







 超级会员免费看
超级会员免费看
我们在上一篇文章中通过一个简单的例子算是入门卡尔曼滤波了,本文将以此为基础讨论一些技术细节。
卡尔曼滤波(Kalman Filter)
http://blog.csdn.net/baimafujinji/article/details/50646814
在上一篇文章中,我们已经对HMM和卡尔曼滤波的关联性进行了初步的讨论。参考文献【3】中将二者之间的关系归结为下表。
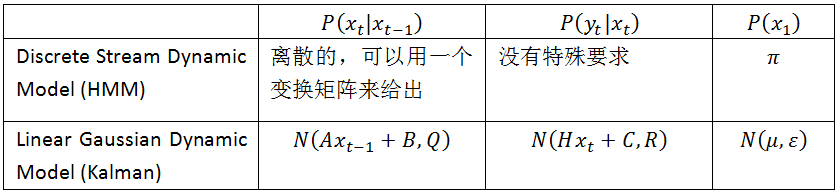
上表是什么意思呢?我们其实可以下面的式子来表示,其中,w 和 v 分别表示状态转移 和 测量 过程中的不确定性,也即是噪声,既然是噪声就可以假设它们服从一个零均值的高斯分布。这其实跟我们在上一篇文章中所给出的形式是一致的,也就是说我们认为过去的状态如果是 xt-1,那么当前状态xt应该是 xt-1的一个线性变换,而这个估计过程其实是有误差的,用一个零均值的高斯噪声(概率分布)来表达。类似地,当前的测量值yt应该是真实值 xt 的一个线性变换,而这个测量过程仍然是有误差的,也用一个零均值的高斯噪声(概率分布)来表达。


 订阅专栏 解锁全文
订阅专栏 解锁全文
















 859
859











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











