







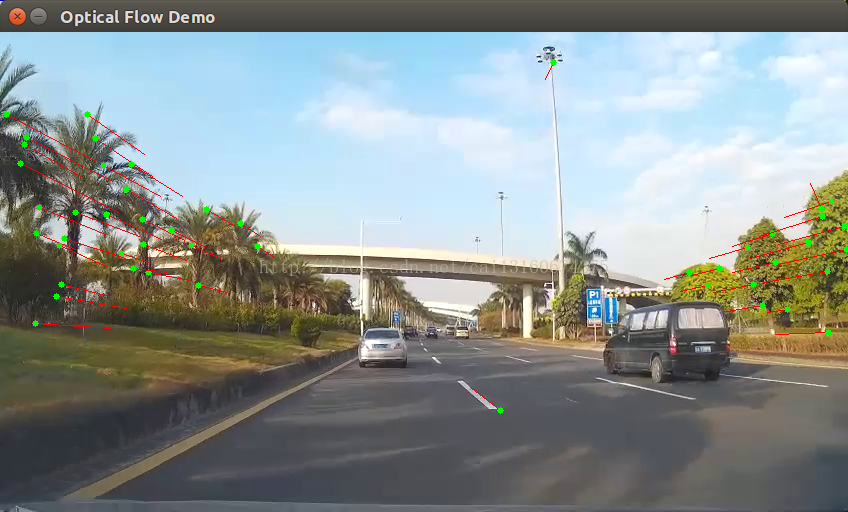
首先是一些一个光流算法实现,关键函数是
goodFeaturesToTrack 能检测出角点,算法是Harris角点和shi-tomasi角点 点击有详细的算法介绍,大概就是计算一个窗口在各个方向上的变化程度,有变化则说明是角点
#include <iostream>
#include <vector>
#include <cstdio>
#include <opencv2/opencv.hpp>
#include <opencv2/xfeatures2d.hpp>
using namespace cv;
using namespace std;
using namespace cv::xfeatures2d;
void OpticalFlow(Mat &frame, Mat & result);
bool addNewPoints();
bool acceptTrackedPoint(int i);
Mat curgray; // 当前图片
Mat pregray; // 预测图片
vector<Point2f> point[2]; // point0为特征点的原来位置,point1为特征点的新位置
vector<Point2f> initPoint; // 初始化跟踪点的位置
vector<Point2f> features; // 检测的特征
int maxCount = 300; // 检测的最大特征数
double qLevel = 0.1; // 特征检测的等级
double minDist = 20.0; // 两特征点之间的最小距离
vector<uchar> status; // 跟踪特征的状态,特征的流发现为1,否则为0
vector<float> err;
//g++ pyrLK.cpp -o pyrLK `pkg-config --cflags --libs opencv`
int main()
{
Mat matSrc;
Mat matRst;
VideoCapture cap("/home/caixing/Videos/car2.mov");
//cap.open(0);
int totalFrameNumber = cap.get(CV_CAP_PROP_FRAME_COUNT);
// perform the tracking process
printf("Start the tracking process, press ESC to quit.\n");
for (int nFrmNum = 0; nFrmNum < totalFrameNumber; nFrmNum++) {
// while(1){
// get frame from the video
double t = (double)cvGetTickCount();
cap >> matSrc;
if (!matSrc.empty())
{
OpticalFlow(matSrc, matRst);
//cout << "This picture is " << nFrmNum << endl;
}
else
{
cout << "Error : Get picture is empty!" << endl;
}
t = (double)cvGetTickCount() - t;
//cout << "cost time: " << t / ((double)cvGetTickFrequency()*1000.) << endl;
waitKey(0);
//if (waitKey(1) == 27) break;
}
return 0;
}
bool addNewPoints()
{
return point[0].size() <= 30;
}
void OpticalFlow(Mat &frame, Mat & result)
{
cvtColor(frame, curgray, CV_BGR2GRAY);
frame.copyTo(result);
if (addNewPoints())
// if (1)
{
goodFeaturesToTrack(curgray, features, maxCount, qLevel, minDist);
// point[0]=features;
// initPoint=features;
point[0].insert(point[0].end(), features.begin(), features.end());
initPoint.insert(initPoint.end(), features.begin(), features.end());
}
if (pregray.empty())
{
curgray.copyTo(pregray);
}
calcOpticalFlowPyrLK(pregray, curgray, point[0], point[1], status, err,Size(7,7));
//cout<<point[0].size()<<" "<<point[1].size()<<" "<<status.size()<<" "<<err.size()<<endl;
int k = 0;
for (size_t i = 0; i<point[1].size(); i++)
{
if (acceptTrackedPoint(i))
{
initPoint[k] = initPoint[i];
point[1][k++] = point[1][i];
}
}
point[1].resize(k);
initPoint.resize(k);
for (size_t i = 0; i<point[1].size(); i++)
{
line(result, initPoint[i], point[1][i], Scalar(0, 0, 255));
circle(result, point[1][i], 3, Scalar(0, 255, 0), -1);
}
swap(point[1], point[0]);
swap(pregray, curgray);
imshow("Optical Flow Demo", result);
//waitKey(50);
}
bool acceptTrackedPoint(int i)
{
return status[i] && ((abs(point[0][i].x - point[1][i].x) + abs(point[0][i].y - point[1][i].y)) > 2);
}
在opencv的sample里面,还有两张图片的特征点进行匹配的代码样例,opencv-3.2.0/samples/cpp/matchmetod_orb_akaze_brisk.cpp 对比了好几种特征点检测的算法,然后匹配结果,主要接口如下
Ptr<Feature2D> b;
if (*itDesc == "AKAZE-DESCRIPTOR_KAZE_UPRIGHT"){
b = AKAZE::create(AKAZE::DESCRIPTOR_KAZE_UPRIGHT);
}
if (*itDesc == "AKAZE"){
b = AKAZE::create();
}
if (*itDesc == "ORB"){
b = ORB::create();
}
else if (*itDesc == "BRISK"){
b = BRISK::create();
}
try
{
// We can detect keypoint with detect method
b->detect(img1, keyImg1, Mat());
// and compute their descriptors with method compute
b->compute(img1, keyImg1, descImg1);
// or detect and compute descriptors in one step
b->detectAndCompute(img2, Mat(),keyImg2, descImg2,false);















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









