







1.0 什么是卡尔曼模型
理论推导过于复杂,看个知乎上的解释吧
假设你有两个传感器,测的是同一个信号。可是它们每次的读数都不太一样,怎么办?
取平均。
再假设你知道其中贵的那个传感器应该准一些,便宜的那个应该差一些。那有比取平均更好的办法吗?
加权平均。
怎么加权?假设两个传感器的误差都符合正态分布,假设你知道这两个正态分布的方差,用这两个方差值,(此处省略若干数学公式),你可以得到一个“最优”的权重。
接下来,重点来了:假设你只有一个传感器,但是你还有一个数学模型。模型可以帮你算出一个值,但也不是那么准。怎么办?
把模型算出来的值,和传感器测出的值,(就像两个传感器那样),取加权平均。
OK,最后一点说明:你的模型其实只是一个步长的,也就是说,知道x(k),我可以求x(k+1)。问题是x(k)是多少呢?答案:x(k)就是你上一步卡尔曼滤波得到的、所谓加权平均之后的那个、对x在k时刻的最佳估计值。
于是迭代也有了。
这就是卡尔曼滤波。
作者:Kent Zeng
链接:https://www.zhihu.com/question/23971601/answer/26254459
来源:知乎
著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
总而言之,kalman滤波用在当测量值与模型预测值均不准确的情况下,用来计算预测真值的一种滤波方法。这在目标识别与追踪任务中经常用到。
2.0 Python实战–2维位置跟踪
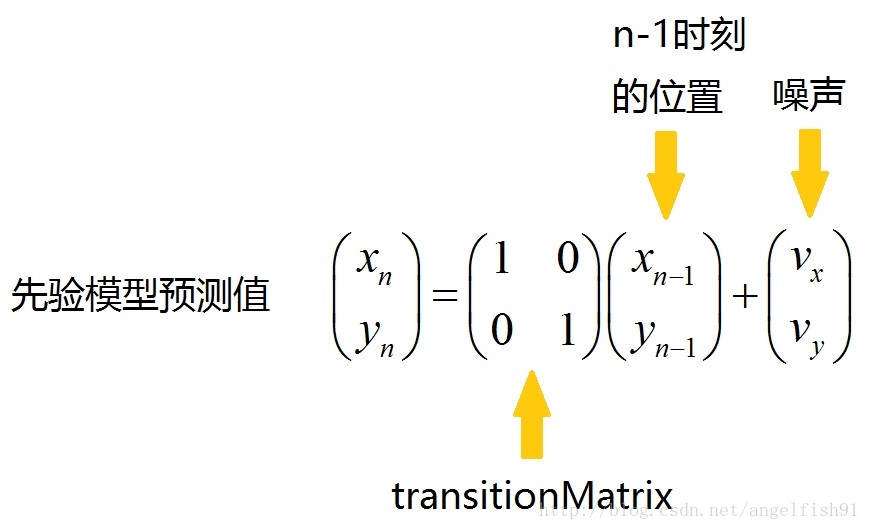
在这个例子中,我们知道2维位置测量值mes_x,mes_y。并且我们的先验模型预测值为model_x,model_y。我们通过kalman filter来预测真值的大小。首先来建立2维运动追踪模型,即上的model。在这个例子中,我们的model位置预测值设定为n时刻的位置由n-1时刻的位置加上一个随机噪声决定,如下图所示。
python 程序如下
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 656
656











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









