







自学教材:先进PID控制 MATLAB仿真-刘金琨
这本教材里面不仅有各PID方法的讲解,还有配套MATLAB程序,很适合自学。而且教材没有拘泥于理论讲解,是工程实用型的。
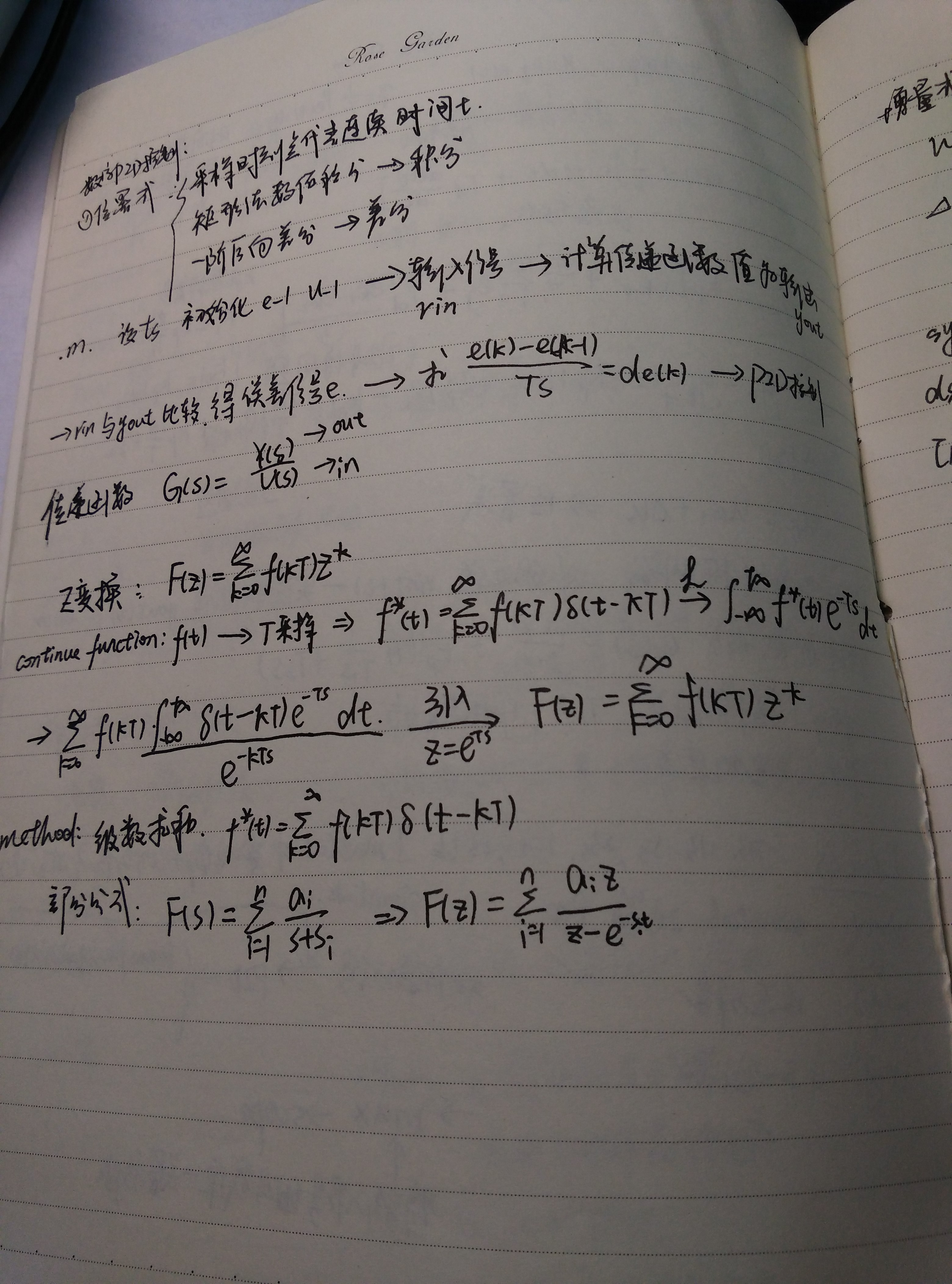
概念:PID是一种线性控制器,根据给定期望值和输出的偏差来调整控制系统。
主要分为三个部分:
比例:成比例的反映控制系统的偏差信号
积分:消除静差,提高系统的无差度,与积分时间常数有关
微分:偏差信号的变化速率
实际仿真PID一般通过三种方式(MATLAB平台):simulink 工具箱;利用状态方程编写M文件;利用S-函数编写M文件
分类叙述:
- 位置式PID
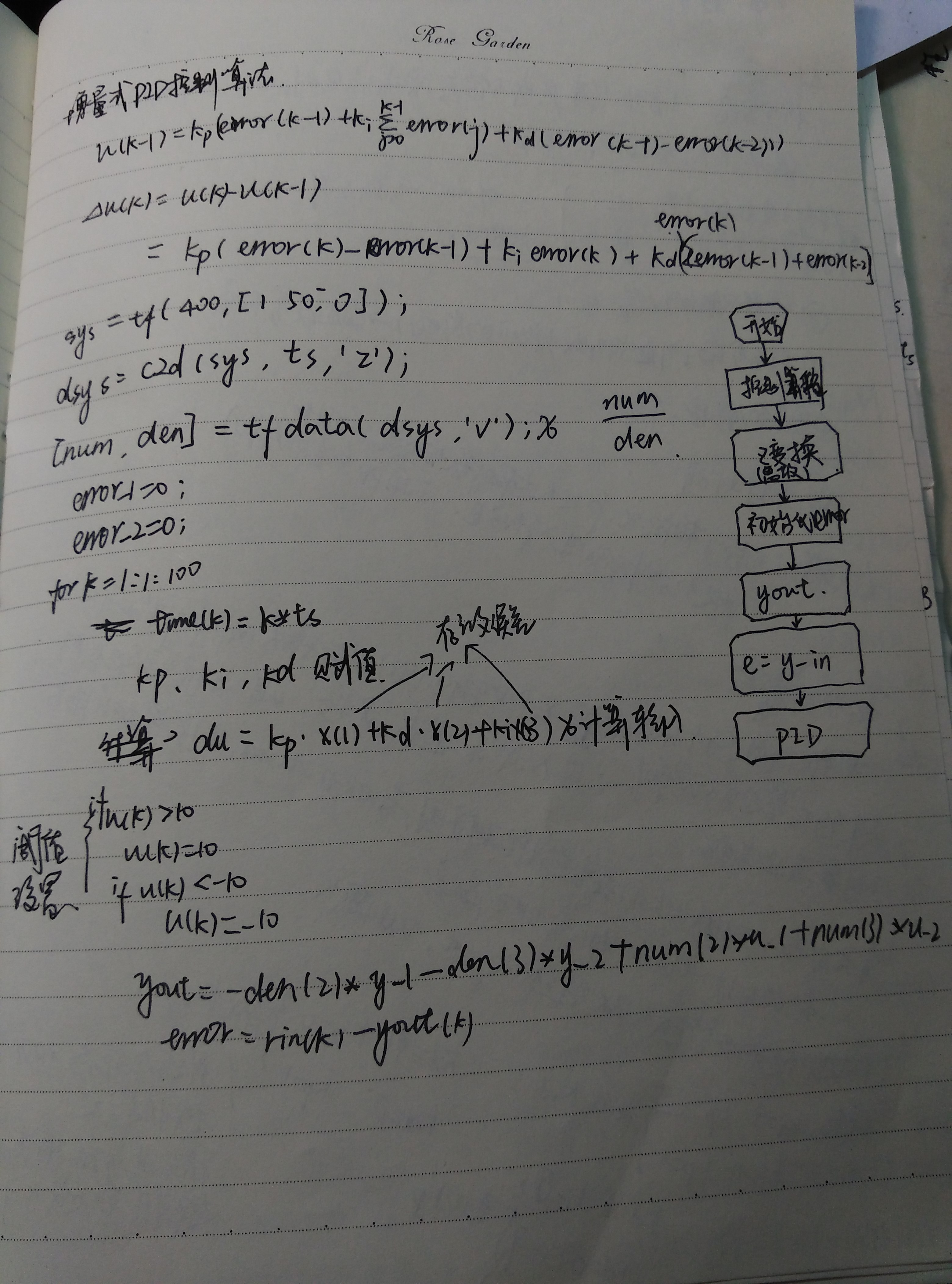
- 增量式PID
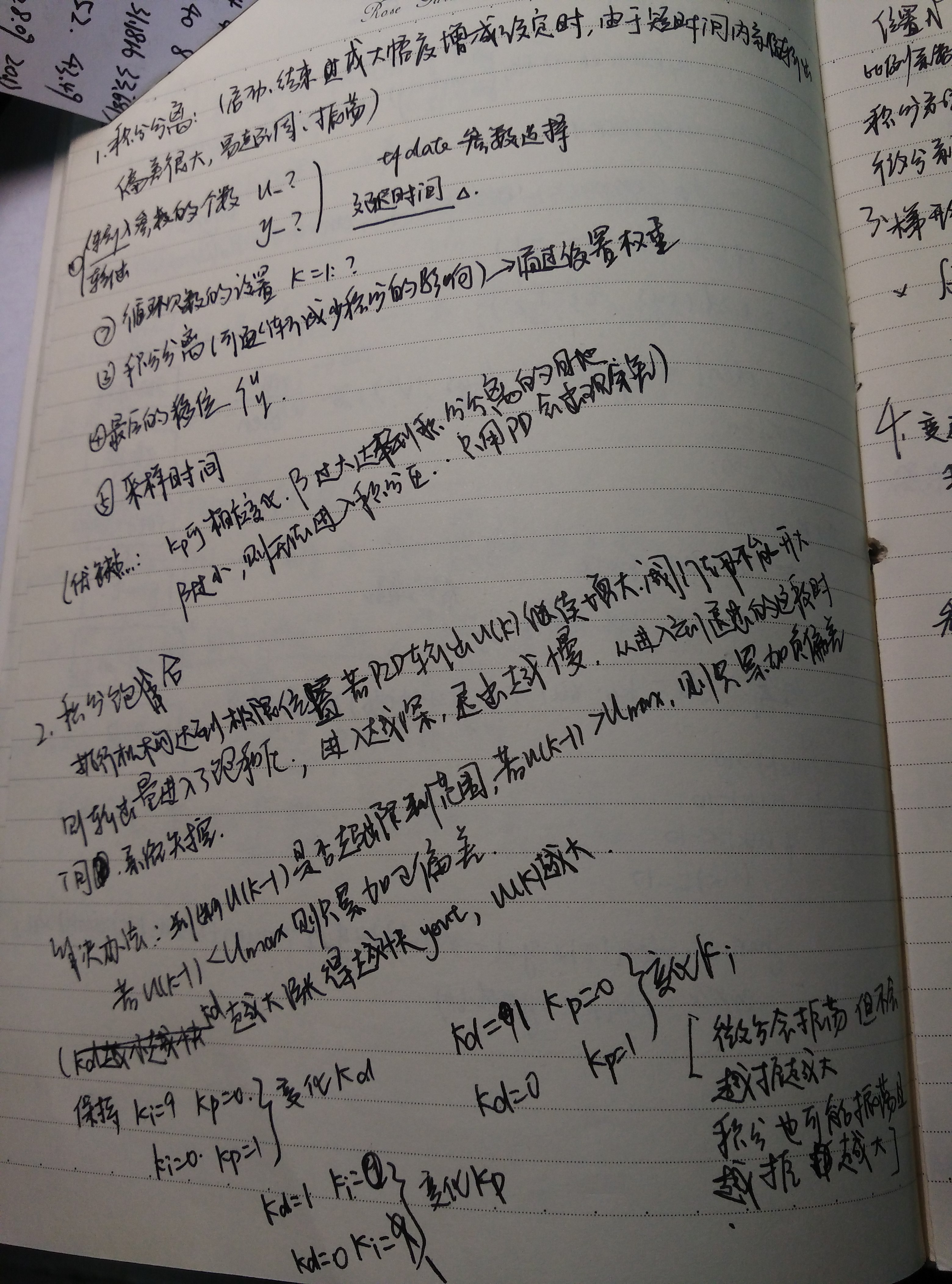
- 积分分离和积分饱和式PID
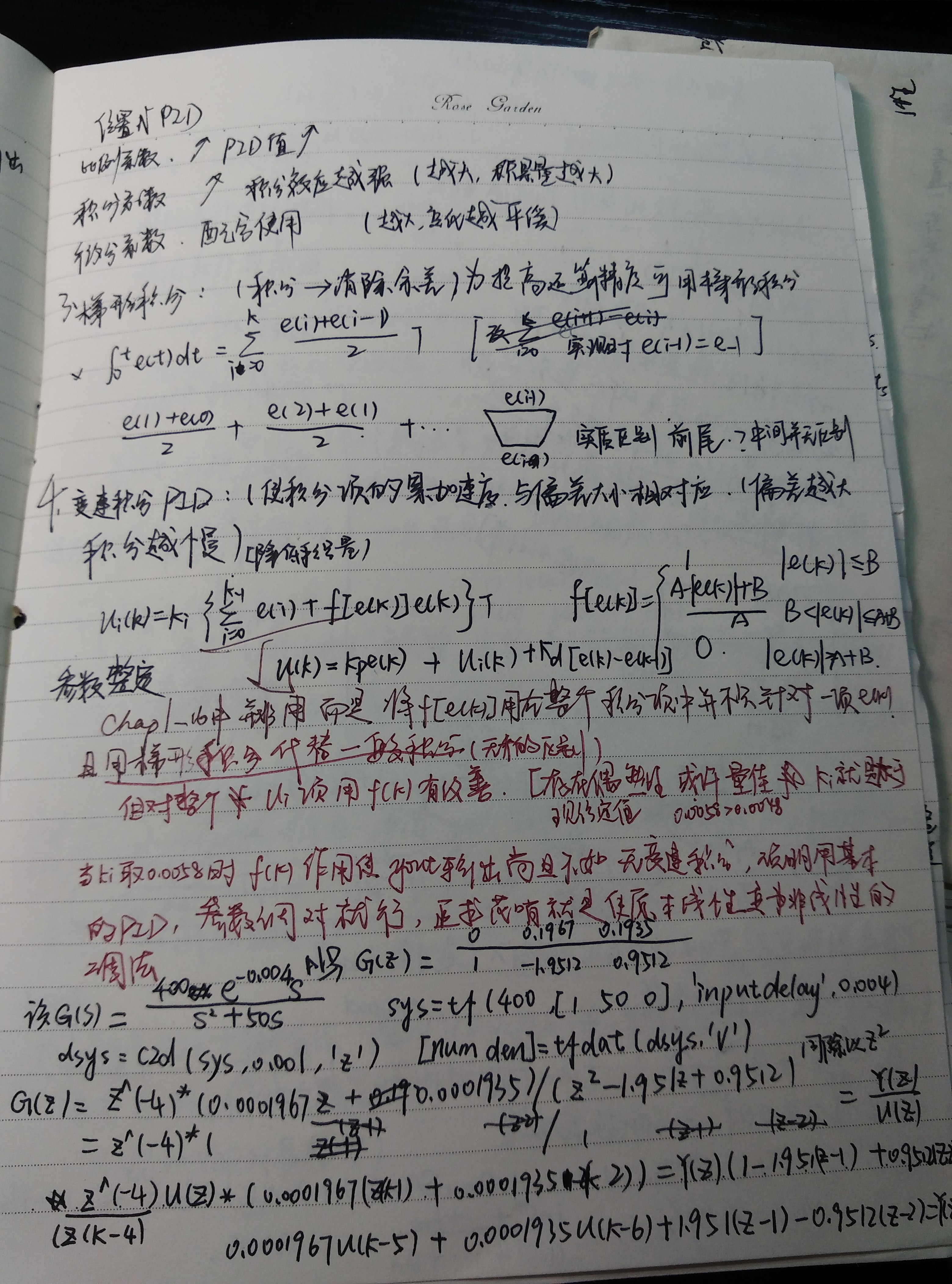
- 位置式,梯形积分式,变速积分式PID
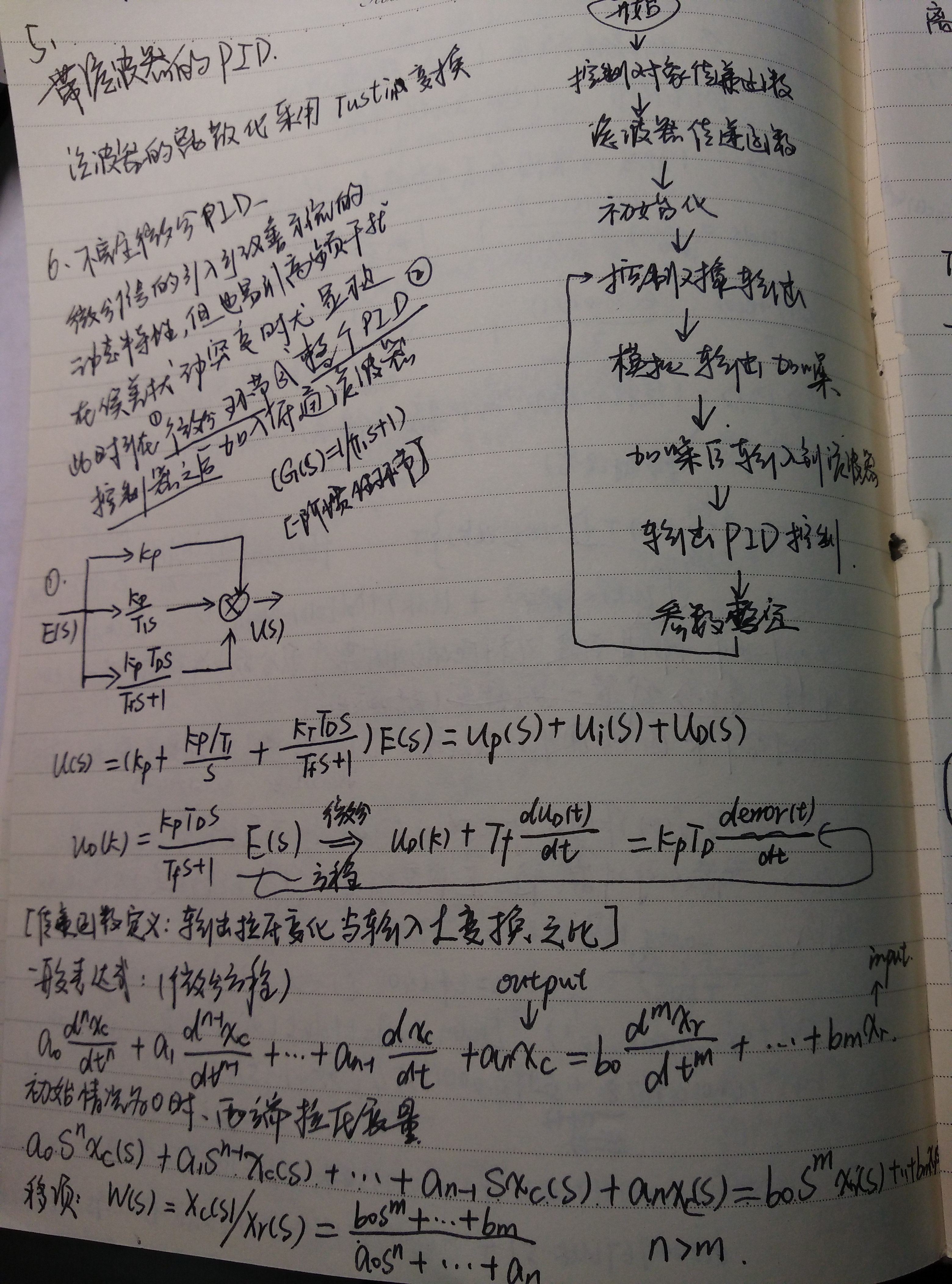
- 带滤波器的,不完全微分式PID
- 微分先行,带死区
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 3366
3366











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











