






ArcBall提供了一种旋转方法,使得用户可以通过鼠标操作来完成对三维物体的旋转,直观而方便。要想完成旋转,先求出表示旋转的单位四元数,然后转换为欧拉旋转角和旋转轴,即可表示旋转,因此,我们给定输入输出。
【输入】
原光标在屏幕上的二维坐标T1和旋转后光标停留的二维坐标T2
【输出】
三维旋转坐标轴V和旋转角度α
【几何原理】
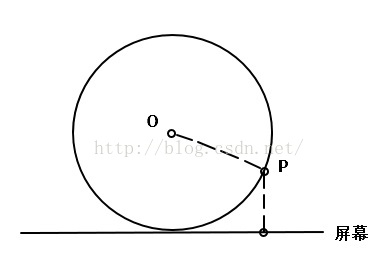
由于屏幕是二维的,无法直接表示旋转,可以通过辅助几何体来完成。想象在屏幕后面有一个球体,球体正好与这个屏幕相切,如下图的俯视图所示
我们在求旋转轴之前需要将二维坐标转化为三维向量OP,如下图,T为屏幕上的二维坐标,P为T向屏幕后方发出射线与球体相交的点。这里做作OM水平面平行于屏幕,P到水平线的深度z需要先行求得。
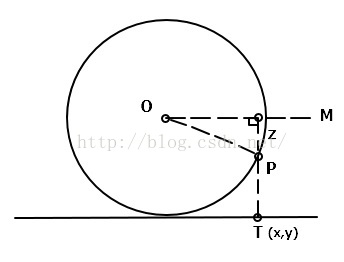
为了运算处理方便,我们需要将T坐标限定在[-1,1]之间,设定这个球体的半径为1。
x = 2*x / 屏幕宽度 - 1
y = -(2*y / 屏幕高度 - 1)
由勾股定理可知,z = sqrt(1-x*x-y*y)。
当x*x+y*y大于1时,P不在球体上,那就在OM上找一点P,且满足P在球体上,PT垂直于平面OM,即x*x+y*y大小限定在1这个值,z = 0
【流程】
x,y,z的值可以唯一确定OP向量,接下来,给定输入的两个坐标T1,T2,我们做出如下处理:
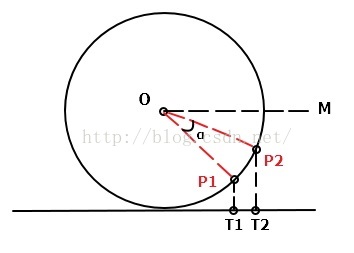
1. 分别求出T1和T2对应的三维向量OP1和OP2
2. s = OP1 · OP2,即先求两个向量的内积
3. v = OP1 × OP2,即求两个向量的外积
4. 记四元数q = [s, v],将其单位化,此时q为旋转四元数。
5. 旋转角α = 2arccos(q.s) ,旋转轴V = ( q.v / sqrt(1-q.s*q.s) )
输出求得。














 3807
3807











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









