







安全密码: safety
工厂模式: 在主界面上从左向右滑屏 输入 lightbot
示教器里面是Linux,是可以登录的,用户名root 密码 easybot
默认键盘布局是丹麦语..T_T
自定义程序在 /programs/文件夹下
六维度姿态表示方法p[x y z rx ry rz] 前三个分量表示平移,后三个分量表示Rodrigues旋转。
可通过Rodrigues旋转公式转换成旋转矩阵
坐标系(UR称feature)
基座坐标系: 竖直向上为z正轴,电源线为y正轴
TCP坐标系: 中心轴向外为z正轴,电缆处为y负轴
法兰盘坐标系: 不存在
示教器将负责将框图转换成URScript脚本,通过网络发送。
发送的指令覆盖上一条指令,立即被执行。如果想要多条指令依次执行,则需要用函数包裹。
movej 是各轴独立移动
movel 是沿直线移动
movep 是先直线然后圆弧
blending 融合半径通过r参数实现。一段典型的移动指令如下
movej([2.5, -2.0, -1.3, 0.56, 1.39, 0.0], a=1.0, v=0.08, r=0.01)
movej([2.6, -2.1, -1.6, 0.4, 1.5, 0], a=1.0, v=0.08, r=0.01)也可使用t=? 参数指定移动事件,此时速度参数无效
servo模式中,
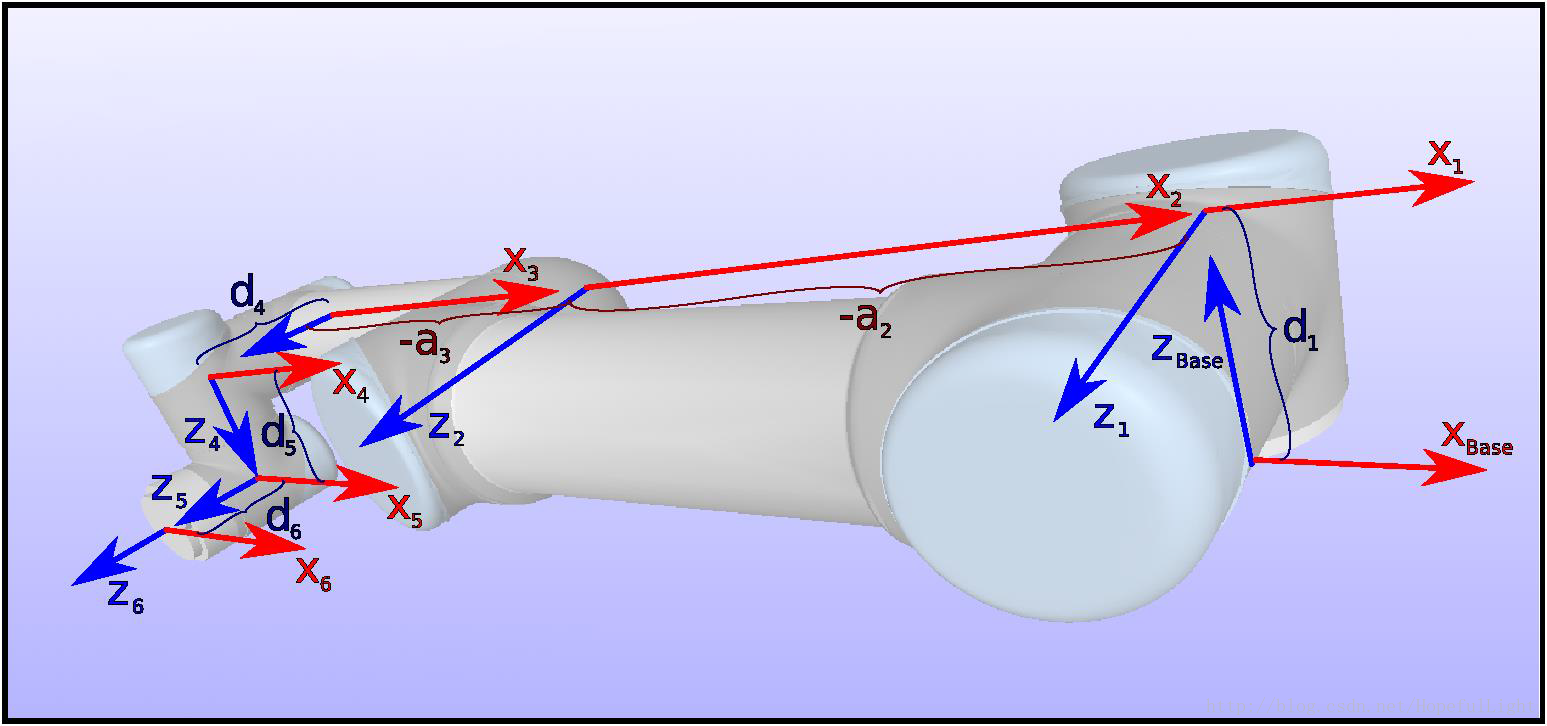
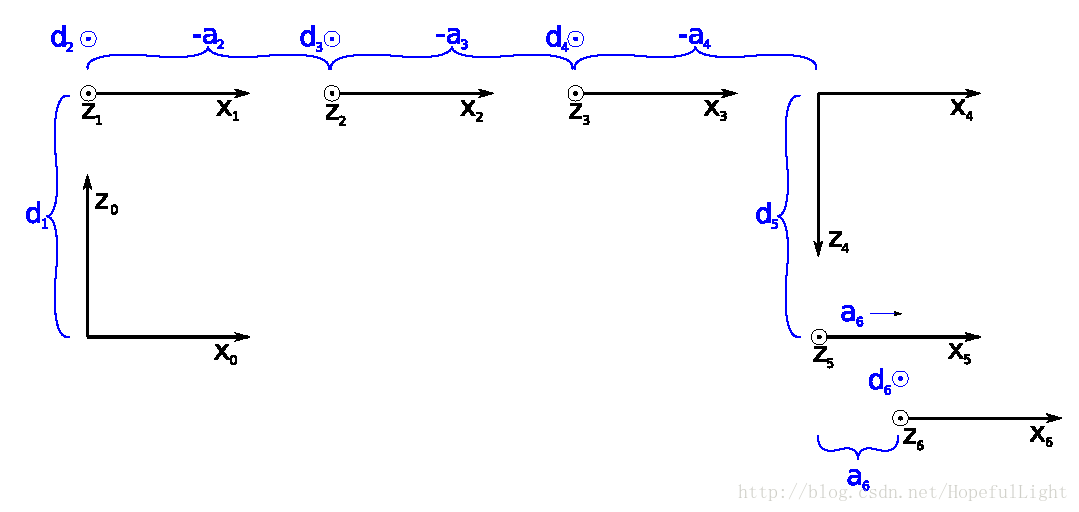
DH参数
我们使用矩阵相乘表示机械臂末端中心点(Tool Central Point, TCP),如
其中各个 Ti+1i 应用DH参数表示
齐次变换是可以直接求逆的!
还可以利用变换矩阵的特殊性质进行化简
DH参数的完整表达
UR系列机械别的DH参数见附录
附录
UR系列DH参数
Denavit–Hartenberg parameters for UR5:
[Base, Upper Arm, Lower arm, Wrist 2, Wrist 3, Tool Mounting Bracket]
a = [0, -0.42500, -0.39225, 0, 0, 0]
d = [0.089159, 0, 0, 0.10915, 0.09465, 0.0823]
alpha = [1.570796327, 0, 0, 1.570796327, -1.570796327, 0]
mass = [3.7000, 8.3930, 2.33, 1.2190, 1.2190, 0.1897]
center_of_mass = [[0,-0.02561, 0.00193], [0.2125, 0, 0.11336], [0.15, 0, 0.0265], [0, -0.0018, 0.01634], [0, -0.0018, 0.01634], [0, 0, -0.001159]]
Denavit–Hartenberg parameters for UR10:
[Base, Upper Arm, Lower arm, Wrist 2, Wrist 3, Tool Mounting Bracket]
a = [0, -0.612, -0.5723, 0, 0, 0]
d = [0.1273, 0, 0, 0.163941, 0.1157, 0.0922]
alpha = [1.570796327, 0, 0, 1.570796327, -1.570796327, 0]
mass = [7.1, 12.7, 4.27, 2.000, 2.000, 0.365]
center_of_mass = [[0.021, 0, 0.027], [0.38, 0, 0.158], [0.24, 0, 0.068], [0.0, 0.007, 0.018], [0.0, 0.007, 0.018], [0, 0, -0.026]]














 1024
1024











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









