







分水岭分割算法
分水岭分割算法的定义网上随便百度一下就可以知道了,我就说一下我的理解,有不对的希望大家也可以帮忙指正。
对于分水岭分割,我的理解是,一幅图像是由不同大小的灰度级像素值构成的,可以把不同的大小想象成不同高度的山脉,接着在地表(就是从像素灰度级0开始)向这个山脉地脉注入水,那么当一个山脉与另一个山脉将要融合的线上就是图像的边界,当水注入最高山脉后形成的现象就是整幅图的边界。
cv2.watershed(参数1,参数2)Python中的分水岭分割算法有两个参数,第一个参数是带分割的图像,且为8位三通道彩色图像,第二个参数的掩码,第二个参数必须是32位单通道的图像。下面是完整代码,在使用分水岭分割算法之前的步骤是为了获取掩码图像
import cv2
import numpy as np
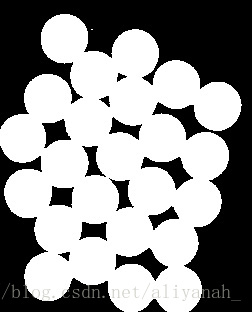
img=cv2.imread(r'D:\Python Code\waterSgmention\water_coins.jpg')
cv2.imshow('img',img)
#将图像转化为灰度图像
gray=cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
#阈值化处理
ret,thresh=cv2.threshold(gray,0,255,cv2.THRESH_BINARY_INV+cv2.THRESH_OTSU)
cv2.imshow('thresh',thresh)
#noise removal
#opening operator是先腐蚀后膨胀,可以消除一些细小的边界,消除噪声
kernel=np.ones((3,3),np.uint8)
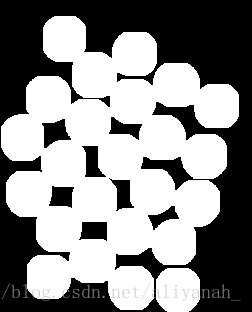
opening=cv2.morphologyEx(thresh,cv2.MORPH_OPEN,kernel,iterations=2)
cv2.imshow('opening',opening)二值化后由于图像存在一些噪声(即白色的点),可以用形态学的开操作的处理。opening操作可以消除物体之间细小的粘缝,为了展示openin操作的效果,我将内核设置为5*5,并且迭代了5次,其效果如下:
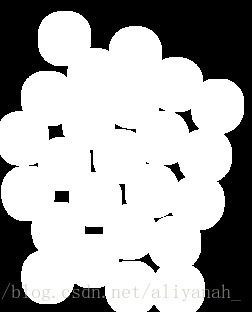
获得掩码需要知道图像的前景和背景,在这里我的理解是:前景就是有硬币的图像,背景就是除硬币之前的区域。我们要确保我们获得的背景图中不包含前景图的区域,通过腐蚀操作,将硬币的区域放大,那么剩下的就一定是背景区域了,即可以确定背景图
#sure background area
sure_bg=cv2.dilate(opening,kernel,iterations=3)
cv2.imshow('bg',sure_bg)背景图效果
如上所说,确定前景,就是硬币的区域
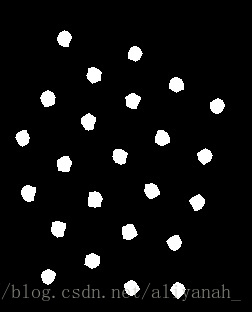
距离变化 可用来实现目标细化、骨架提取、形状插值及匹配、粘连物体的分离等。距离变换是针对二值图像的一种变换。在二维空间中,一幅二值图像可以认为仅仅包含目标和背景两种像素,目标的像素值为1,背景的像素值为0;距离变换的结果不是另一幅二值图像,而是一幅灰度级图像,即距离图像,图像中每个像素的灰度值为该像素与距其最近的背景像素间的距离(就是原二值图像中像素值为1的像素点与最近的像素点为0的像素点之间的距离)
由于掩码是一幅二值图像,所以经过距离变化后还需要将图像进行二值化
这样子的结果图像中像素点为1的区域就一定是硬币的位置,即前景图
#finding sure foreground area
dist_transfrom=cv2.distanceTransform(opening,cv2.DIST_L2 ,5)
#cv2.imshow('dist_transfrom',dist_transfrom)
ret,sure_fg=cv2.threshold(dist_transfrom,0.7*dist_transfrom.max(),255,0)
cv2.imshow('sure_fg',sure_fg)前景图效果
现在我们已经知道原图像的前景图和背景图了,但是还有一些区域是我们所不知道的就是原图像中硬币与硬币之间相连的那些或者叠加的区域,即边界,通过背景图减去前景图可以大概的获得这些未知的边界
#finding unknow region
sure_fg=np.uint8(sure_fg)
unknow=cv2.subtract(sure_bg,sure_fg) #背景-前景
cv2.imshow('unknow',unknow)
官网上说connectedComponents函数可以使图像中标记背景像素点为0,飞背景像素点从1开始累加分别标记
ret,maker=cv2.connectedComponents(sure_fg)
maker=maker+1
maker[unknow==255]=0最终使用分水岭分割算法
maker = cv2.watershed(img,maker)
cv2.imshow('maker',maker)
img[maker == -1] = [0,0,255]
cv2.imshow('result',img)在经过分水岭分割算法后,边界处会标记为-1

这里面有几个点我还没有很清楚的理解,等后续理解了再来更新
官网参考文献














 3079
3079











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









