







打印机上精密小轴承安装需要保证轴承方向是正确的,小轴承通过设备进行半自动安装,长时间
作业以后,操作员可能产生疲劳,将轴承方向弄错,造成后续工序无法继续作业。使用视觉对该
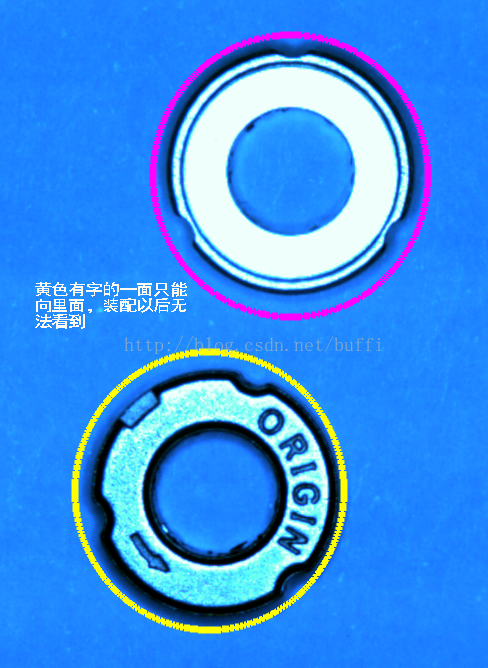
轴承装配自动检测是非常必要的。下图为轴承装配以后的情况,绿色圆圈里面为轴承。

轴承非常小,直径不到20毫米,如下图。其中一面雕刻有文字“ORIGIN”和一个箭头符号(黄色
圆圈表示),另外一面为光面,无任何符号(洋红圆圈表示)。轴承正确装配以后,光面外露,另一
面即有文字面无法看到。
这类检测可以使用双态算子进行。在介绍如何进行正确识别之前,将简单介绍机器视觉大师自动检测
类任务的基本操作。
基本相关操作
假设机器视觉大师已经正确安装在电脑上(如果没有,请到官网http://www.hdy.net.cn/softshare/ddcam.htm
页面下载并安装,或百渡搜索“机器视觉大师”)。基本操作如下:
1. 双击桌面上的”机器视觉大师”图标(蓝色圈圈),运行程序。如下图

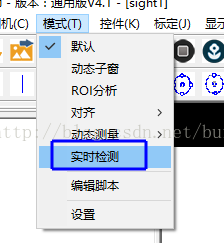
2. 点击菜单”模式”->”实时检测”,切换模式到自动检测模式。
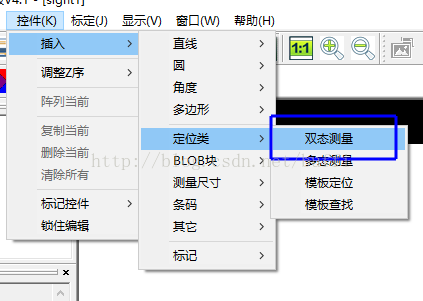
3. 点击菜单”控件”->”插入”->”定位类”->”双态测量”,添加一个”双态测量”算子。
4. 点击“监视运行”按钮,进入相机监视状态,调整夹具,光源,镜头,将产品样品
放置合适位置,以获得最佳图像。

5. 双击视场中“双态测量”算子,进行必要的形状调整,模板学习和参数设置(下节将详细描述) 。
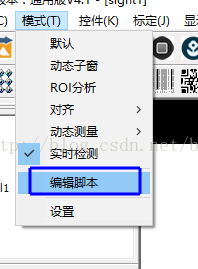
6. 点击菜单”模式”->”编辑脚本”,进行检测后结果处理 。
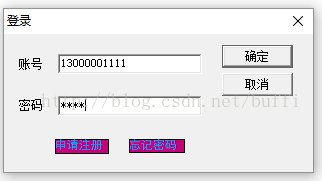
7. 点击菜单”文件”->”登录或注册”项,获取正式自动检测权限。(注意:该步骤仅通用版需要)
8. 最后,点击”测量运行”按钮,正式进行自动测量。

温馨提示:步骤2,3必须在非相机运行状态下进行,即不能“监视运行”或“测量运行”。
配置双态测量算子
在能识别轴承的装配结果之前,必须正确的配置测量算子和进行必要的脚本编写。假设
已经按照前面章节所述添加了一个“双态测量 “算子。下面介绍基本的形状调节,
模板学习,参数配置过程。
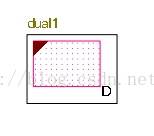
一、选中算子,然后双击进入参数设置页面。
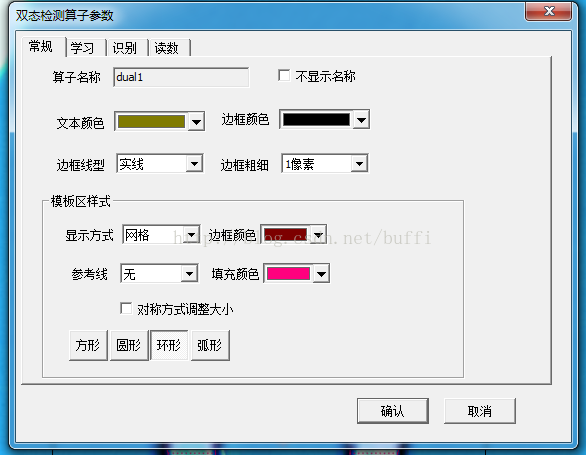
将模板区样式设置为环形,调整好算子搜索区和模板区。最终效果如下图:

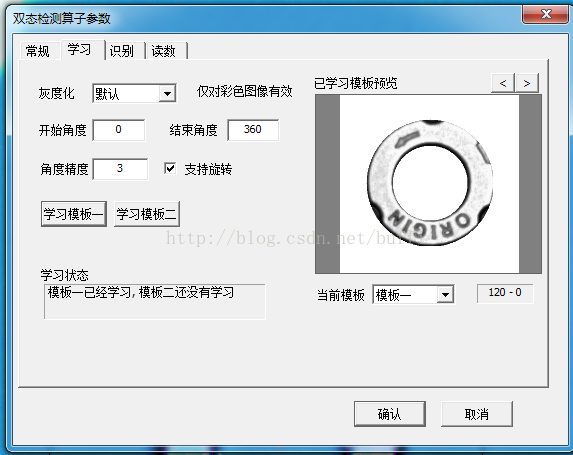
二、重新双击该算子,进行参数设置和模板学习。在学习页下,选择“支持旋转“,将
开始角度设为0,结束角度设为360,角度精度设为3.(注意:角度精度越小,耗时越长),
然后点击“学习模板一“按钮,进行模板学习。
三、切换到”识别”页面,选择”相关性”识别方法,将初始分数设置为0.3,最小分数设置为“0.95“。
点击”确认”按钮,完成双态算子的配置工作。
编写脚本
点击菜单”模式”->”编辑脚本”, 弹出”编辑脚本”对话框。选择测量类型为“质量检测”。脚本
编写如下图:

下面是完整的脚本代码:
if (sight1.dual1.res==0) then
mvs.good=0
mvs.ng =1
else
mvs.good =1
mvs.ng =0
end
该脚本的意思是如果视场1(名称:sight1)里面的双态算子1(名称:dual1)的检测结果为0
(模板一的索引为0,不是1),那么将当前的good变量为0,ng变量设置为1。
质量检测类任务支持2个系统变量:good和ng,具体如下:
| 变量名 | 说明 | 类型 |
| good | 合格标记 | 布尔(1为真,0为假) |
| ng | 次品标记 | 布尔(1为真,0为假) |
注意:视场名称为请根据本地电脑实际相机名称编写。
保存工作
在正式进行检测之前,建议点击菜单”文件”->”保存”项,将当前的设计保存为”轴承测量”文件,
以备将来重复使用。用户也可以根据不同轴承型号,保存多个不同文件,在检测时,直接调出
使用。
检测运行
登录到云平台,放置产品到夹具上,然后点击”测量运行”,进行正式测量工作。

温馨提示:如果用户已经正确登录,将在窗口的状态栏里面显示该账号,如下图:
最新版多多摄像头大师(机器视觉大师)下载地址:http://www.hdy.net.cn/softshare/ddcam.htm
技术交流QQ群: 295860595 该群文件空间即时更新多多摄像头大师最新版本,下载速度更快














 6882
6882











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









