







近年,随着有监督学习的低枝果实被采摘的所剩无几,无监督学习成为了研究热点。VAE(Variational Auto-Encoder,变分自编码器)[1,2] 和 GAN(Generative Adversarial Networks) 等模型,受到越来越多的关注。
笔者最近也在学习 VAE 的知识(从深度学习角度)。首先,作为工程师,我想要正确的实现 VAE 算法,以及了解 VAE 能够帮助我们解决什么实际问题;作为人工智能从业者,我同时希望在一定程度上了解背后的原理。
作为学习笔记,本文按照由简到繁的顺序,首先介绍 VAE 的具体算法实现;然后,再从直观上解释 VAE 的原理;最后,对 VAE 的数学原理进行回顾。我们会在适当的地方,对变分、自编码、无监督、生成模型等概念进行介绍。
我们会看到,同许多机器算法一样,VAE 背后的数学比较复杂,然而,工程实现上却非常简单。
这篇 Conditional Variational Autoencoders 也是 by intuition 地介绍 VAE,几张图也非常用助于理解。
1. 算法实现
这里介绍 VAE 的一个比较简单的实现,尽量与文章[1] Section 3 的实验设置保持一致。完整代码可以参见 repo。
1.1 输入:
数据集 X⊂Rn。
做为例子,可以设想 X 为 MNIST 数据集。因此,我们有六万张 0~9 的手写体 的灰度图(训练集), 大小为 28×28。进一步,将每个像素归一化到[0,1],则 X⊂[0,1]784 。
图1. MNIST demo (图片来源)
1.2 输出:
一个输入为 m 维,输出为 n 维的神经网络,不妨称之为 decoder [1](或称 generative model [2])(图2)。
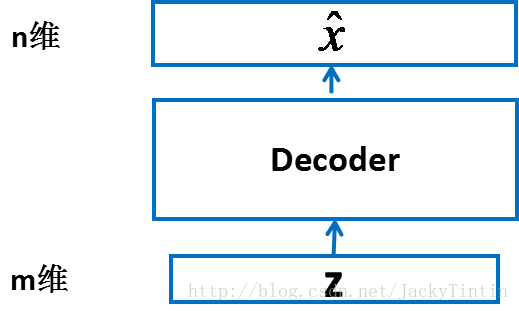
图 2. decoder
- 在输入输出维度满足要求的前提下,decoder 以为任何结构——MLP、CNN,RNN 或其他。
- 由于我们已经将输入数据规一化到 [0, 1] 区间,因此,我们令 decoder 的输出也在这个范围内。这可以通过在 decoder 的最后一层加上 sigmoid 激活实现 :
f(x)=11+e−x- 作为例子,我们取 m = 100,decoder 的为最普遍的全连接网络(MLP)。基于 Keras Functional API 的定义如下:
n, m = 784, 2
hidden_dim = 256
batch_size = 100
## Encoder
z = Input(batch_shape=(batch_size, m))
h_decoded = Dense(hidden_dim, activation='tanh')(z)
x_hat = Dense(n, activation='sigmoid')(h_decoded)- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
1.3 训练
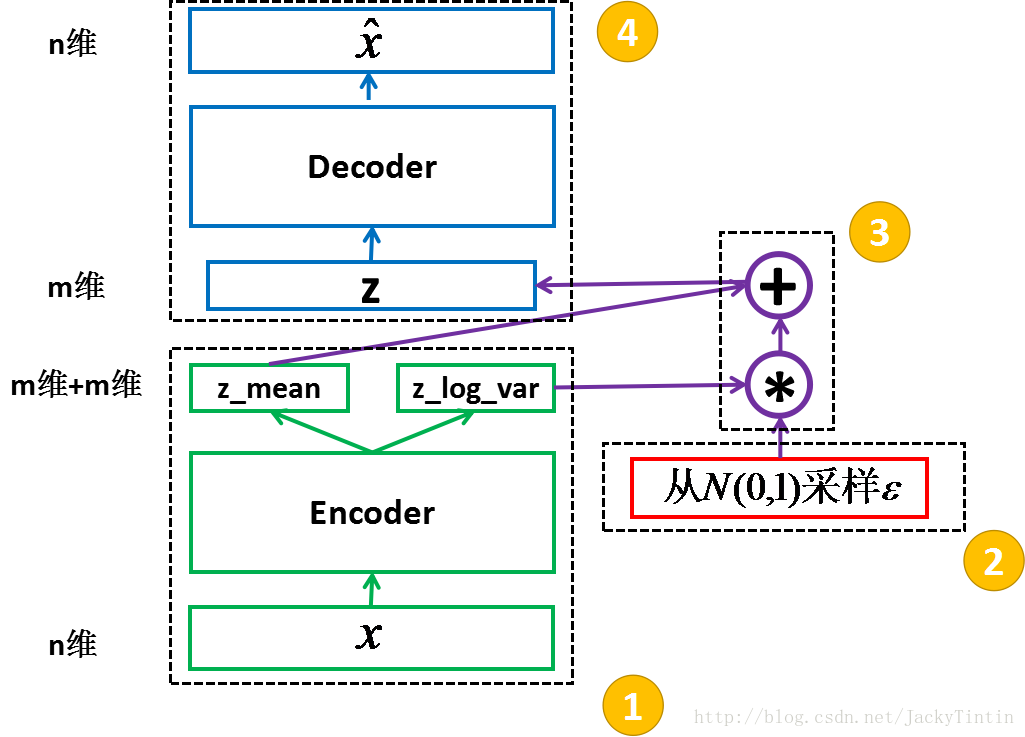
图 3. VAE 结构框架
1.3.1 encoder
为了训练 decoder,我们需要一个辅助的 encoder 网络(又称 recognition model)(如图3)。encoder 的输入为 n 维,输出为 2×m 维。同 decoder 一样,encoder 可以为任意结构。
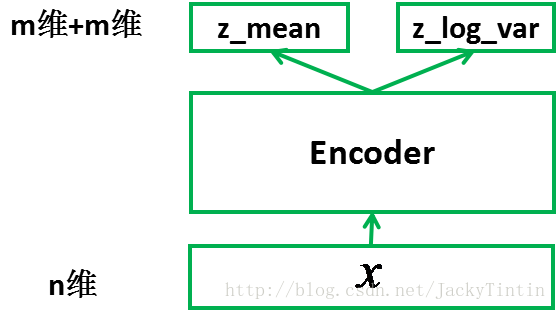
图 4. encoder
1.3.2 采样(sampling)
我们将 encoder 的输出(2×m 个数)视作分别为 m 个高斯分布的均值(z_mean)和方差的对数(z_log_var)。
接着上面的例子,encoder 的定义如下:
## Encoder
x = Input(batch_shape=(batch_size, n))
h_encoded = Dense(hidden_dim, activation='tanh')(x)
z_mean = Dense(m)(h_encoded) # 均值
z_log_var = Dense(m)(h_encoded) # 方差对数- 1
- 2
- 3
- 4
- 5
然后,根据 encoder 输出的均值与方差,生成服从相应高斯分布的随机数:
epsilon = K.random_normal(shape=(batch_size, m),
mean=0.,std=epsilon_std) # 标准高斯分布
z = z_mean + exp(z_log_var / 2) * epsilon- 1
- 2
- 3
z 就可以作为上面定义的 decoder 的输入,进而产生 n 维的输出 x^。
图5. 采样
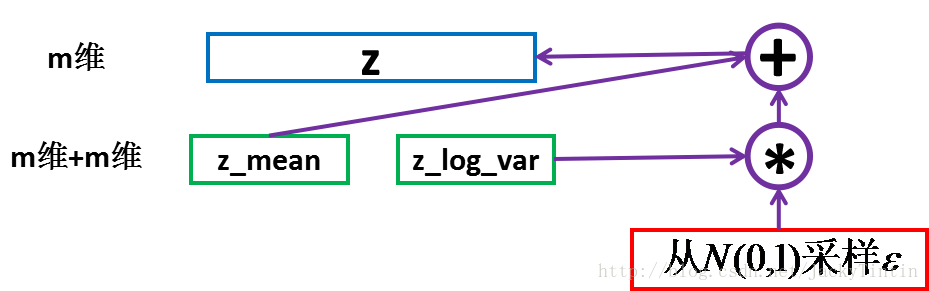
这里运用了 reparemerization 的技巧。由于 z∼N(μ,σ),我们应该从 N(μ,σ) 采样,但这个采样操作对 μ 和 σ 是不可导的,导致常规的通过误差反传的梯度下降法(GD)不能使用。通过 reparemerization,我们首先从 N(0,1) 上采样 ϵ,然后,z=σ⋅ϵ+μ。这样,z∼N(μ,σ),而且,从 encoder 输出到 z,只涉及线性操作,(ϵ 对神经网络而言只是常数),因此,可以正常使用 GD 进行优化。方法正确性证明见[1] 2.3小节和[2] 第3节 (stochastic backpropagation)。
图6. Reparameterization (图片来源)
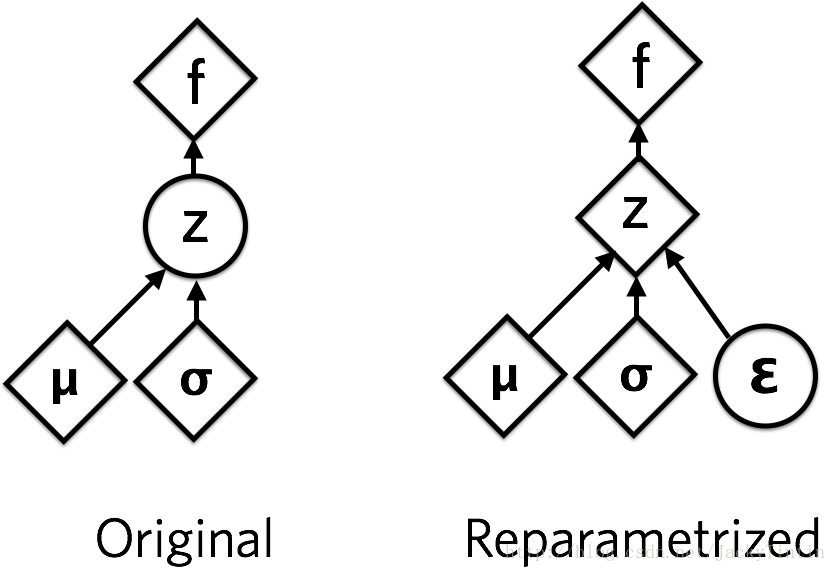
preparameterization 的代价是隐变量必须连续变量[7]。
1.3.3 优化目标
encoder 和 decoder 组合在一起,我们能够对每个 x∈X,输出一个相同维度的 x^。我们目标是,令 x^ 与 x自身尽量的接近。即 x 经过编码(encode)后,能够通过解码(decode)尽可能多的恢复出原来的信息。
注:严格而言,按照模型的假设,我们要优化的并不是 x 与 x^ 之间的距离,而是要最大化 x 的似然。不同的损失函数,对应着不是 p(x|z) 的不同概率分布假设。此处为了直观,姑且这么解释,详细讨论见下文([1] 附录C)。
由于 x∈[0,1],因此,我们用交叉熵(cross entropy)度量 x 与 x^ 差异:
xent 越小,x 与 x^ 越接近。
我们也可以用均方误差来度量:
mse 越小,两者越接近。
训练过程中,输出即是输入,这便是 VAE 中 AE(autoencoder,自编码)的含义。
另外,我们需要对 encoder 的输出 z_mean(μ)及 z_log_var(logσ2)加以约束。这里使用的是 KL 散度(具体公式推导见下文):
这里的KL, 其实是 KL 散度的负值,见下文。
总的优化目标(最小化)为:
或
综上所述,有了目标函数,并且从输入到输出的所有运算都可导,我们就可以通过 SGD 或其改进方法来训练这个网络了。
由于训练过程只用到 x(同时作为输入和目标输出),而与 x 的标签无关,因此,这是无监督学习。
1.4 小结
总结一下,如图2,VAE 包括 encoder (模块 1)和 decoder(模块 4) 两个神经网络。两者通过模块 2、3 连接成一个大网络。得益于 reparemeterization 技巧,我们可以使用常规的 SGD 来训练网络。
学习算法的最好方式还是读代码,网上有许多基于不同框架的 VAE 参考实现,如 tensorflow、theano、keras、torch。
2. 直观解释
2.1 VAE 有什么用?
2.1.1 数据生成
由于我们指定 p(z) 标准正态分布,再接合已经训练和的 decoder (p(x|z)),就可以进行采样,生成类似但不同于训练集数据的新样本。 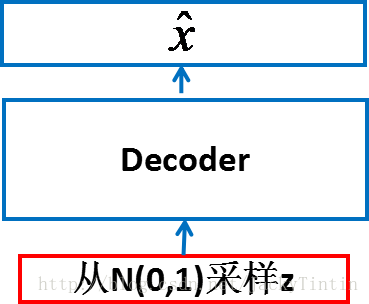
图7. 生成新的样本
图8(交叉熵)和图9(均方误差)是基于训练出来的 decoder,采样生成的图像(x^)

图8. 交叉熵损失
图9. 均方误差损失
严格来说,生成上图两幅图的代码并不是采样,而是 E[x|z] 。伯努力分布和高斯分布的期望,正好是 decocder 的输出 x^。见下面的讨论。
2.1.2 高维数据可视化
encoder 可以将数据 x,映射到更低维的 z 空间,如果是2维或3维,就可以直观的展示出来(图10、11)。

图10. 交叉熵损失

图11. 均方误差损失
2.1.3 缺失数据填补(imputation)
对许多现实问题,样本点的各维数据存在相关性。因此,在部分维度缺失或不准确的情况,有可能通过相关信息得到填补。图12、13展示一个简单的数据填补的实例。其中,第一行为原图,第二行为中间某几行像素的缺失图,第三行为利用 VAE 模型恢复的图。

图12. 交叉熵损失

图13. 均方误差损失
2.1.4 半监督学习
相比于高成本的有标注的数据,无标注数据更容易获取。半监督学习试图只用一小部分有标注的数据加上大量无标注数据,来学习到一个较好预测模型(分类或回归)。
VAE 是无监督的,而且也可以学习到较好的特征表征,因此,可以被用来作无监督学习[3, 12]。
2.2 VAE 原理
由于对概率图模型和统计学等背景知识不甚了了,初读[1, 2],对问题陈述、相关工作和动机完全没有头绪。因此,先放下公式,回到 comfort zone,类比熟悉的模型,在直觉上理解 VAE 的工作原理。
2.2.1 模型结构
从模型结构(以及名字)上看,VAE 和 自编码器(audoencoder)非常的像。特别的,VAE 和 CAE(constractive AE)非常相似,两者都对隐层输出增加长约束。而 VAE 在隐层的采样过程,起到和 dropout 类似的正则化偷用。因此,VAE 应该和 CAE 有类似的训练和工作方式,并且不太易容过拟合。
2.2.2 流形学习
数据虽然高维,但相似数据可能分布在高维空间的某个流形上(例如图14)。而特征学习就要显式或隐式地学习到这种流形。
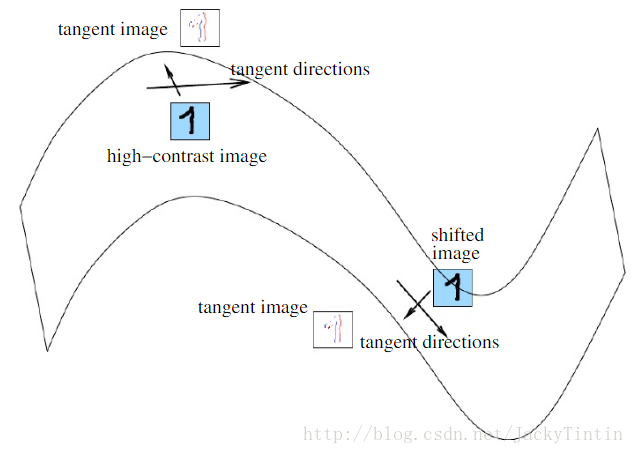
图14. 流形学习 (图片来源)
正是这种流形分布,我们才能从低的隐变量恢复出高维的观测变量。如图8、图9,相似的隐变量对应的观测变量确实比较像,并且这样相似性是平滑的变化。
3. 推导
VAE 提出背景涉及概率领域的最大似然估计(最大后验概率估计)、期望最大化(EM)算法、变分推理(variational inference,VI)、KL 散度,MCMC 等知识。但 VAE 算法本身的数学推导不复杂,如果熟悉各个内容的话,可以直接跳到 3.6。
3.1 问题陈述
已知变量 x 服从某固定但未知的分布。x 与隐变量(latent variables)的关系可以用图15 描述。这是一个简单的概率图。(注意,x 和 z 都是向量)
图15 两层的有向概率图,x为观测变量,z为隐变量
对于这个概率图,p(z) (隐变量 z 的先验)、p(x|z)(x 相对 z 的条件概率),及 p(z|x)(隐变量后验)三者就可行完全描述 x 和 z 之间的关系。因为两者的联合分布可以表示为:
x 的边缘分布可以计算如下:
我们只能观测到 x,而 z 是隐变量,不能被观测。我们任务便是通过一个观察集 X,估计概率图的相关参数。
对于一个机器学习模型,如果它能够(显式或隐式的)建模 p(z) 和 p(x|z),我们就称之为生成模型。这有如下两层含义:
1. 两者决定了联合分布 p(x,z);
2. 利用两者可以对 x 进行采样(ancestral sampling)。具体方法是,先依概率生成样本点 zi∼p(z),再依概率采样 xi∼p(x|zi)。
最简单的生成模型可能是朴素贝叶斯模型。
3.2 最大似然估计(Maximum Likelihood Estimation,MLE)
概率分布的参数最经典的方法是最大似然估计。
给定一组观测值
。观测数据的似然为:
一般取似然的对数:
MLE 假设最大化似然的参数 θ∗ 为最优的参数估计。因此,概率的参数估计问题转化为了最大化 logL(pθ(X))的最化问题。
从贝叶斯推理的观点,θ 本身也是随机变量,服从某分布 p(θ)。
这是最大后验概率估计(MAP)。
3.3 期望最大化算法(Expectation-Maximum,EM)
对于我们问题,利用 MLE 准则,优化目标为:
由于z 不可观测, 我们只能设法优化:
通过 MLE 或 MAP 现在我们已经有了要目标(对数似然),但在我们问题下,似然中存在对隐变量 z的积分。合理假设(指定)p(z) 和 p(x|z)的分布形式,可以用期望最大化算法(EM)解决。
随机初始化 θold
E-step:计算 pθold(z|x)
M-step:计算 θnew,给定:θnew=argmaxθQ(θ,θold)
其中,Q(θ,θold)=∫zpθold(z|x)log(pθ(x,z))dz
EM 比较直观的应用是解决高斯混合模型(Gaussian Mixtrue Model,GMM)的参数估计及K-Means 聚类。更复杂的,语音识别的核心——GMM-HMM 模型的训练也是利用 EM 算法[5]。
这里我们直接给出 ME 算法而省略了最重要的证明,但 EM 是变分推理的基础,如果不熟悉建议先参见 [4] Chapter 9 或 [9]。
3. 4 MCMC
EM 算法中涉及到对 p(z|x) (即隐变量的后验分布)的积分(或求各)。虽然上面举的例子可以方便的通过 EM 算法求解,但由于概率分布的多样性及变量的高维等问题,这个积分一般是难以计算的(intractable)。
因此,可以采用数值积分的方式近似求得 M-step 的积分项。
这涉及到按照 p(z|x) 对 z 进行采样。这需要用到 MCMC 等采样技术。关于 MCMC,LDA数学八卦 0.4.3 讲得非常明白,这里不再赘述。也可以参考 [4] Chapter 11。
3.5 变分推理(Variational Inference,VI)
由于 MCMC 算法的复杂性(对每个数据点都要进行大量采),在大数据下情况,可能很难得到应用。因此,对于
的积分,还需要其他的近似解决方案。
变分推理的思想是,寻找一个容易处理的分布 q(z),使得 q(z) 与目标分布p(z|x) 尽量接近。然后,用q(z) 代替 p(z|x)
分布之间的度量采用 Kullback–Leibler divergence(KL 散度),其定义如下:
KL(q||p)=∫q(t)logq(t)p(t)dt=Eq(logq−logp)=Eq(logq)−Eq[logp]
在不致引起歧义的情况下,我们省略 E 的下标。这里不加证明的指出 KL 的一些重要性质:KL(q||p)≥0 且 KL(q||p)=0⟺q=p [6]
注:KL散度不是距离度量,不满足对称性和三角不等式
因此,我们寻找 q(z) 的问题,转化为一个优化问题:
KL(q(z)||p(z|x)) 是关于 q(z) 函数,而 q(z)∈Q 是一个函数,因此,这是一个泛函(函数的函数)。而变分(variation)求极值之于泛函,正如微分求极值之于函数。
如果对于变分的说法一时不好理解,可以简单地将变分视为高斯分布中的高斯、傅里叶变换中的傅里叶一样的专有名词,不要尝试从字面去理解。
另外不要把变分(variation)与 variable(变量), variance(方差)等混淆,它们之间没有关系。
ELBO(Evidence Lower Bound Objective)
根据 KL 的定义及 p(z|x)=p(z,x)p(x)
令
根据 KL 的非负性质,我们有
ELBO 是 p(x) 对数似似然(即证据,evidence)的一个下限(lower bound)。
对于给定的数据集,p(x) 为常数,由
最小化 KL 等价于最大化 ELBO 。
关于变分推理这里就简单介绍这么多。有兴趣的话可以参考 [6]、[4] Chapter 10 以及最新的 tutorial [10]。
3.6 VAE
这里主要是按照 [1] 的思路来讨论 VAE。
观测数据 x(i) 的对数似然可以写作:
这里我们将 ELBO 记作 L,以强调需要优化的参数。
我们可以通过优化 L,来间接的优化似然。
VI 中我们通过优化 L 来优化 KL。
根据概率的乘法公式,经过简单的变换,L 可以写作
因此,我们优化的目标可以分解成等号右边的两项。
3.6.1 第一项
我们先考察第一项,这是一个 KL 散度。q 是我们要学习的分布,p 是隐变量的先验分布。通过合理的选择分布形式,这一项可以解析的求出。
如果,q 取各维独立的高斯分布(即第1部分的 decoder),同时令 p 是标准正态分布,那么,可以计算出,两者之间的 KL 散度为:
这就是本文第1部分目标函数的 KL 项了。
具体证明见 [1] 附录B。
3.6.2 第二项
然后,我们考察等式右边第二项。EqΦ(z|x)[logpθ(x(i)|z)] 是关于 x(i) 的后验概率的对数似然。
由于 VAE 并不对 q(z|x) (decoder) 做太强的假设(我们的例子中,是一个神经网络),因引,这一项不能解析的求出。所以我们考虑采样的方式。
这里 z(j) 不是通过从 decoder 建模的高斯分布直接采样,而是使用了第1部分介绍的 reparameterization 方法,其正确性证明见[1]的2.3小节。
如果每次只采一个样本点,则
其中,z~ 为采样点。很幸运,这个式正是神经网络常用的损失函数。
3.6.3 损失函数
通过上面讨论,VAE 的优化目标都成为了我们熟悉并容易处理的形式。下面,我们针对 pθ(x(i)|z~)(encoder)的具体建模分布,推导下神经网络训练中实际的损失函数。
第1部分介绍了 交叉熵和均方误差两种损失函数。下面简单介绍下,两种损失对应的不同概率分布假设。以下分布均假设 x 的各维独立。
交叉熵
如果假设 p(xi|z),(i=1,..,n) 服从伯努力分布,即:
对于某个观测值,其似然为:
decoder 输出为伯努力分布的参数,即 αz=decoder(z)=x^。则对数似然为:
−logL 这就是我们使用的交叉熵。
均方误差
如果假设
服务高斯分布,即
对数似然为:
decoder 为高斯分布的期望,这里不关心方差,即σ为未知常数。我们是优化目标为(去掉与优化无关的常数项):
这就是我们要优化的均方误差。
对不同损失函数与概率分布的联系,详细讨论见 [4] Chapter 5。
4. 结语
对这个领域的接触不多,认识浅显,文献也读的少,更多的是一些疑问:
-
VAE 是非常漂亮的工作,是理论指导模型结构设计的范例。
-
[1] [2] 独立提出 VAE。虽然最后提出的算法大致相同,但出发点和推导思路还是有明显不同,应该放在一起相互参照。
-
VAE 作为一种特征学习方法,与同样是非监督的 AE、 RBM 等方法相比,优劣势分是什么?
-
[2] 讨论了与 denoising AE 的关系,但 VAE 在形式上与 constractive auto-encoder 更相似,不知道两者的关系如何理解。
-
有些工作利用 VAE 作半监督学习,粗略看了些,并没有展现出相比于其他预训练方法的优势[3, 12]。
-
结合上面几点,虽然 VAE 是一个很好的工具,新的“论文增长点”,但仅就深度学习而言,感觉仅仅只是另一种新的工具。
Refences
- Kingma et al. Auto-Encoding Variational Bayes.
- Rezende et al. Stochastic Backpropagation and Approximate Inference in Deep Generative Models.
- Kingma and Rezende et al. Semi-supervised Learning with Deep Generative Models.
- Bishop. Pattern Recognition and Machine Learning.
- Young et al. HTK handbook.
- Blei et al. Variational Inference: A Review for Statisticians.
- Doersch. Tutorial on Variational Autoencoders.
- Kevin Frans. Variational Autoencoders Explained.
- Sridharan. Gaussian mixture models and the EM algorithm.
- Blei et al. Variational Inference: Foundations and Modern Methods.
- Durr. Introduction to variational autoencoders .
- Xu et al. Variational Autoencoders for Semi-supervised Text Classification.















 6651
6651











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











