







来源:机器人大讲堂
概要:目前世界上至少有48个国家在发展机器人,其中25个国家已涉足服务机器人开发。
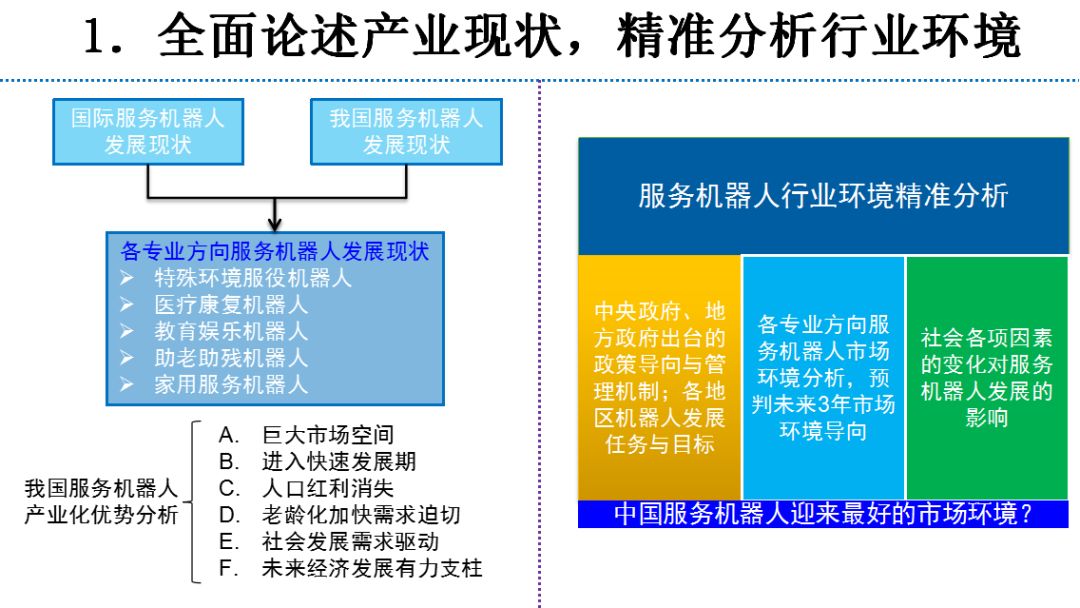
一、报告编写背景和特点
北京立德融创智能机器人技术研究院(简称“立德研究院”)通过对各机器人项目的实施以及自身发展需要,分别对国内机器人发展比较有特色的地区企业(京津冀、长三角、珠三角、西南地区、东北地区)、产业园等进行了实地调研,同时组织数场服务机器人行业研讨会,邀请行业专家、企业高管讨论各专业方向服务机器人发展现状与趋势。依据调研结果和行业研讨会成形意见,组织撰写《2018-2020年中国服务机器人行业深度研究报告》。本报告极有针对性地挖掘了服务机器人行业市场发力点,以助服务机器人企业形成良好的可持续发展趋势,有效拓展战略性目标市场。
二、立德研究院简介
立德共创机器人服务平台(机器人大讲堂)中智库咨询平台立德研究院是一家集机器人高端智库、产业咨询、机器人技术、成果转化、创业孵化、项目投资等功能于一体的智能机器人技术研究院,旨在搭建机器人技术平台,构建中国机器人行业大数据,打造中国机器人高端智库和“立德资讯”权威行业咨询品牌。
立德研究院成立以来,积极为国家部委、地方政府、投融资机构担任智库,拥有国内外机器人与人工智能领域专家、企业家和创业者资源,俱乐部成员达到3000余人。作为国家发改委“智能机器人三年行动规划(2018-2020年)”执笔单位,公安部“警用机器人发展规划”执笔单位、科技部“先进制造技术发展热点”参与单位、国投创新“工业机器人”执笔单位,并承担潍坊市政府机器人规划、苏州相城机器人产业规划、中国电子学会“2049机器人发展展望”等任务。
三、报告内容简述
目前世界上至少有48个国家在发展机器人,其中25个国家已涉足服务机器人开发。在日本、北美和欧洲,迄今已有7 种类型计40余款服务型机器人进入实验和半商业化应用。在服务机器人领域,发展处于前列的国家主要是日本、韩国、美国、德国和法国。
就专业服务机器人来说,2015年专业服务机器人的总数从2014年的32939件大幅增长了25%,达到41060件,销售额增长了14%,达到46亿美元。2015年全球专业服务机器人市场主要由国防应用机器人与物流机器人占据。其他的专业服务机器人包括建筑机器人、移动机器人平台、专业清洁机器人、检查与维护机器人、水下机器人和救援与安全机器人。
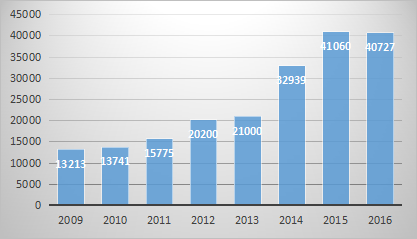
2009-2016年全球专业服务机器人销量(单位:台)
资料来源:国际机器人联盟(IFR)
从个人/家庭服务机器人来看,据统计2015年全球个人/家用服务机器人销量约为540万台,较2014 年增长16%;销售额为22亿美元。2011-2015年,全球个人/家庭服务机器人年均复合增长率约为20%。根据国际机器人联盟(IFR)预测,全球家用机器人数量在2016-2019年将增至3100万。目前,家用服务机器人主要包括家政服务机器人(包括机器人管家、真空清洁机器人、割草机器人等)、娱乐机器人、助残机器人、个人交通机器人和家庭安全与监视机器人。其中,家政服务机器人和娱乐机器人占据主要市场份额,助残机器人市场相对微小。

2014-2019年全球个人/家用服务机器人销量预测(单位:千台)
资料来源:国际机器人联盟(IFR)
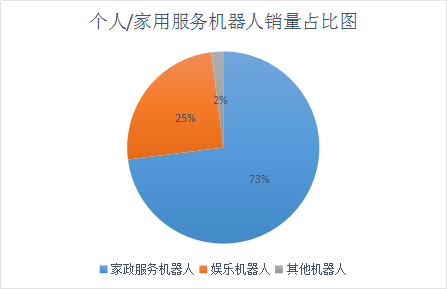
个人/家用服务机器人销量占比图
资料来源:国际机器人联盟(IFR)
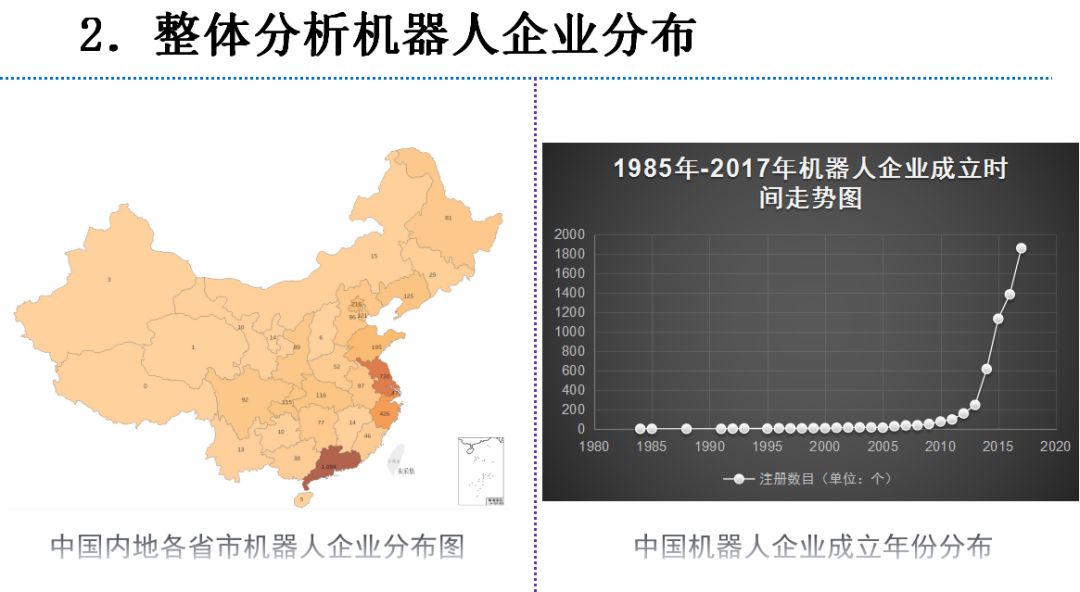
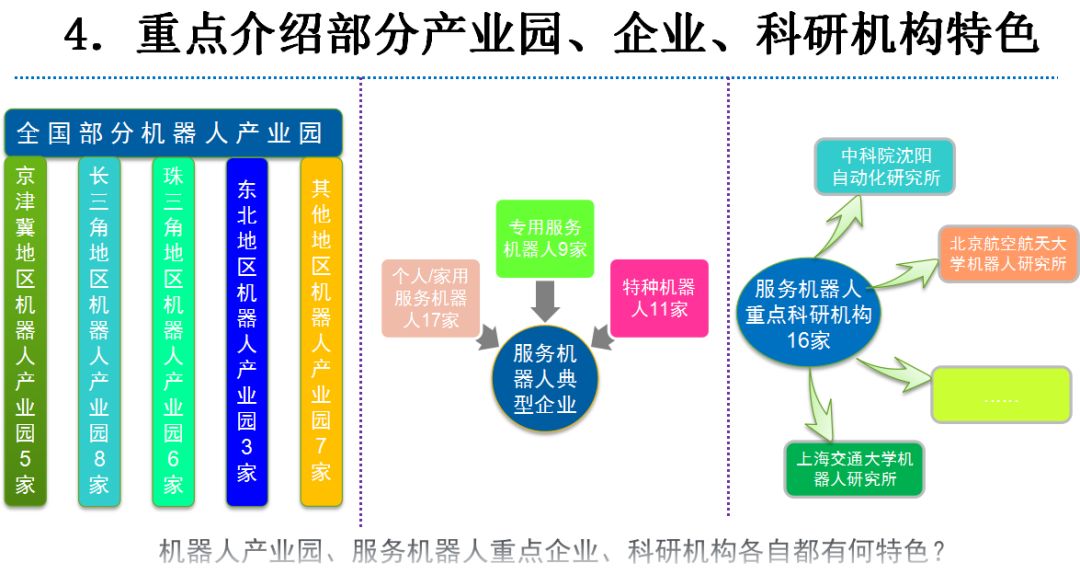
目前全国(除台湾省)机器人相关企业已达6000余家,坐落于全国各省市的不同区域。通过对机器人企业数据整理发现,机器人企业比较集中的地区主要有京津冀地区、长三角地区和珠三角地区。沿海地区各省市机器人企业数量明显要比中西部各省市机器人企业数量多,西部地区机器人企业寥寥无几。
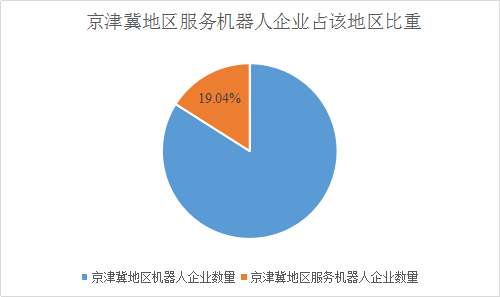
资料来源:立德研究院整理
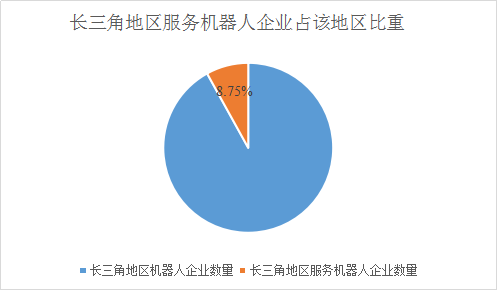
资料来源:立德研究院整理
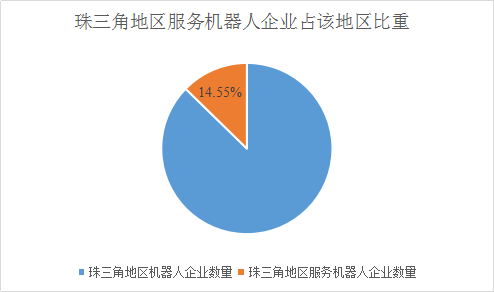
资料来源:立德研究院整理

中国机器人产业园分布状况
资料来源:立德研究院整理
目前国内机器人产业园共有40余个,包括已建成和在建的机器人产业园,其中长三角地区产业园分布密度最大,具体分布状况如图所示。
在服务机器人专利申请中(以关键词“服务机器人”在国家知识产权局专利检索平台搜索),主要分为3类:科研院所、服务机器人企业和个人。其中科研院所和服务机器人企业在服务机器人专利申请中占绝大数。
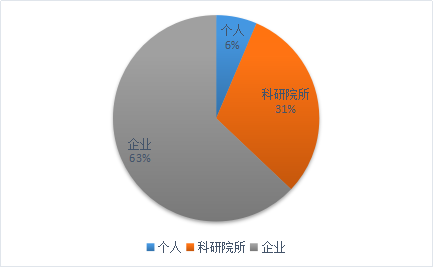
服务机器人专利申请人类型
资料来源:国家知识产权局专利检索平台 立德研究院整理
从2004年至2017年我国服务机器人的专利公开数总体呈上升趋势。2016年,我国服务机器人专利申请数量为321个;2017年,我国服务机器人专利申请数量已达432个。
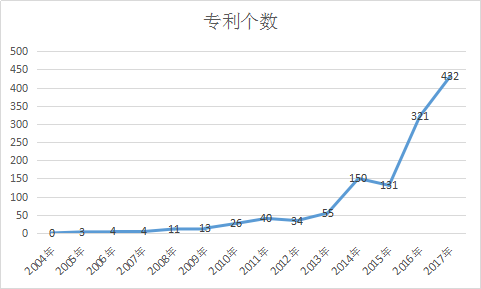
2004-2017 年服务机器人相关专利公开数量变化图(单位:个)
资料来源:国家知识产权局专利检索平台 立德研究院整理
未来智能实验室是人工智能学家与科学院相关机构联合成立的人工智能,互联网和脑科学交叉研究机构。由互联网进化论作者,计算机博士刘锋与中国科学院虚拟经济与数据科学研究中心石勇、刘颖教授创建。
未来智能实验室的主要工作包括:建立AI智能系统智商评测体系,开展世界人工智能智商评测;开展互联网(城市)云脑研究计划,构建互联网(城市)云脑技术和企业图谱,为提升企业,行业与城市的智能水平服务。
如果您对实验室的研究感兴趣,欢迎加入未来智能实验室线上平台。扫描以下二维码或点击本文左下角“阅读原文”















 1625
1625











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









