







上传技术博客真的挺费时间的,不过为了广大的同胞们能节省更多的时间,自己通过学习书籍《学习opencv》和书籍《机器视觉算法与应用》中有关摄像机标定的内容,现在就在这里总结了一下,方便大家参考。不足之处,大家体谅。毕竟是花费了大半天时间总结的。希望大家多多转发,请标出文章出处。谢谢
摄像机标定
1.首先先了解一下摄像机标定的概念及其作用。
1.1概念:摄像机标定:是确定摄像机内参和外参的过程、是准确测量目标物体的必要过程。每个镜头的畸变程度各不相同,通过摄像机标定就可以校正这种镜头畸变。另外在摄像机标定后就可以得到在世界坐标系中目标物体米制单位(即坐标系是以米或者毫米等为单位)的坐标。摄像机标定的重要性还在于它是摄像机测量与真实三维世界测量的联系桥梁,场景不仅仅是三维的,也是用物理单位度量的空间。因此,摄像机的自然单位(像素)和物理世界的单位(米)的关系对三维场景的重构至关重要。
1.2:在谈及具体的摄像机标定过程前,我们先了解一下摄像机标定过程中所需要的相关基础知识点,比如:所使用的摄像机模型,各种坐标系以及坐标系之间的相互转换、
1.2.1摄像机模型:为了标定摄像机,我们有必要建立一个模型,该摄像机由摄像机、镜头和图像采集卡(这个不用管,如果使用则需要)组成,该模型可以将世界坐标系中三维空间点投影到二维图像中。在机器视觉应用中常用的有两种不同类型的镜头:普通镜头和远心镜头,这里我们只讲解普通镜头。使用普通镜头时,世界坐标系到图像坐标系的投影为透视投影;我们将摄像机与普通镜头的组合称为针孔摄像机模型。
在这你一定会对透视投影感到疑惑,不用着急,下面就介绍什么是透视投影。
透视投影是使用中心投影法,沿着一系列最终汇聚到一个被称为投影中心的点的投影线,将三维世界中的点投影变换到二维图像平面中。
对于摄像机模型,从三维图像坐标的映射关系都可以使用一个固定数量的参数来表示:P=π(Pw,c1,c2,…,cn)上式中,p是三维空间点Pw通过投影π得到的二维图像坐标。摄像机标定就是确定摄像机参数c1,…,cn的过程。
2.下面讲解针孔摄像机的概念
针孔摄像机模型。针孔是一堵想象中的墙(中心有一个微型小孔)。光线只能从这个开口中通过,而其余的都被墙所阻挡。下面我们将从一个针孔摄像机模型开始,处理基本几何中的投影射线。遗憾的是,真实的针孔由于不能快速曝光收集足够的光线,因此他不是一个得到图像的好方法。这也是为什么眼睛和摄像机都要使用透镜而不是仅仅只用一个点来收集更多光线的原因。然而,这种利用透镜得到更多光线的缺点是,不仅使我们背离了所使用的简单针孔几何模型,而且引入来自透镜的畸变。
2.1针孔摄像机模型
摄像机中最简单的针孔模型。f是摄像机的焦距,Z是摄像机到物体的距离,X是物体的长度,x是图像平面上的物体图像,可以得到-x/f=X/Z.下面是针孔模型图:
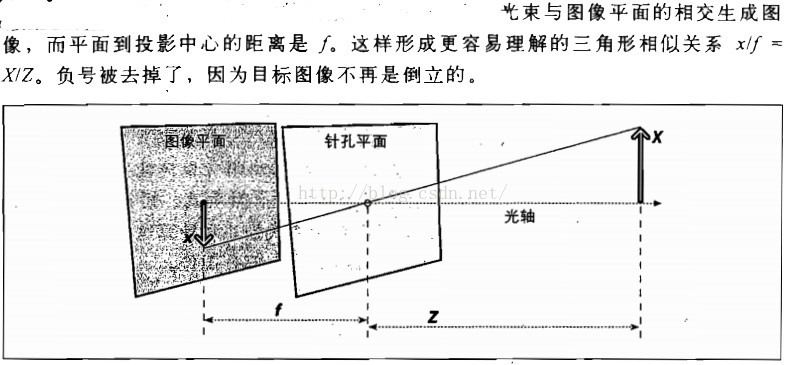
重新把针孔摄像机模型整理为另外一种等价形式,目的是为了使得其数学形式更简单一些。我们交换上图中的针孔和图像平面。此时,针孔中的点被理解为投影中心。这样,每一条光线,从远处物体的某个点出发,到达投影平面的中心。光轴与图像平面的交点被称为主点。如图所示:
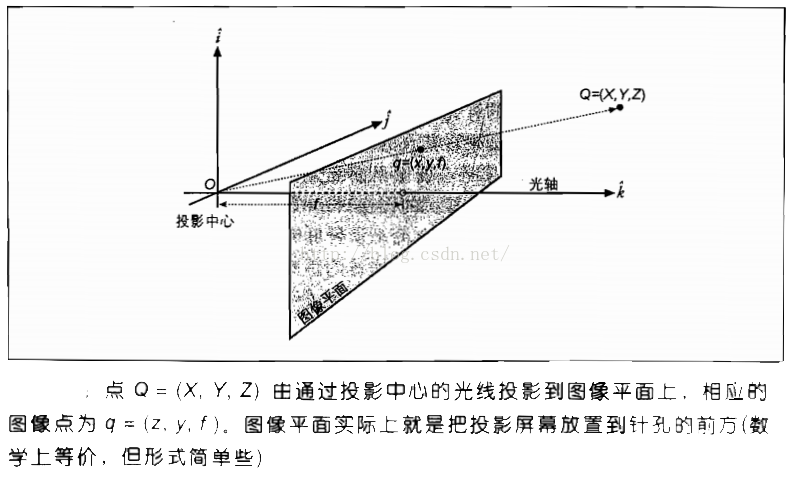
上图以投影中心为坐标原点表明此为摄像机坐标系
中间插一段:介绍针孔摄像机中几个常用的参数:
光轴:从投影中心出发垂直于图像平面的轴为光轴,同时光轴也是摄像机坐标系中的z轴。
主点:光轴与图像平面的交点为主点(换句话来说就是从投影中心O作垂直于图像平面的垂直线,垂线与该平面的交点即为主点)。
焦距f:投影中心到主点的距离
摄像机标定过程中需要四个坐标系:世界坐标系(WCS)摄像机坐标系(CCS) 成像平面坐标系(IPCS) 图像坐标系(ICS).如下图所示:
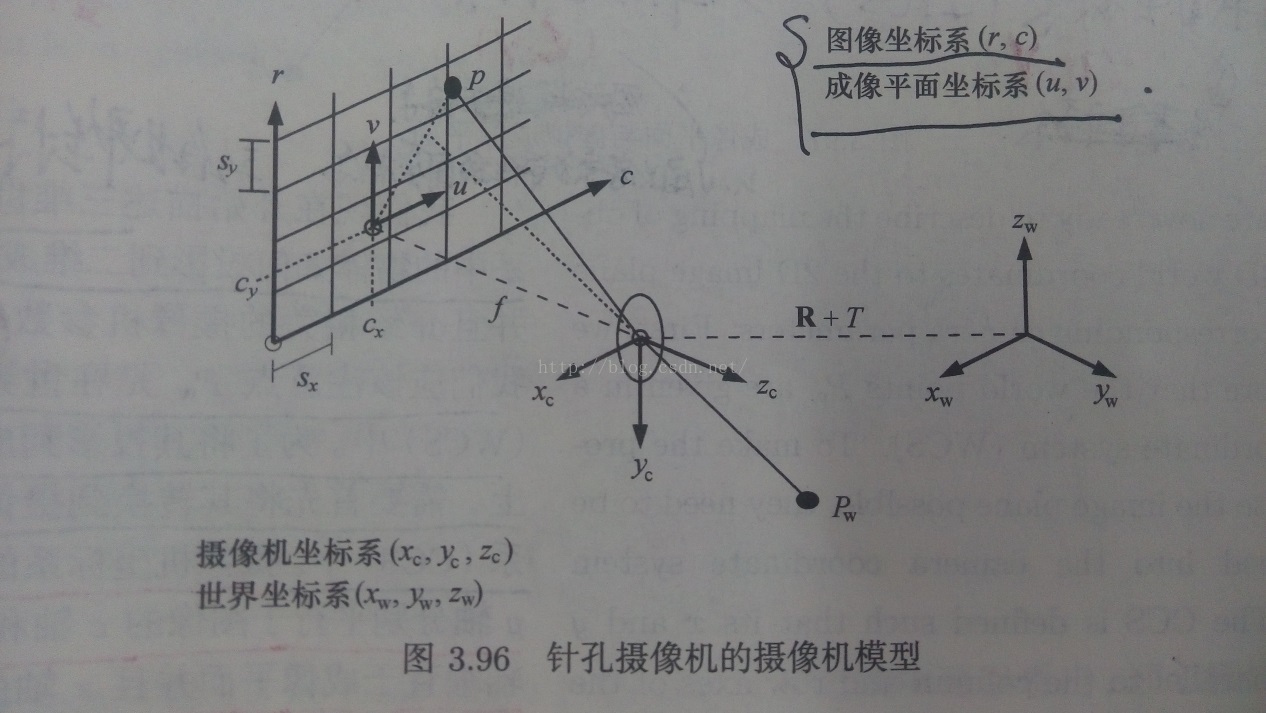
以下是对四种坐标系的解释以及坐标系之间的关系:
世界坐标系也称真实或现实世界坐标系,它是客观世界的绝对坐标。一般的3D场景都用这个坐标系来表示。
摄像机坐标系是以摄像机为中心制定的坐标系统,取摄像机的光轴做为z轴。
成像平面坐标系是指在摄像机内所形成的象平面坐标系统,注意:这里容易混淆:图像中的uv坐标系。
成像平面与摄像机坐标系统的xy平面平行,这样成像平面原点就在摄像机的光轴(z轴)上。
图像坐标系是指在计算机内部数字图像所用的坐标系,文中即cr坐标系。图像坐标系与成像平面坐标系在同一平面上,图像坐标系包括图像物理坐标系(以毫米等为单位)和图像像素坐标系(以像素为单位)。














 576
576











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









