







转载请注明:http://blog.csdn.net/c602273091/article/details/54572428
Homogeneous Coordinates
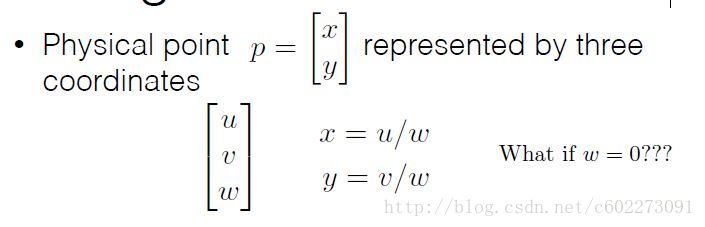
点的二维坐标可以用三维表示,因为用二维怎么表示无穷,用无穷符号么?显然不够理想。当w=0的时候,就在无穷远点。
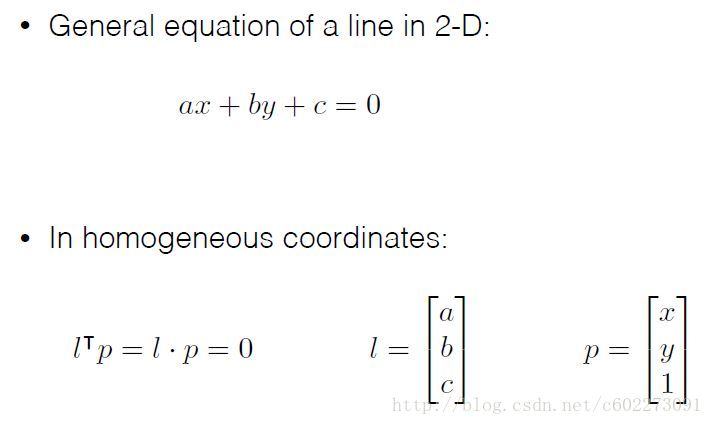
2D的直线表示:
Pin-hole camera Model
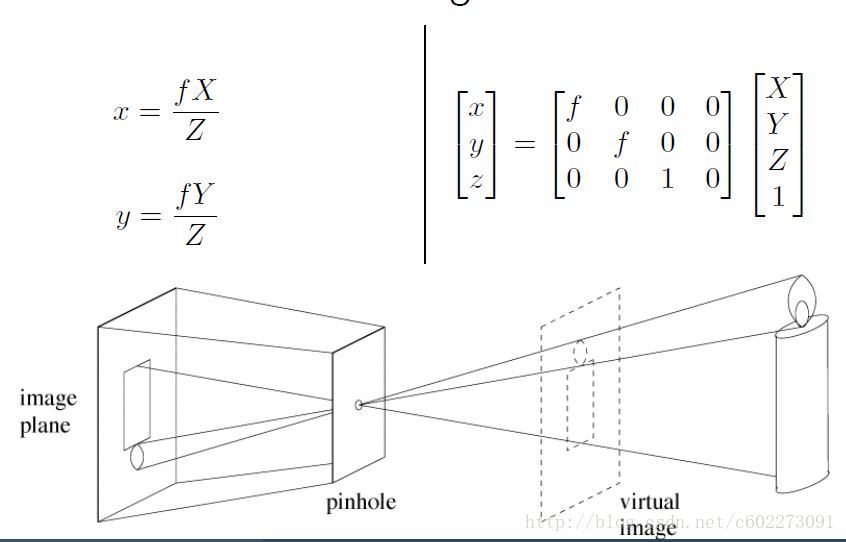
在小孔模型的基础上,我们进一步得到摄像头的透视模型。
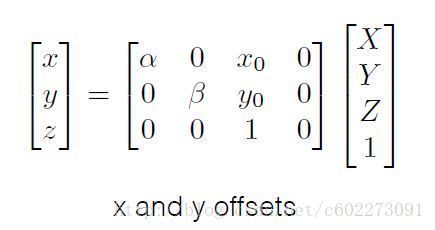
Standard Perspective Camera Model
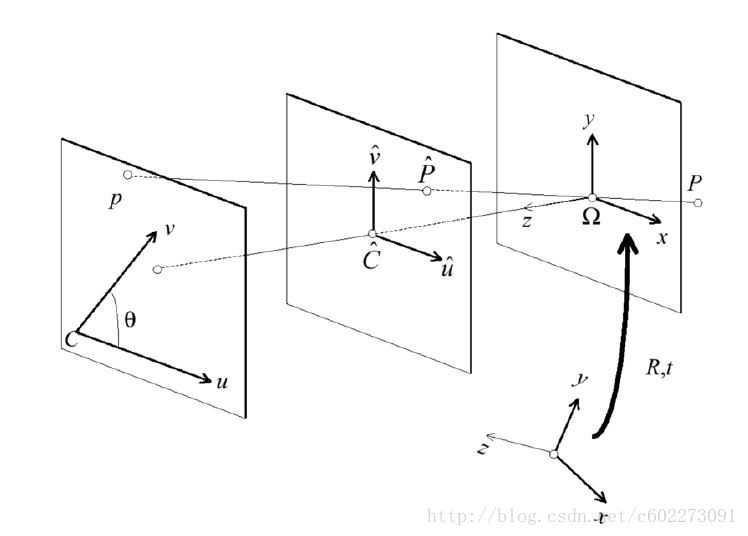
从真实世界的点投影到图片2D的过程。
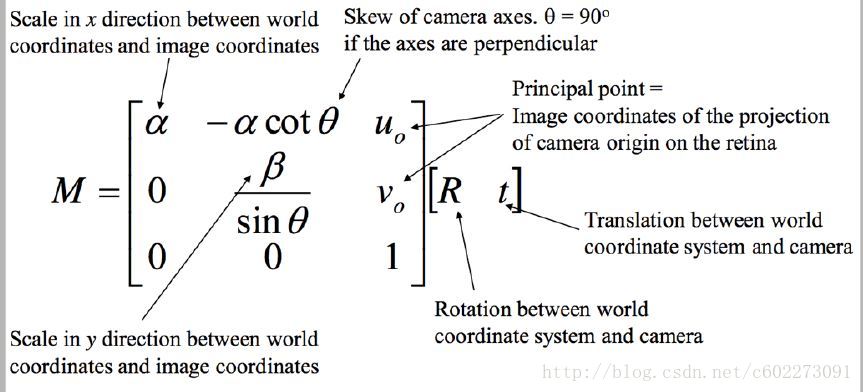
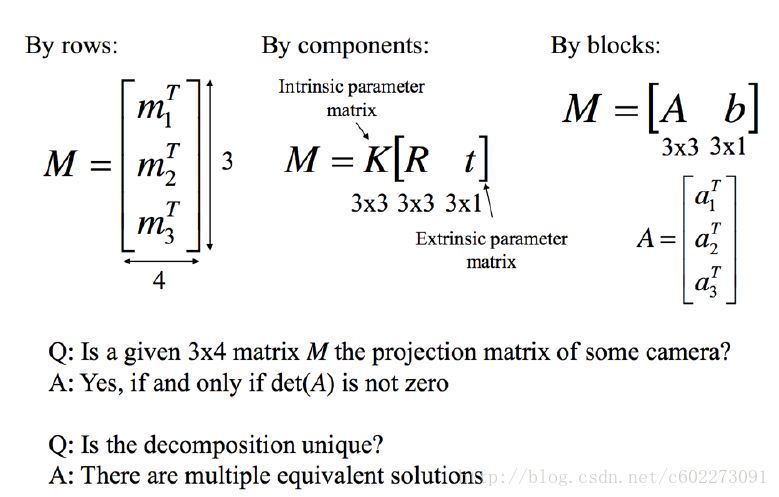
这个矩阵左边的就叫做内参,右边的就是外参。
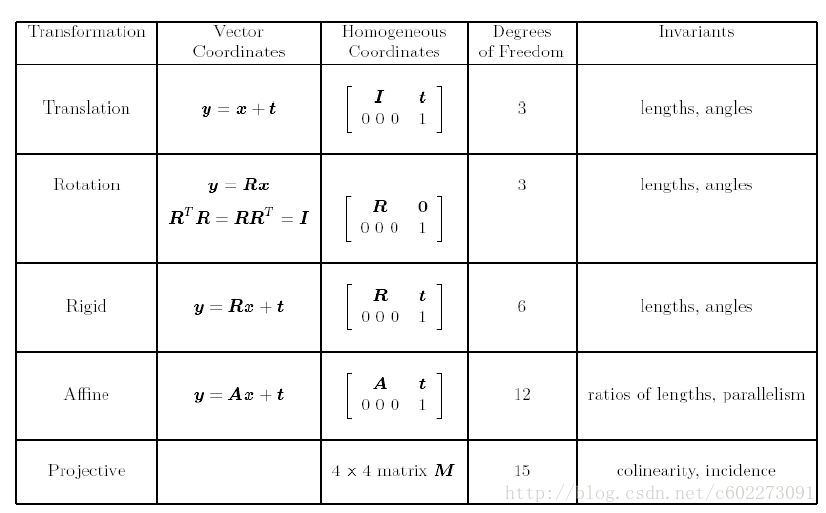
这里需要注意的是有一些基本的变换要记住:
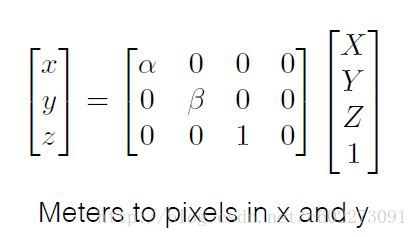
以上的M矩阵可以有多种写法:
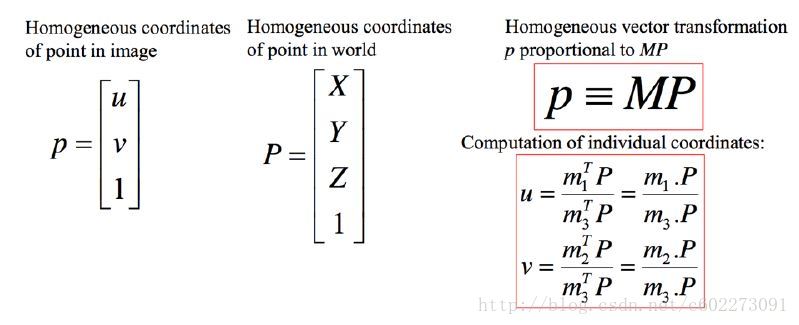
使用投影矩阵把3D的点投影到2D中:
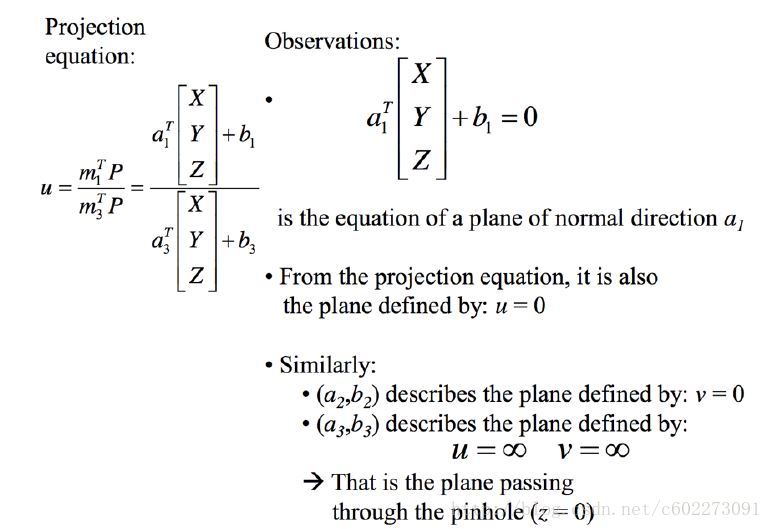
当分子为0的时候,那么这时候这个公式表示方向为 a1 的平面,感觉这个东西和ORB-SLAM描述的点云的方向一样。
它们描述的平面如下图:
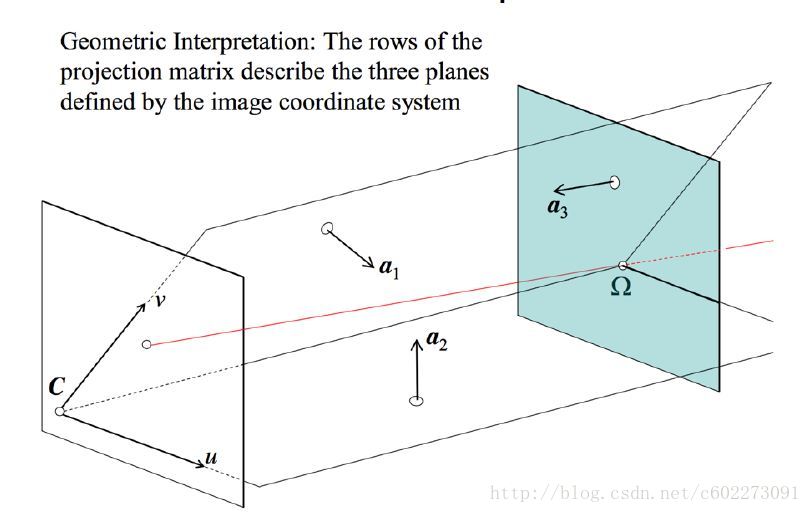
给定一个图片上的平面的点,怎么计算它真实的3D点的拍摄方向以及怎么计算摄像头的中心呢?
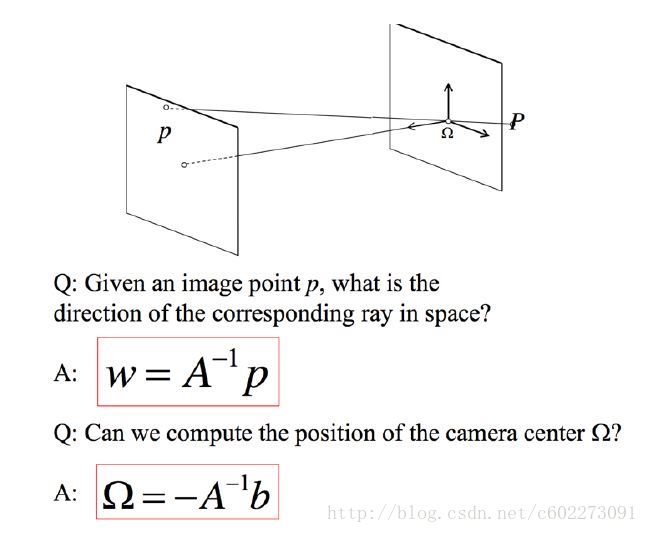
现在我才知道Gary讲的东西真是很有用。
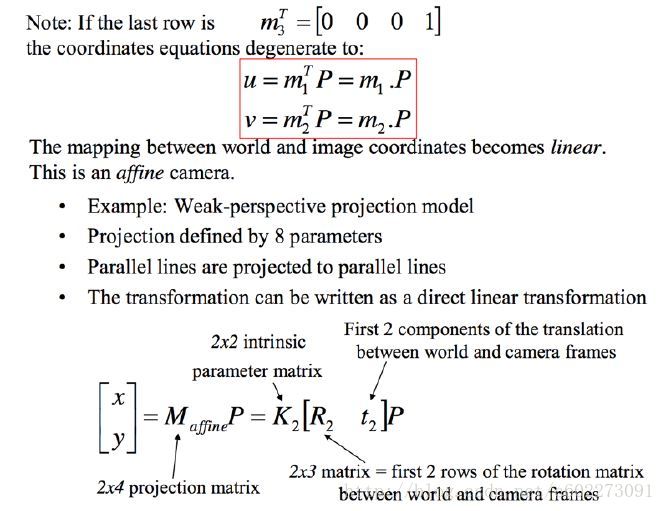
affine camera model
如果M矩阵最后一行是[0 0 0 1],那么这就是一个仿射相机,并且真实世界与图片只是线性变化。比如weak Perspective。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 1407
1407











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









