







《Python源码阅读》之 内存管理机制1
@转载:py社区
Python的内存管理架构
_____ ______ ______ ________
[ int ] [ dict ] [ list ] ... [ string ] Python core |
+3 | <----- Object-specific memory -----> | <-- Non-object memory --> |
_______________________________ | |
[ Python's object allocator ] | |
**3层 特殊具体类型对象的内存**
+2 | ####### Object memory ####### | <------ Internal buffers ------> |
**2层 对象的内存**
______________________________________________________________ |
[ Python's raw memory allocator (PyMem_ API) ] |
+1 | <----- Python memory (under PyMem manager's control) ------> | |
**1层 PyMemery的API从底层OS调用。**
__________________________________________________________________
[ Underlying general-purpose allocator (ex: C library malloc) ]
0 | <------ Virtual memory allocated for the python process -------> |
**底层 C实现的内存管理的方法给上层调用。**
=========================================================================
_______________________________________________________________________
[ OS-specific Virtual Memory Manager (VMM) ]
-1 | <--- Kernel dynamic storage allocation & management (page-based) ---> |
**OS 内存管理**
__________________________________ __________________________________
[ ] [ ]
-2 | <-- Physical memory: ROM/RAM --> | | <-- Secondary storage (swap) --> |
** 物理内存ROM/RAM**补充
layer 3: Object-specific memory(int/dict/list/string....)
Python 实现并维护
更高抽象层次的内存管理策略, 主要是各类特定对象的缓冲池机制. 具体见前面几篇涉及的内存分配机制
layer 2: Python's object allocator
Python 实现并维护
实现了创建/销毁Python对象的接口(PyObject_New/Del), 涉及对象参数/引用计数等
layer 1: Python's raw memory allocator (PyMem_ API)
Python 实现并维护, 包装了第0层的内存管理接口, 提供统一的raw memory管理接口
封装的原因: 不同操作系统 C 行为不一定一致, 保证可移植性, 相同语义相同行为
layer 0: Underlying general-purpose allocator (ex: C library malloc)
操作系统提供的内存管理接口, 由操作系统实现并管理, Python不能干涉这一层的行为layer 1: PyMem_ API
PyMem_ API是对操作系统内存管理接口进行的封装
源文件:pymem.h
// Raw memory interface
// 这里存在三个宏定义, 宏可以避免一次函数调用的开销, 提高运行效率
// 不允许非配空间大小为0的内存空间
#define PyMem_MALLOC(n) ((size_t)(n) > (size_t)PY_SSIZE_T_MAX ? NULL \
: malloc((n) ? (n) : 1))
#define PyMem_REALLOC(p, n) ((size_t)(n) > (size_t)PY_SSIZE_T_MAX ? NULL \
: realloc((p), (n) ? (n) : 1))
#define PyMem_FREE free
// 这里做了三个函数的声明, 平台独立的 malloc/realloc/free
PyAPI_FUNC(void *) PyMem_Malloc(size_t);
PyAPI_FUNC(void *) PyMem_Realloc(void *, size_t);
PyAPI_FUNC(void) PyMem_Free(void *);
// ============================================================
// Type-oriented memory interface
// 这里还有三个类型相关的内存接口, 批量分配/重分配 n 个 类型为 type内存
#define PyMem_New(type, n) \
( ((size_t)(n) > PY_SSIZE_T_MAX / sizeof(type)) ? NULL : \
( (type *) PyMem_Malloc((n) * sizeof(type)) ) )
#define PyMem_NEW(type, n) \
( ((size_t)(n) > PY_SSIZE_T_MAX / sizeof(type)) ? NULL : \
( (type *) PyMem_MALLOC((n) * sizeof(type)) ) )
#define PyMem_Resize(p, type, n) \
( (p) = ((size_t)(n) > PY_SSIZE_T_MAX / sizeof(type)) ? NULL : \
(type *) PyMem_Realloc((p), (n) * sizeof(type)) )
#define PyMem_RESIZE(p, type, n) \
( (p) = ((size_t)(n) > PY_SSIZE_T_MAX / sizeof(type)) ? NULL : \
(type *) PyMem_REALLOC((p), (n) * sizeof(type)) )object.c中, 三个实现的函数调用了对应的宏
// 使用 C 写Python扩展模块时使用函数而不是对应的宏
void *
PyMem_Malloc(size_t nbytes)
{
return PyMem_MALLOC(nbytes);
}
void *
PyMem_Realloc(void *p, size_t nbytes)
{
return PyMem_REALLOC(p, nbytes);
}
void
PyMem_Free(void *p)
{
PyMem_FREE(p);
}Python 的内存分配策略
源码Objects/obmalloc.c
/*
* "Memory management is where the rubber meets the road -- if we do the wrong
* thing at any level, the results will not be good. And if we don't make the
* levels work well together, we are in serious trouble." (1)
*
* (1) Paul R. Wilson, Mark S. Johnstone, Michael Neely, and David Boles,
* "Dynamic Storage Allocation: A Survey and Critical Review",
* in Proc. 1995 Int'l. Workshop on Memory Management, September 1995.
*/Python引入了内存池机制, 用于管理对小块内存的申请和释放
逻辑
- 如果要分配的内存空间大于 SMALL_REQUEST_THRESHOLD bytes(512 bytes), 将直接使用layer 1的内存分配接口进行分配
- 否则, 使用不同的block来满足分配需求
整个小块内存池可以视为一个层次结构
- 内存池(概念上的, 标识Python对于整个小块内存分配和释放的内存管理机制)
- arena
- pool
- block
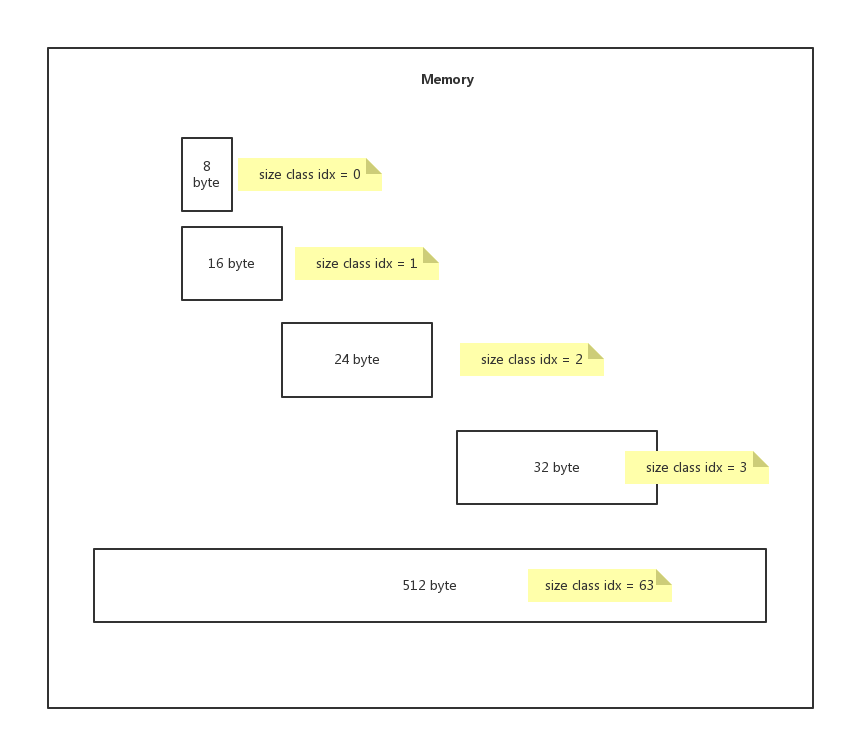
意思就是说为了保证内存对齐,我们必须是以8Bit为单位的分配内存。
比如你需要1-8bit 但是我们为了对齐内存只能分给你8bit。1个block。多余你用不完的Bit就浪费掉。
申请一块大小28字节的内存, 实际从内存中划到32字节的一个block (从size class index为3的pool里面划出)
最大是512bit 也就是63个block
pool
pool管理block, 一个pool管理着一堆有固定大小的内存块
本质: pool管理着一大块内存, 它有一定的策略, 将这块大的内存划分为多个大小一致的小块block内存.
pool size
在Python中, 一个pool的大小通常为一个系统内存页. 4kB
obmalloc.c
#define SYSTEM_PAGE_SIZE (4 * 1024)
#define SYSTEM_PAGE_SIZE_MASK (SYSTEM_PAGE_SIZE - 1)
#define POOL_SIZE SYSTEM_PAGE_SIZE /* must be 2^N */
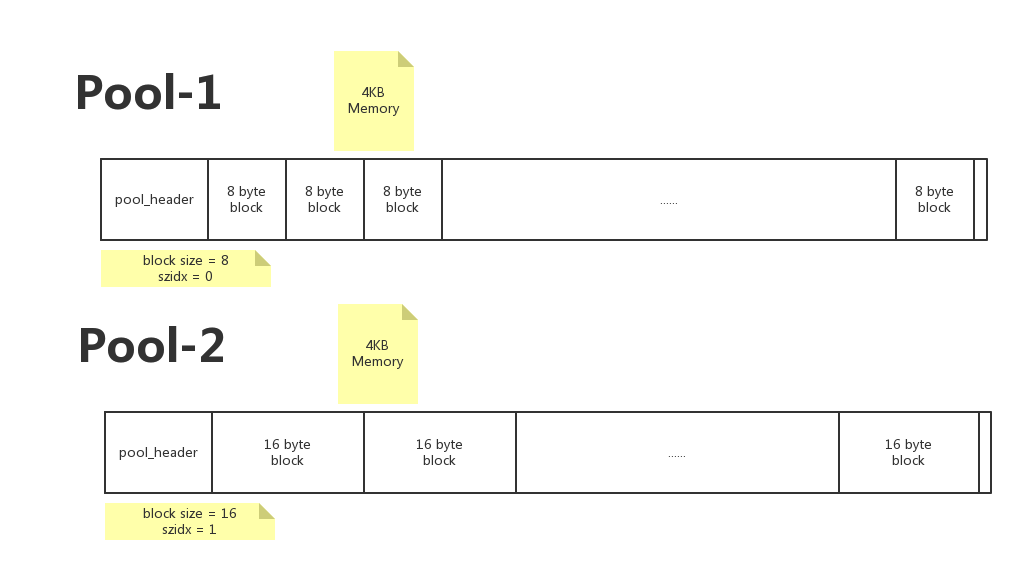
#define POOL_SIZE_MASK SYSTEM_PAGE_SIZE_MASKpool组成
pool的4kB内存 = pool_header + block集合(N多大小一样的block)
pool_header
/* Pool for small blocks. */
struct pool_header {
union { block *_padding;
uint count; } ref; /* number of allocated blocks */
block *freeblock; /* pool's free list head */
struct pool_header *nextpool; /* next pool of this size class */
struct pool_header *prevpool; /* previous pool "" */
uint arenaindex; /* index into arenas of base adr */
uint szidx; /* block size class index */ - size class index
uint nextoffset; /* bytes to virgin block */
uint maxnextoffset; /* largest valid nextoffset */
};pool_header的作用
- 与其他pool链接, 组成双向链表
- 维护pool中可用的block, 单链表
- 保存 szidx , 这个和该pool中block的大小有关系, (block size=8, szidx=0), (block size=16, szidx=1)…用于内存分配时匹配到拥有对应大小block的pool
- arenaindex, 后面说
pool初始化
从内存中初始化一个全新的空的pool
Objects/obmalloc.c的
void *
PyObject_Malloc(size_t nbytes)
{
...
init_pool:
// 1. 连接到 used_pools 双向链表, 作为表头
// 注意, 这里 usedpools[0] 保存着 block size = 8 的所有used_pools的表头
/* Frontlink to used pools. */
next = usedpools[size + size]; /* == prev */
pool->nextpool = next;
pool->prevpool = next;
next->nextpool = pool;
next->prevpool = pool;
pool->ref.count = 1;
// 如果已经初始化过了...这里看初始化, 跳过
if (pool->szidx == size) {
/* Luckily, this pool last contained blocks
* of the same size class, so its header
* and free list are already initialized.
*/
bp = pool->freeblock;
pool->freeblock = *(block **)bp;
UNLOCK();
return (void *)bp;
}
/*
* Initialize the pool header, set up the free list to
* contain just the second block, and return the first
* block.
*/
// 开始初始化pool_header
// 这里 size = (uint)(nbytes - 1) >> ALIGNMENT_SHIFT; 其实是Size class idx, 即szidx
pool->szidx = size;
// 计算获得每个block的size
size = INDEX2SIZE(size);
// 注意 #define POOL_OVERHEAD ROUNDUP(sizeof(struct pool_header))
// bp => 初始化为pool + pool_header size, 跳过pool_header的内存
bp = (block *)pool + POOL_OVERHEAD;
// 计算偏移量, 这里的偏移量是绝对值
// #define POOL_SIZE SYSTEM_PAGE_SIZE /* must be 2^N */
// POOL_SIZE = 4kb, POOL_OVERHEAD = pool_header size
// 下一个偏移位置: pool_header size + 2 * size
pool->nextoffset = POOL_OVERHEAD + (size << 1);
// 4kb - size
pool->maxnextoffset = POOL_SIZE - size;
// freeblock指向 bp + size = pool_header size + size
pool->freeblock = bp + size;
// 赋值NULL
*(block **)(pool->freeblock) = NULL;
UNLOCK();
return (void *)bp;
}未完














 806
806











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









