








函数功能:采用Canny方法对图像进行边缘检测
函数原型:
void cvCanny(
const CvArr* image,
CvArr* edges,
double threshold1,double threshold2,
int aperture_size=3
);
函数说明:
第一个参数表示输入图像,必须为单通道灰度图。
第二个参数表示输出的边缘图像,为单通道黑白图。
第三个参数和第四个参数表示阈值,这二个阈值中当中的小阈值用来控制边缘连接,大的阈值用来控制强边缘的初始分割即如果一个像素的梯度大与上限值,则被认为是边缘像素,如果小于下限阈值,则被抛弃。如果该点的梯度在两者之间则当这个点与高于上限值的像素点连接时我们才保留,否则删除。
第五个参数表示Sobel 算子大小,默认为3即表示一个3*3的矩阵。Sobel 算子与高斯拉普拉斯算子都是常用的边缘算子,详细的数学原理可以查阅专业书籍。
结果
:
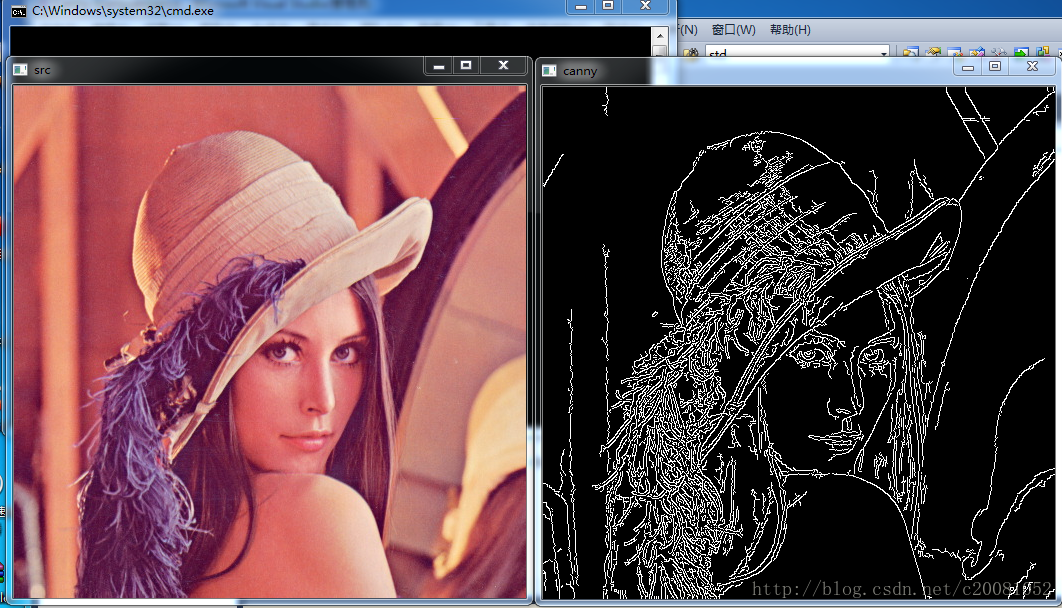
程序:
#include "cv.h"
#include "cxcore.h"
#include "highgui.h"
int main( int argc, char** argv )
{
//声明IplImage指针
IplImage* pImg = NULL;
IplImage* pCannyImg = NULL;
pImg = cvLoadImage( "E:\\Lena.jpg", -1);
//载入图像,强制转化为Gray
if(pImg!=NULL)
{
//为canny边缘图像申请空间
pCannyImg = cvCreateImage(cvGetSize(pImg),
IPL_DEPTH_8U,
1);
//canny边缘检测
cvCanny(pImg, pCannyImg, 50, 150, 3);
//创建窗口
cvNamedWindow("src", 1);
cvNamedWindow("canny",1);
//显示图像
cvShowImage( "src", pImg );
cvShowImage( "canny", pCannyImg );
cvWaitKey(0); //等待按键
//销毁窗口
cvDestroyWindow( "src" );
cvDestroyWindow( "canny" );
//释放图像
cvReleaseImage( &pImg );
cvReleaseImage( &pCannyImg );
return 0;
}
return -1;
}














 9万+
9万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









