







在淘宝内网里看到同事发了贴说了一个CPU被100%的线上故障,并且这个事发生了很多次,原因是在Java语言在并发情况下使用HashMap造成Race Condition,从而导致死循环。这个事情我4、5年前也经历过,本来觉得没什么好写的,因为Java的HashMap是非线程安全的,所以在并发下必然出现问题。但是,我发现近几年,很多人都经历过这个事(在网上查“HashMap Infinite Loop”可以看到很多人都在说这个事)所以,觉得这个是个普遍问题,需要写篇疫苗文章说一下这个事,并且给大家看看一个完美的“Race Condition”是怎么形成的。
问题的症状
从前我们的Java代码因为一些原因使用了HashMap这个东西,但是当时的程序是单线程的,一切都没有问题。后来,我们的程序性能有问题,所以需要变成多线程的,于是,变成多线程后到了线上,发现程序经常占了100%的CPU,查看堆栈,你会发现程序都Hang在了HashMap.get()这个方法上了,重启程序后问题消失。但是过段时间又会来。而且,这个问题在测试环境里可能很难重现。
我们简单的看一下我们自己的代码,我们就知道HashMap被多个线程操作。而Java的文档说HashMap是非线程安全的,应该用ConcurrentHashMap。
但是在这里我们可以来研究一下原因。
Hash表数据结构
我需要简单地说一下HashMap这个经典的数据结构。
HashMap通常会用一个指针数组(假设为table[])来做分散所有的key,当一个key被加入时,会通过Hash算法通过key算出这个数组的下标i,然后就把这个<key, value>插到table[i]中,如果有两个不同的key被算在了同一个i,那么就叫冲突,又叫碰撞,这样会在table[i]上形成一个链表。
我们知道,如果table[]的尺寸很小,比如只有2个,如果要放进10个keys的话,那么碰撞非常频繁,于是一个O(1)的查找算法,就变成了链表遍历,性能变成了O(n),这是Hash表的缺陷(可参看《Hash Collision DoS 问题》)。
所以,Hash表的尺寸和容量非常的重要。一般来说,Hash表这个容器当有数据要插入时,都会检查容量有没有超过设定的thredhold,如果超过,需要增大Hash表的尺寸,但是这样一来,整个Hash表里的无素都需要被重算一遍。这叫rehash,这个成本相当的大。
相信大家对这个基础知识已经很熟悉了。
HashMap的rehash源代码
下面,我们来看一下Java的HashMap的源代码。
Put一个Key,Value对到Hash表中:
检查容量是否超标
新建一个更大尺寸的hash表,然后把数据从老的Hash表中迁移到新的Hash表中。
迁移的源代码,注意高亮处:
好了,这个代码算是比较正常的。而且没有什么问题。
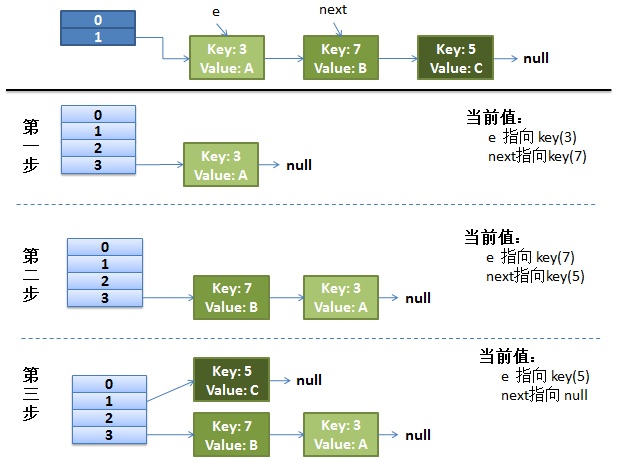
正常的ReHash的过程
画了个图做了个演示。
- 我假设了我们的hash算法就是简单的用key mod 一下表的大小(也就是数组的长度)。
- 最上面的是old hash 表,其中的Hash表的size=2, 所以key = 3, 7, 5,在mod 2以后都冲突在table[1]这里了。
- 接下来的三个步骤是Hash表 resize成4,然后所有的<key,value> 重新rehash的过程
并发下的Rehash
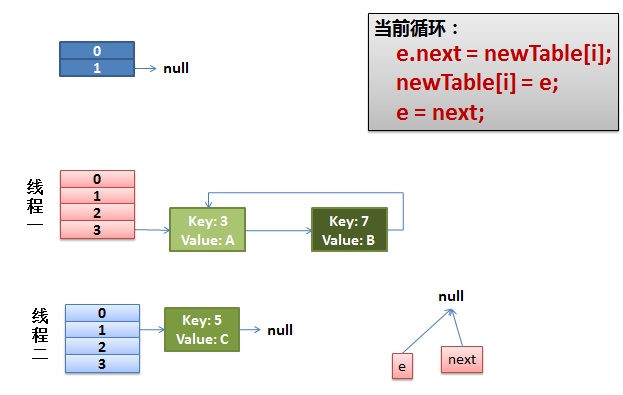
1)假设我们有两个线程。我用红色和浅蓝色标注了一下。
我们再回头看一下我们的 transfer代码中的这个细节:
而我们的线程二执行完成了。于是我们有下面的这个样子。
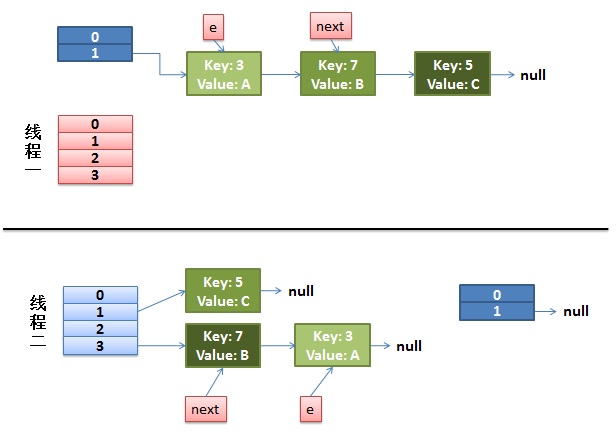
注意,因为Thread1的 e 指向了key(3),而next指向了key(7),其在线程二rehash后,指向了线程二重组后的链表。我们可以看到链表的顺序被反转后。
2)线程一被调度回来执行。
- 先是执行 newTalbe[i] = e;
- 然后是e = next,导致了e指向了key(7),
- 而下一次循环的next = e.next导致了next指向了key(3)
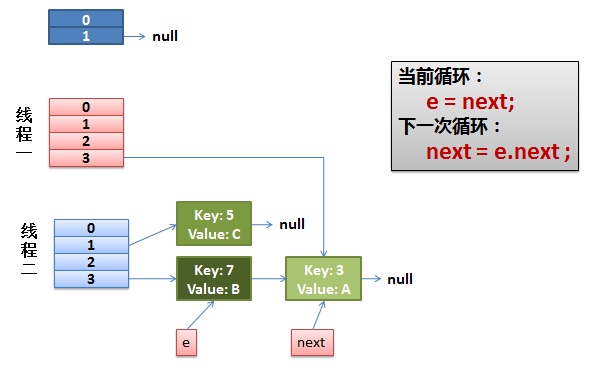
3)一切安好。
线程一接着工作。把key(7)摘下来,放到newTable[i]的第一个,然后把e和next往下移。
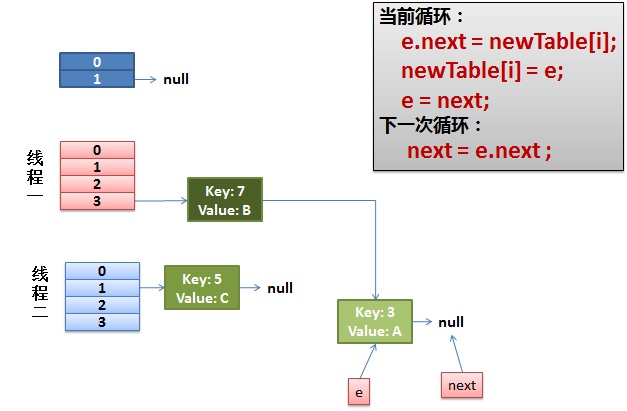
4)环形链接出现。
e.next = newTable[i] 导致 key(3).next 指向了 key(7)
注意:此时的key(7).next 已经指向了key(3), 环形链表就这样出现了。
于是,当我们的线程一调用到,HashTable.get(11)时,悲剧就出现了——Infinite Loop。
其它
有人把这个问题报给了Sun,不过Sun不认为这个是一个问题。因为HashMap本来就不支持并发。要并发就用ConcurrentHashmap
http://bugs.sun.com/bugdatabase/view_bug.do?bug_id=6423457
我在这里把这个事情记录下来,只是为了让大家了解并体会一下并发环境下的危险。
参考:http://mailinator.blogspot.com/2009/06/beautiful-race-condition.html
(全文完)















 638
638

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









