






舵机的控制一般需要一个20ms左右的时基脉冲,该脉冲的高电平部分一般为0.5ms-2.5ms范围内的角度控制脉冲部分,总间隔为2ms。以180°角度伺服为例,那么对应的控制关系是: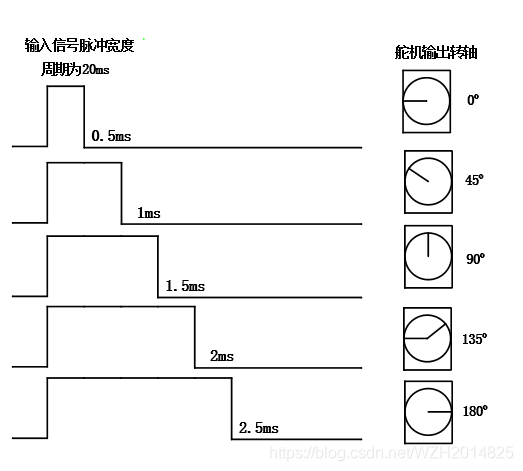
舵机转动0°代表它的占空比是2.5%,转动180°代表它的占空比是12.5%。
设arr(自动重装载值)为x时
转动角度所对应的值=(x+1)*(1-占空比)(将pwm极性设置为TIM_OCPolarity_High时)
转动角度所对应的值=(x+1)*占空比(将pwm极性设置为TIM_OCPolarity_Low时)
PWM信号的周期计算公式:
周期=(arr+1)*(psc+1)/CLK。其中CLK为计数器的时钟频率,不分频情况是72MHz。
这里我使用的是正点原子的STM32F103ZET6,程序也是在它的基础上改的。已经跑过了,舵机可以实现0-180°转动。
timer.c
#include "timer.h"
void TIM3_PWM_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitstruct;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);//改变相应的引脚号和时钟号,就能有不同的引脚PWM输出,此处是PA.7,TIM3_CH1没有重映射
//RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE); //是否启用重映射
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_7;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);
//GPIO_SetBits(GPIOA,GPIO_Pin_1);//初始为低电平,可有可无
//GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE);//是否启用重映射
TIM_TimeBaseInitstruct.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseInitstruct.TIM_CounterMode=TIM_CounterMode_Up;
TIM_TimeBaseInitstruct.TIM_Period=arr;
TIM_TimeBaseInitstruct.TIM_Prescaler=psc;
TIM_TimeBaseInit(TIM3,&TIM_TimeBaseInitstruct);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择 PWM 模式 2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性高
TIM_OC2Init(TIM3, &TIM_OCInitStructure); //初始化 TIM3 OC1
TIM_Cmd(TIM3, ENABLE);
TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable);
}
main.c
#include "stm32f10x.h"
#include "delay.h"
#include "timer.h"
int main()
{
u16 delay_time = 1000;
delay_init();
// NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
TIM3_PWM_Init(1999,719);//这里的arr的值和psc的值可以修改,只要在不分频情况下为72MHZ
while(1)
{
delay_ms(delay_time);
TIM_SetCompare2(TIM3, 1750); //对应180度
delay_ms(delay_time);
TIM_SetCompare2(TIM3, 1800); //对应135度
delay_ms(delay_time);
TIM_SetCompare2(TIM3, 1850); //对应90度
delay_ms(delay_time);
TIM_SetCompare2(TIM3, 1900);//对应45度
delay_ms(delay_time);
TIM_SetCompare2(TIM3, 1950); //对应0度
delay_ms(delay_time);
}
}
第一次写博客,记录自己的学习过程,希望能一直进步。














 1284
1284











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









