








读取摄像头,用鼠标选择目标,确定目标颜色直方图,我跟踪的目标为乒乓球,且目标与背景颜色对比明显
效果如图——
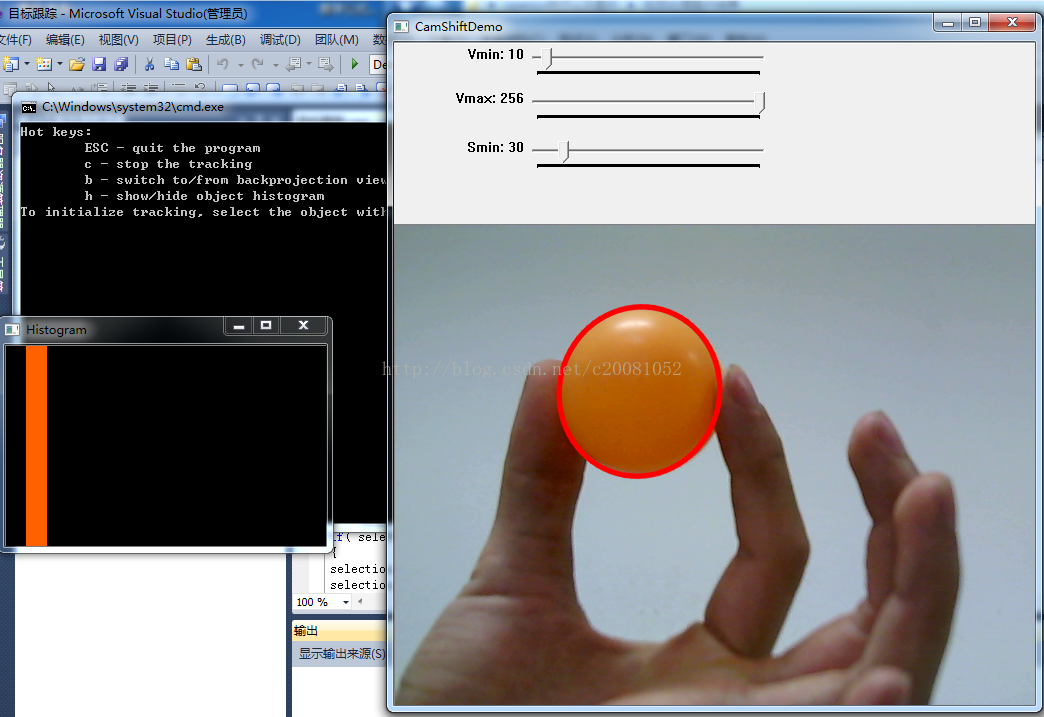
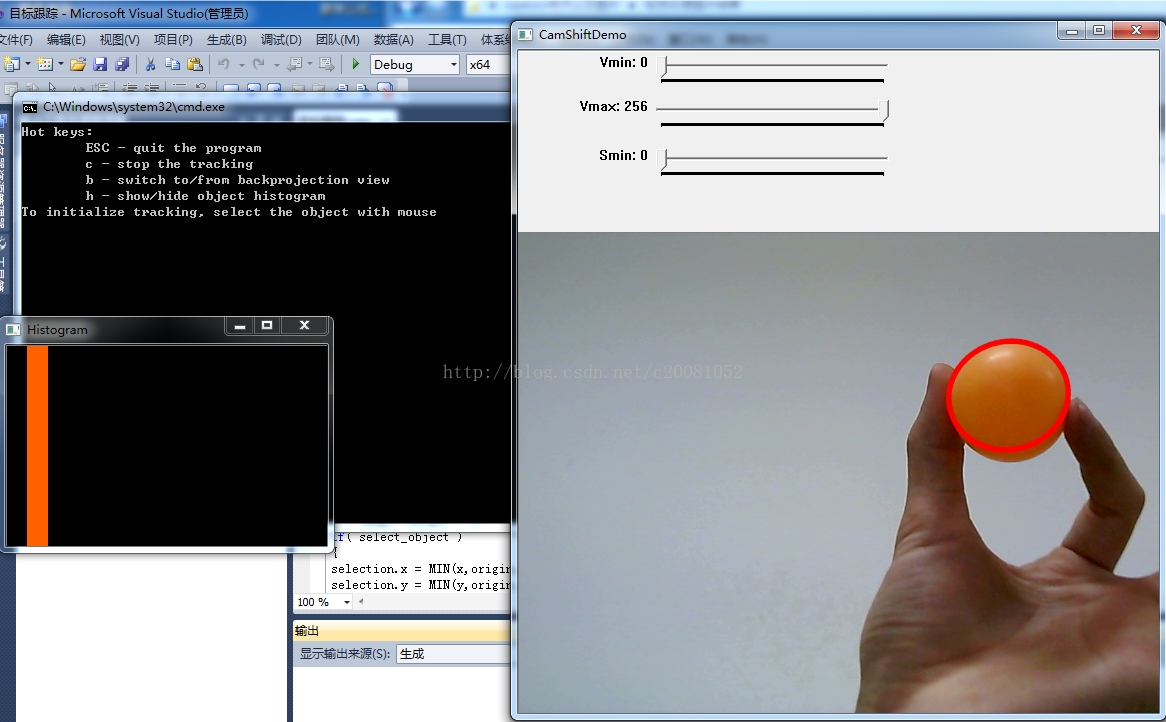
移动目标跟踪结果不错——
程序如下——
// 目标跟踪.cpp : Defines the entry point for the console application.
//
#include "cv.h"
#include "highgui.h"
#include <stdio.h>
#include <ctype.h>
#include"cxcore.h"
IplImage *image = 0, *hsv = 0, *hue = 0, *mask = 0, *backproject = 0, *histimg = 0;
CvHistogram *hist = 0;
int backproject_mode = 0;
int select_object = 0;
int track_object = 0;
int show_hist = 1;
CvPoint origin;
CvRect selection;
CvRect track_window;
CvBox2D track_box;
CvConnectedComp track_comp;
int hdims = 16;
float hranges_arr[] = {0,180};
float* hranges = hranges_arr;
int vmin = 10, vmax = 256, smin = 30;
void on_mouse( int event, int x, int y, int flags, void* param )
{
if( !image )
return;
if( image->origin )
y = image->height - y;
if( select_object )
{
selection.x = MIN(x,origin.x);
selection.y = MIN(y,origin.y);
selection.width = selection.x + CV_IABS(x - origin.x);
selection.height = selection.y + CV_IABS(y - origin.y);
selection.x = MAX( selection.x, 0 );
selection.y = MAX( selection.y, 0 );
selection.width = MIN( selection.width, image->width );
selection.height = MIN( selection.height, image->height );
selection.width -= selection.x;
selection.height -= selection.y;
}
switch( event )
{
case CV_EVENT_LBUTTONDOWN:
origin = cvPoint(x,y);
selection = cvRect(x,y,0,0);
select_object = 1;
break;
case CV_EVENT_LBUTTONUP:
select_object = 0;
if( selection.width > 0 && selection.height > 0 )
track_object = -1;
break;
}
}
CvScalar hsv2rgb( float hue )
{
int rgb[3], p, sector;
static const int sector_data[][3]=
{{0,2,1}, {1,2,0}, {1,0,2}, {2,0,1}, {2,1,0}, {0,1,2}};
hue *= 0.033333333333333333333333333333333f;
sector = cvFloor(hue);
p = cvRound(255*(hue - sector));
p ^= sector & 1 ? 255 : 0;
rgb[sector_data[sector][0]] = 255;
rgb[sector_data[sector][1]] = 0;
rgb[sector_data[sector][2]] = p;
return cvScalar(rgb[2], rgb[1], rgb[0],0);
}
int main( int argc, char** argv )
{
CvCapture* capture = 0;
if( argc == 1 || (argc == 2 && strlen(argv[1]) == 1 && isdigit(argv[1][0])))
capture = cvCaptureFromCAM( argc == 2 ? argv[1][0] - '0' : 0 );
else if( argc == 2 )
capture = cvCaptureFromAVI( argv[1] );
if( !capture )
{
fprintf(stderr,"Could not initialize capturing...\n");
return -1;
}
printf( "Hot keys: \n"
"\tESC - quit the program\n"
"\tc - stop the tracking\n"
"\tb - switch to/from backprojection view\n"
"\th - show/hide object histogram\n"
"To initialize tracking, select the object with mouse\n" );
cvNamedWindow( "Histogram", 1 );
cvNamedWindow( "CamShiftDemo", 1 );
cvSetMouseCallback( "CamShiftDemo", on_mouse, 0 );
cvCreateTrackbar( "Vmin", "CamShiftDemo", &vmin, 256, 0 );
cvCreateTrackbar( "Vmax", "CamShiftDemo", &vmax, 256, 0 );
cvCreateTrackbar( "Smin", "CamShiftDemo", &smin, 256, 0 );
for(;;)
{
IplImage* frame = 0;
int i, bin_w, c;
frame = cvQueryFrame( capture );
if( !frame )
break;
if( !image )
{
/* allocate all the buffers */
image = cvCreateImage( cvGetSize(frame), 8, 3 );
image->origin = frame->origin;
hsv = cvCreateImage( cvGetSize(frame), 8, 3 );
hue = cvCreateImage( cvGetSize(frame), 8, 1 );
mask = cvCreateImage( cvGetSize(frame), 8, 1 );
backproject = cvCreateImage( cvGetSize(frame), 8, 1 );
hist = cvCreateHist( 1, &hdims, CV_HIST_ARRAY
, &hranges, 1 );
histimg = cvCreateImage( cvSize(320,200), 8, 3 );
cvZero( histimg );
}
cvCopy( frame, image, 0 );
cvCvtColor( image, hsv, CV_BGR2HSV );
if( track_object )
{
int _vmin = vmin, _vmax = vmax;
cvInRangeS( hsv, cvScalar(0,smin,MIN(_vmin,_vmax),0),
cvScalar(180,256,MAX(_vmin,_vmax),0), mask );
cvSplit( hsv, hue, 0, 0, 0 );
if( track_object < 0 )
{
float max_val = 0.f;
cvSetImageROI( hue, selection );
cvSetImageROI( mask, selection );
cvCalcHist( &hue, hist, 0, mask );
cvGetMinMaxHistValue( hist, 0, &max_val, 0, 0 );
cvConvertScale( hist->bins, hist->bins, max_val ? 255. / max_val : 0.,
0 );
cvResetImageROI( hue );
cvResetImageROI( mask );
track_window = selection;
track_object = 1;
cvZero( histimg );
bin_w = histimg->width / hdims;
for( i = 0; i < hdims; i++ )
{
int val =
cvRound( cvGetReal1D(hist->bins,i)*histimg->height/255 );
CvScalar color = hsv2rgb(i*180.f/hdims);
cvRectangle( histimg, cvPoint(i*bin_w,histimg->height),
cvPoint((i+1)*bin_w,histimg->height - val),
color, -1, 8, 0 );
}
}
cvCalcBackProject( &hue, backproject, hist );
cvAnd( backproject, mask, backproject, 0 );
cvCamShift( backproject, track_window,
cvTermCriteria( CV_TERMCRIT_EPS |
CV_TERMCRIT_ITER, 10, 1 ),
&track_comp, &track_box );
track_window = track_comp.rect;
if( backproject_mode )
cvCvtColor( backproject, image, CV_GRAY2BGR );
if( image->origin )
track_box.angle = -track_box.angle;
cvEllipseBox( image, track_box, CV_RGB(255,0,0), 3, CV_AA, 0 );
}
if( select_object && selection.width > 0 && selection.height > 0 )
{
cvSetImageROI( image, selection );
cvXorS( image, cvScalarAll(255), image, 0 );
cvResetImageROI( image );
}
cvShowImage( "CamShiftDemo", image );
cvShowImage( "Histogram", histimg );
c = cvWaitKey(10);
if( (char) c == 27 )
break;
switch( (char) c )
{
case 'b':
backproject_mode ^= 1;
break;
case 'c':
track_object = 0;
cvZero( histimg );
break;
case 'h':
show_hist ^= 1;
if( !show_hist )
cvDestroyWindow( "Histogram" );
else
cvNamedWindow( "Histogram", 1 );
break;
default:
;
}
}
cvReleaseCapture( &capture );
cvDestroyWindow("CamShiftDemo");
return 0;
}














 1508
1508











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









