函数功能:类构造函数
* 函数入口:
* 输入参数:标定板横纵坐标角点数_board_sz, 相邻两次图像获取的时间间隔_board_dt(单位:秒), 获取图像的总数_n_boards
* 输出参数:无
* 返 回 值:无
* 其它说明:
*/
CCalibration::CCalibration(CvSize _board_sz, double _board_dt, int _n_boards)
{
//标定板的信息
board_sz = _board_sz;
board_dt = _board_dt;
n_boards = _n_boards;
//为标定参数分配内存
intrinsic_matrix = cvCreateMat(3,3,CV_32FC1);
distortion_coeffs = cvCreateMat(4,1,CV_32FC1);
}
CCalibration::~CCalibration()
{
cvReleaseMat(&intrinsic_matrix);
cvReleaseMat(&distortion_coeffs);
}
/*
* 函数名称:calibrateFromCamera
* 函数功能:直接从相机实时获取标定板图像,用于标定
* 函数入口:
* 输入参数:五
* 输出参数:无
* 返 回 值:是否标定成功,true表示成功,false表示失败
* 其它说明:
*/
bool CCalibration::calibrateFromCamera()
{
cvNamedWindow("Calibration",CV_WINDOW_AUTOSIZE);
cvNamedWindow("Live",CV_WINDOW_AUTOSIZE);
CvCapture* capture = cvCreateCameraCapture( 0 );//将要标定的摄像头
assert( capture );
int board_n = board_sz.width * board_sz.height;//角点总数
CvMat* image_points = cvCreateMat(n_boards*board_n,2,CV_32FC1);// cvMat* cvCreateMat ( int rows, int cols, int type )
CvMat* object_points = cvCreateMat(n_boards*board_n,3,CV_32FC1);//cvCreateMat预定义类型的结构如下:CV_<bit_depth> (S|U|F)C<number_of_channels>
CvMat* point_counts = cvCreateMat(n_boards,1,CV_32SC1);//cvCreateMat矩阵的元素可以是32位浮点型数据(CV_32FC1),或者是无符号的8位三元组的整型数据(CV_8UC3)
CvPoint2D32f* corners = new CvPoint2D32f[ board_n ];
IplImage *image = cvQueryFrame( capture );
//imgSize = cvGetSize(image);
IplImage *gray_image = cvCreateImage(cvGetSize(image),8,1);//subpixel 创建单通道灰度图像
int corner_count;
int successes = 0;//图像系列index
int step, frame = 0;
//忽略开始前2s时间的图片
for (int i = 0; i < 33*2; i++)
{
image = cvQueryFrame(capture);
cvShowImage("Live",image);
cvWaitKey(30);
}
//获取足够多视场图片用于标定
while (successes < n_boards)
{
image = cvQueryFrame(capture);
cvShowImage("Live", image);
cvWaitKey(33);//一帧的时间间隔
//每隔board_dt秒取一张图像
if ( (frame++ % ((int)(33 * board_dt)) ) == 0 )
{
//Find chessboard corners:
int found = cvFindChessboardCorners(image, board_sz, corners, &corner_count,
CV_CALIB_CB_ADAPTIVE_THRESH | CV_CALIB_CB_FILTER_QUADS);
if(found == 0) continue;//未正确找到角点,继续下一次
//Get Subpixel accuracy on those corners
cvCvtColor(image, gray_image, CV_BGR2GRAY); //转换为灰度图像
cvFindCornerSubPix(gray_image, corners, corner_count, //cvFindChessboardCorners找到的角点仅仅是近似值,必须调用此函数达到亚像素精度,如果第一次定位...
cvSize(11,11),cvSize(-1,-1), cvTermCriteria( //角点时忽略调用此函数,那么会导致标定的实际错误
CV_TERMCRIT_EPS+CV_TERMCRIT_ITER, 30, 0.1 ));
// 如果该视场获得了好的结果,保存它
// If we got a good board, add it to our data
if (corner_count == board_n)
{
step = successes*board_n;
for( int i=step, j=0; j<board_n; ++i,++j )
{
CV_MAT_ELEM(*image_points, float,i,0) = corners[j].x; // CV_MAT_ELEM 用来访问矩阵每个元素的宏,这个宏只对单通道矩阵有效,多通道会报错...
CV_MAT_ELEM(*image_points, float,i,1) = corners[j].y; //CV_MAT_ELEM( matrix, elemtype, row, col )
CV_MAT_ELEM(*object_points,float,i,0) = j/board_sz.width; //matrix:要访问的矩阵,elemtype:矩阵元素的类型,row:所要访问元素的行数,col:所要访问元素的列数
CV_MAT_ELEM(*object_points,float,i,1) = j%board_sz.width;
CV_MAT_ELEM(*object_points,float,i,2) = 0.0f;
}
CV_MAT_ELEM(*point_counts, int,successes,0) = board_n;
successes++;
}
//Draw corners
cvDrawChessboardCorners(image, board_sz, corners, corner_count, found);//found为cvFindChessboardCorners的返回值
char text[10];
sprintf(text,"%d/%d", successes,n_boards);
CvFont font = cvFont(2,2);
cvPutText(image,text,cvPoint(40,40),&font,cvScalar(0,0,255));
cvShowImage( "Calibration", image );
}
}
//获取了足够多视场,结束获取
cvDestroyWindow("Calibration");
cvDestroyWindow("Live");
//计算
doCalibrate(image_points, object_points, point_counts, cvGetSize(image));
//结束
delete []corners;
cvReleaseMat(&image_points);
cvReleaseMat(&object_points);
cvReleaseMat(&point_counts);
cvReleaseImage(&gray_image);
cvReleaseCapture(&capture);
return true;
}/* calibrateFromCamera() */
/*
* 函数名称:calibrateFromCamera
* 函数功能:根据已获取的图像文件(.bmp格式),标定相机
* 函数入口:
* 输入参数:无
* 输出参数:无
* 返 回 值:是否标定成功,true表示成功,false表示失败
* 其它说明: 只接受.bmp格式的图片,且图片尺寸要相同,若要标定其他格式图片,请将本函数内的.bmp替换成.jpg
* 文件统一命名格式为 calib_N.bmp,其中N必须从0开始
*/
bool CCalibration::calibrateFromFile()
{
cvNamedWindow("Calibration", CV_WINDOW_AUTOSIZE);
//cvNamedWindow("FileImage", CV_WINDOW_AUTOSIZE);
int board_n = board_sz.width * board_sz.height;//角点总数
CvMat* image_points = cvCreateMat(n_boards*board_n,2,CV_32FC1);// cvMat* cvCreateMat ( int rows, int cols, int type )
CvMat* object_points = cvCreateMat(n_boards*board_n,3,CV_32FC1);//cvCreateMat预定义类型的结构如下:CV_<bit_depth> (S|U|F)C<number_of_channels>
CvMat* point_counts = cvCreateMat(n_boards,1,CV_32SC1);//cvCreateMat矩阵的元素可以是32位浮点型数据(CV_32FC1),或者是无符号的8位三元组的整型数据(CV_8UC3)
CvPoint2D32f* corners = new CvPoint2D32f[ board_n ];
char imgName[20] = "calib_0.bmp";
IplImage *image = cvLoadImage(imgName,1);
IplImage *gray_image = cvCreateImage(cvGetSize(image),8,1);//subpixel 创建单通道灰度图像
int corner_count;
int successes = 0, index = 0;//图像系列index
int step;
//获取足够多视场图片用于标定
while (successes < n_boards)
{
sprintf(imgName, "calib_%d.bmp",index++);
image = cvLoadImage(imgName,1);
if ( !image ) break; //无此图片,则停止
cvWaitKey(1000*board_dt);//一帧的时间间隔
//Find chessboard corners:
int found = cvFindChessboardCorners(image, board_sz, corners, &corner_count,
CV_CALIB_CB_ADAPTIVE_THRESH | CV_CALIB_CB_FILTER_QUADS);
if(found == 0) continue;//未正确找到角点,继续下一次
//Get Subpixel accuracy on those corners
cvCvtColor(image, gray_image, CV_BGR2GRAY); //转换为灰度图像
cvFindCornerSubPix(gray_image, corners, corner_count, //cvFindChessboardCorners找到的角点仅仅是近似值,必须调用此函数达到亚像素精度,如果第一次定位...
cvSize(11,11),cvSize(-1,-1), cvTermCriteria( //角点时忽略调用此函数,那么会导致标定的实际错误
CV_TERMCRIT_EPS+CV_TERMCRIT_ITER, 30, 0.1 ));
// 如果该视场获得了好的结果,保存它
// If we got a good board, add it to our data
if (corner_count == board_n)
{
step = successes*board_n;
for( int i=step, j=0; j<board_n; ++i,++j )
{
CV_MAT_ELEM(*image_points, float,i,0) = corners[j].x; // CV_MAT_ELEM 用来访问矩阵每个元素的宏,这个宏只对单通道矩阵有效,多通道会报错...
CV_MAT_ELEM(*image_points, float,i,1) = corners[j].y; //CV_MAT_ELEM( matrix, elemtype, row, col )
CV_MAT_ELEM(*object_points,float,i,0) = j/board_sz.width; //matrix:要访问的矩阵,elemtype:矩阵元素的类型,row:所要访问元素的行数,col:所要访问元素的列数
CV_MAT_ELEM(*object_points,float,i,1) = j%board_sz.width;
CV_MAT_ELEM(*object_points,float,i,2) = 0.0f;
}
CV_MAT_ELEM(*point_counts, int,successes,0) = board_n;
successes++;
}
//Draw corners
cvDrawChessboardCorners(image, board_sz, corners, corner_count, found);//found为cvFindChessboardCorners的返回值
char text[10];
sprintf(text,"%d/%d", successes,n_boards);
CvFont font = cvFont(2,2);
cvPutText(image,text,cvPoint(40,40),&font,cvScalar(0,0,255));
cvShowImage( "Calibration", image );
}
//获取了足够多视场,结束获取
cvDestroyWindow("Calibration");
//cvDestroyWindow("FileImage");
doCalibrate(image_points, object_points, point_counts, cvGetSize(image));
delete []corners;
cvReleaseMat(&image_points);
cvReleaseMat(&object_points);
cvReleaseMat(&point_counts);
cvReleaseImage(&image);
cvReleaseImage(&gray_image);
return true;
} /* calibrateFromFile() */
/*
* 函数名称:doCalibrate
* 函数功能:计算相机内参数和畸变参数
* 函数入口:
* 输入参数:存储图像角点坐标(成像仪坐标)信息的矩阵指针image_points,存储有标定板角点坐标(世界坐标)信息的矩阵指针object_points
* 存储有各图像寻找到的角点个数信息的矩阵指针point_counts,图像尺寸size
* 输出参数:无
* 返 回 值: 是否成功,true成功,false失败
* 其它说明: 标定结果同时存储到当前目录Intrinsics.xml,Distortion.xml文件中
*/
bool CCalibration::doCalibrate(const CvMat* const image_points, const CvMat* const object_points,const CvMat* const point_counts, CvSize size)
{
//****************************开始标定*************************//
// 初始化内参数矩阵的fx和fy为1.0f
CV_MAT_ELEM( *intrinsic_matrix, float, 0, 0 ) = 1.0f;
CV_MAT_ELEM( *intrinsic_matrix, float, 1, 1 ) = 1.0f;
//**************计算标定参数*************//
//CALIBRATE THE CAMERA!
cvCalibrateCamera2( object_points, image_points, point_counts, size,
intrinsic_matrix, distortion_coeffs,
NULL, NULL,0 //CV_CALIB_FIX_ASPECT_RATIO
);
//SAVE THE INTRINSICS AND DISTORTIONS
cvSave("Intrinsics.xml",intrinsic_matrix);//保存摄像头内参数
cvSave("Distortion.xml",distortion_coeffs);//保存摄像头外参数
return true;
}/* doCalibrate() */
/*
* 函数名称:display
* 函数功能:根据标定参数,显示修正后的视频图像
* 函数入口:
* 输入参数:无
* 输出参数:无
* 返 回 值:
* 其它说明:
*/
void CCalibration::display()
{
cvNamedWindow("Undistort", CV_WINDOW_AUTOSIZE);//显示修正后图像
CvCapture *capture = cvCreateCameraCapture(0);
IplImage *frame = cvQueryFrame(capture);
IplImage *imgUndistort = cvCreateImage(cvGetSize(frame),frame->depth,frame->nChannels);
// EXAMPLE OF LOADING THESE MATRICES BACK IN:
CvMat *intrinsic = (CvMat*)cvLoad("Intrinsics.xml");//加载摄像头内参数
CvMat *distortion = (CvMat*)cvLoad("Distortion.xml");//加载摄像头外参数
// Build the undistort map which we will use for all subsequent frames.
IplImage* mapx = cvCreateImage( cvGetSize(frame), IPL_DEPTH_32F, 1 );
IplImage* mapy = cvCreateImage( cvGetSize(frame), IPL_DEPTH_32F, 1 );
//计算畸变映射 即根据摄像头内、外参数,计算出如果没有这些畸变的话,摄像头获得的理想图像
cvInitUndistortMap(intrinsic, distortion, mapx, mapy);
while(cvWaitKey(33) != 27) //ESC
{
frame = cvQueryFrame(capture);
cvRemap( frame, imgUndistort, mapx, mapy);
cvShowImage("Undistort", imgUndistort);
}
cvReleaseCapture(&capture);
cvReleaseImage(&imgUndistort);
cvDestroyWindow("Undistort");
}/* display() */
测试程序文件
test.cpp代码
#include <cv.h>
#include <highgui.h>
#include "iostream"
#include "CCalibration.h"
using namespace std;
void main()
{
CCalibration calib(cvSize(7,8),1,10);
//从相机中获取图像标定
//calib.calibrateFromCamera();
//从已有图像中标定
calib.calibrateFromFile();
//运用标定结果显示修正后图像
calib.display();
//system("pause");
}
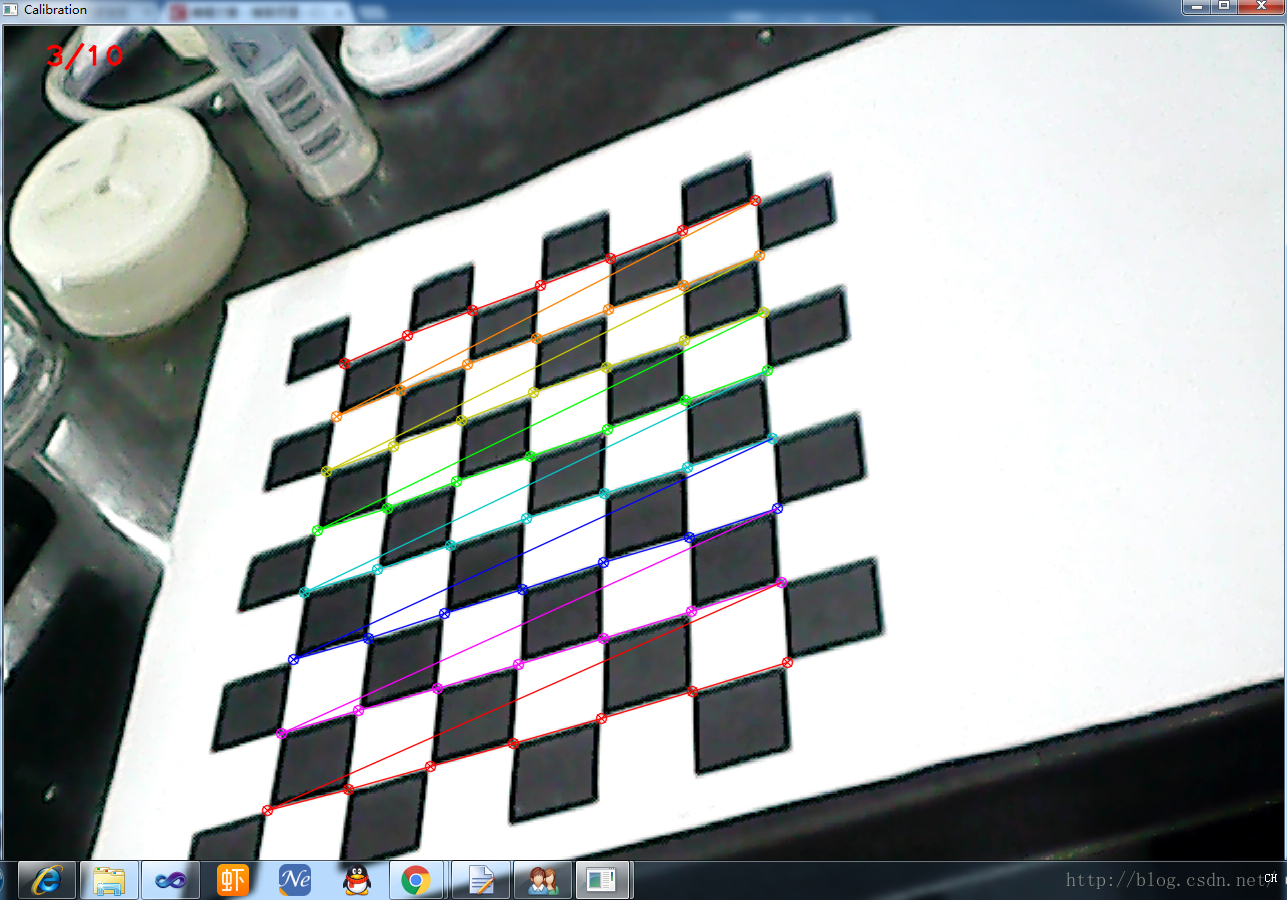
下图是标定过程中实时显示标定结果
转载请注明作者和出处:http://blog.csdn.net/holamirai,未经允许请勿用于商业用途.















 585
585

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









