






在网上找关于dsp28335移相寄存器的配置问题,找了好多还是没有百度到现在这个问题终于解决了于是吧关于epwm的配置贴到这里,具体配置看图
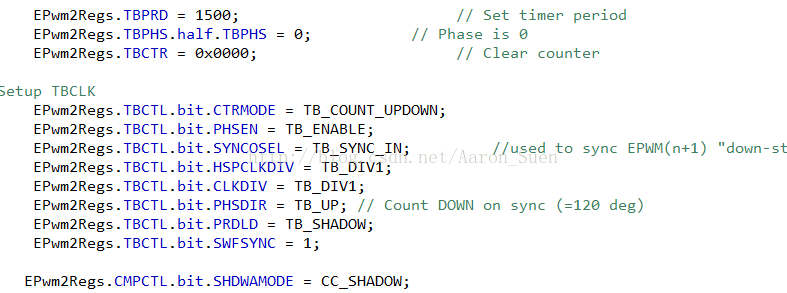
这就是具体的配置过程,主要是PHSEN寄存器使能 EPwm2Regs.TBCTL.bit.PHSEN = TB_ENABLE;,还有 EPwm2Regs.TBCTL.bit.SWFSYNC =
1; EPwm2Regs.TBCTL.bit.PRDLD = TB_SHADOW;这些寄存器配置相当的关键。还有就是在定时器中断中使用移相寄存器的时候,需要调用移相寄存器的时候与要用到这两
个移相寄存器
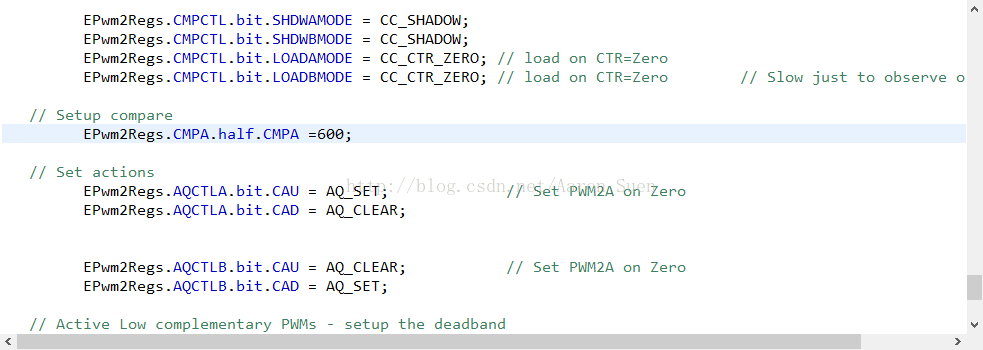
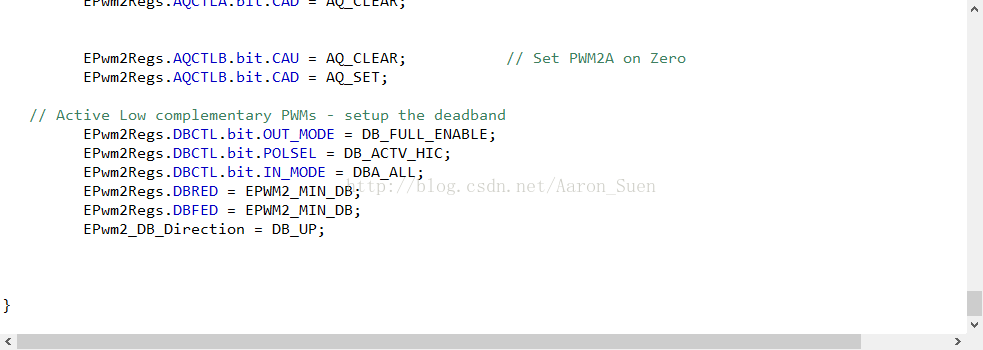
如果不写入下面这个寄存器的话,不会发生移相。
最终经过移相逆变后的实验波形如图
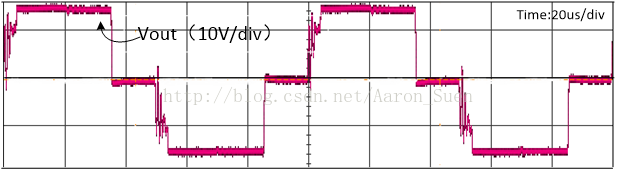
具体配置看https://blog.csdn.net/Aaron_Suen/article/details/84932812是ADC采集电压电流,定时器中断函数实现双闭环。
2.模糊自适应PID 控制算法
为了摆脱经典PID 算法中各种因素之间的相互影响,可以把比例、积分和微分作用分别用比例因子P、积分因子I和微分因子 D 表示,相互之间没有关联,互不影响。运算公式如下:
△u(n)=P*[e(n)―e(n-1)]+1/I*e(n)*Kii+D*[e(n)―2*e(n-1)+e(n-2)]
其 中 :
P、I 和 D 分别是比例因子、积分因子和微分因子,K i i 是积分作用强度因子 其中:A 为偏差限值。即当偏差绝对值|e|从接近A到A/2方向,积分作用从0.2~100% 逐步增强。
当偏差 |e|>A 时,积分不完全起作用 。与经典 PID 算法相比,比例因子 P、积分因子I和微分因子D的作用与比例系数Kp、积分时间Ti 和微分时间Td 的作用相似,P 值越大,比例作用越强,P 值越小,比例作用越弱;I 越小,积分作用越强,I 值越大积分作用越弱;D 值越大,微分作用越强,D 值越小,微分作用越弱。但有明显不同:⑴ 比例因子P、积分因子I和微分因子
⑵ 积分因子I和微分因子D与积分时间Ti和微分时间Td的数值差别很大,不能根据经验进行设置;
⑶ 积分作用强度因子Kii与偏差有关,具有模糊自适应能力,能够根据偏差的大小自动调节积分作用的强弱。根据偏差的大小和性质建立模糊控制规则。当偏差大或较大时,增强控制作用,以尽快消除偏差;当偏差较小时,减少控制作用,以减少因测量误差引起的波动 。
设△T1= 量程*1.0%
设△T2= 量程*0.25%
当偏差|e|在△T1~A之间和|e|>A时,按照公式计算。当偏差|e|在△T1~△T2之间时,增加 P、I 作用,减弱 D 作用,PID 参数做
以下修正:
P’=P*(1+(|e|-△T2)/(△T1-△T2)*c1)
I’=I*(1-(|e|-△T2)/(△T1-△T2)*c2)
D’= D*(1-(|e|- △T2)/(△T1- △T2)*c3)
以新的 P ’、I ’和 D ’代替 P 、I和 D 参与公式计算。
系数c1、c2、c3与偏差∣e∣在△T1~△T2之间的次数有关,范围为0.05~0.50。当偏差|e|在0~△T2之间时,减弱各调节作用,P I D 参数做以下修正:
P’=P*(1+(|e|-△T2)/△T2*0.20)
I’=I*(1-(|e|-△T2)/△T2*0.10)
D’= D*(1+(|e|-△T2)/△T2*0.20)
当偏差|e| 在0~△T1 之间发生振荡时,根据振荡特性自动在±0.25范围内修改 P 、I 、D 参数。
其控制流程。首先根据经验缺点比例因子P、积分因子I和微分因子D 的初值,设置偏差限值△T1、△T2 和A,假设设定值为 r,测量值为 y ,初始化e(n-1)=0,e(n-2)=0,然后计算偏差e(n)=r n -y n ,根据偏差e(n)大小,利用公式自动计算Kii和调整P、I和D的值,计算PID 输出。如果采样周期到,进入下一个循环重新计算。
程序中具体实现如下:
Fuzzy_pid.E0 = V_Set - V_Now ;
if( Fuzzy_pid.E0<= Fuzzy_pid.A /2)
Fuzzy_pid.Kii = 1;
else
Fuzzy_pid.Kii = 1-0.8*(2*fabss(Fuzzy_pid.E0)-Fuzzy_pid.A)/Fuzzy_pid.A;
if(Fuzzy_pid.E0 >=Fuzzy_pid.T2&&Fuzzy_pid.E0 <=Fuzzy_pid.T1 )
{
Fuzzy_pid.P1 = Fuzzy_pid.P*(1+(fabss(Fuzzy_pid.E0)-Fuzzy_pid.T2)/
(Fuzzy_pid.T1-Fuzzy_pid.T2)*Fuzzy_pid.C1);
Fuzzy_pid.I1 = Fuzzy_pid.I*(1-(fabss(Fuzzy_pid.E0)-Fuzzy_pid.T2)/
(Fuzzy_pid.T1-Fuzzy_pid.T2)*Fuzzy_pid.C2);
Fuzzy_pid.D1 = Fuzzy_pid.D*(1-(fabss(Fuzzy_pid.E0)-Fuzzy_pid.T2)/
(Fuzzy_pid.T1-Fuzzy_pid.T2)*Fuzzy_pid.C3);
Fuzzy_pid.P = Fuzzy_pid.P1;
Fuzzy_pid.I = Fuzzy_pid.I1;
Fuzzy_pid.D = Fuzzy_pid.D1;
}
Fuzzy_pid.SUM+=
Fuzzy_pid.P*(Fuzzy_pid.E0-Fuzzy_pid.E1)+
1/Fuzzy_pid.I*Fuzzy_pid.E0*Fuzzy_pid.Kii+
Fuzzy_pid.D*(Fuzzy_pid.E0-2*Fuzzy_pid.E1+Fuzzy_pid.E2);
















 396
396











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











