







1.1绪论
核心:有限集统计学
从纯概率范式下(贝叶斯),实现了大部分信息融合技术的统一。
1994年提出FISST后得到全面拓展。包含以下内容:
①多目标多源融合(MSI,1级融合)
②专家系统理论
③1级融合的传感器管理(包含分布式移动传感器的管理)
④群目标检测、跟踪与分类
⑤稳健的自动目标识别
⑥系统性能评估
专家系统理论的统一
: 模糊逻辑->Dempster-shafer理论
->规则->贝叶斯理论=>统一的贝叶斯滤波器
1级融合的统一: 检测->跟踪->识别=>统一的贝叶斯滤波器
1级传感器管理的统一:目标函数->任务目标->原则近似=>统一的贝叶斯滤波器
2/3级融合基础: 关系表示->群目标滤波->原则近似=>统一的贝叶斯滤波器
主要论题
单目标多源融合(单目标MSI)
非常规证据的系统化建模与处理——采用与雷达回波处理类似方式来处理规则、特征、属性、自然语言表述证据。
专家系统技术的系统化运用——包括乍德悖论的贝叶斯消解。
专家系统技术的系统化应用——以概率和最优方式使用贝叶斯、模糊逻辑、DS理论、以及基于规则的推理等技术。
系统性的通用技术基础——通用技术框架描述这些技术的通用理论基础。
系统性的数据转换方法——不损失相关信息的条件下将数据从一种不确定性表现形式转换为另一种表现形式。
系统性的实现方法——在纯在固有非线性的条件下实现这些技术。
单目标滤波器的新型实现方法:
——卡尔曼证据滤波器KEF
——联合检测跟踪(JoTT)
多目标多源融合(多目标MSI)
非常规数据与传统多目标技术(多假设关联MHC)的系统化集成。
将目标优先级和战术价值明确集成到模型中。
多源多目标信源综合建模,包括传感器视场、漏报、虚警以及杂波建模。
多目标动态过程综合建模,涵盖目标出现、消失、衍生以及协同运动等现象。
多目标滤波器的新型实现方法:
——SMC概率假设密度(SMC-PHD)
——混合高斯PHD(GM-PHD)
——SMC势集PHD(SMC-CPHD)
——混合高斯(GM-CPHD)
多目标统计学
——多目标概率密度
——信任质量函数
——概率生成泛函
多目标的积分微分运算法则及其系统应用,以便从根本上进行一些技术开发。
——多目标集积分
——多目标集导数
——多目标集泛函导数
1.2信息融合的挑战
信息具有高度迥异且模糊的形式
多源多目标的复杂性
多传感器多目标系统具有令人生畏的组合复杂性
1.3为什么需要随机集或FISST
提供了一种通用的数学表述。
统计学家Naylor J.C 和Smith A.F.M曾经这样评论道,“貌似简单的实现使得贝叶斯推理带有极大地欺骗性”。这种欺骗性将为那些易为表象迷惑的人埋下计算的僵局。
1.3.1多目标滤波的复杂性
复杂性1:单传感器贝叶斯滤波
单传感器的单目标递归贝叶斯滤波器的计算需求远远大于扩展卡尔曼滤波器(EKF)等传统技术。大量研究都关注贝叶斯滤波器的实时近似实现问题。若使用蒙特卡洛(smc亦称粒子系统)的原则近似技术,问题会有所改善。仅仅是有所改善,一般适用于SMC的算法计算量都不会小。
一个更为敏感的问题是:这类方法中建模和实现往往纠缠在一起,而且模型通常是面向特定实现技术的启发式设计。这类方法忽略了自然语言表述及规则等非常规信息的建模和处理。
复杂性2:单传感器多目标贝叶斯滤波
1.3.2超越启发式
需要更深层次领悟,恰恰是FISST追求的。假定尽可能真实,然后想方设法设计易于处理的近似方案。类似单目标问题。我们需要一套能处理模糊证据和多目标的形式化建模方法,必须是非启发式的与具体实现无关。如依据通用统计模型构造马尔科夫密度和似然函数的通用数学表达式,选择特定实现技术后,重新表达这些公式。
1.3.3单目标与多目标统计学的差别
以下是多传感器多目标统计学与单传感器单目标统计学主要差别(FISST引入的区别)
标准贝叶斯最优状态估计一般是未定义的;
像期望值、最小二乘优化和向农熵这些熟悉的概念也没有被定义;
像失配距离等其他概念则需要作较大修正;
除了FISST,尚没有一种明确的、通用的、系统性的技术能够对多传感器多目标问题进行建模并将之转化为贝叶斯形式。
1.3.4常规数据与模糊数据的区别
①对隐含的统计现象缺乏足够的认识
②构造可操作的数学模型过程中存在固有模糊性
数据建模包含以下四个步骤
①创建数学抽象以表示观测
②建模上述抽象过程银河固有的模糊性
③建模观测的产生过程
④建模应对实际数据产生现象缺乏足够的知识引入的任何模糊性
观测与状态估计(观测——对观测对象的某种观点,状态估计——基于观测对那些未呈现在我们面前的目标状态的推断)
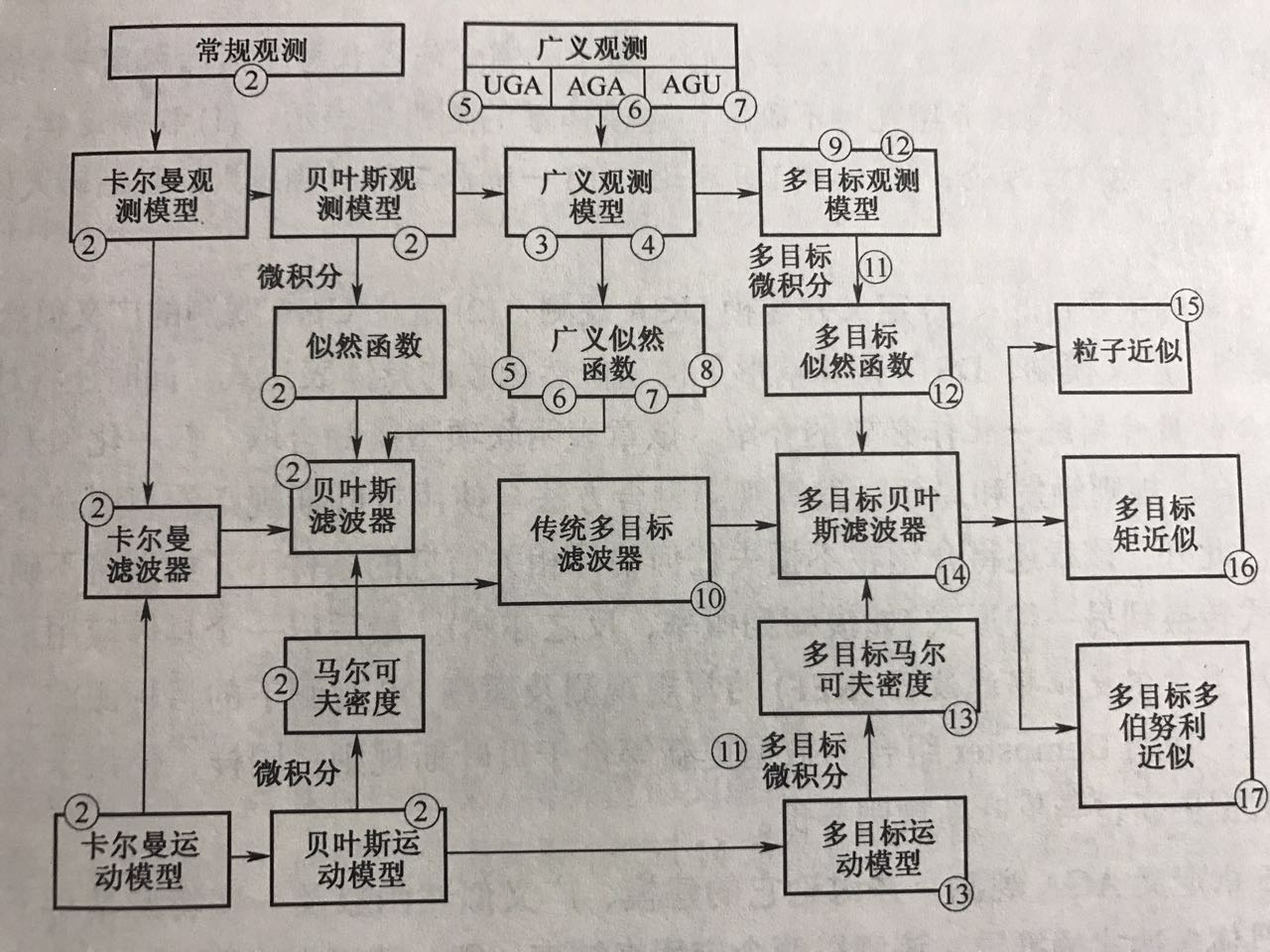
本源明确的精确(unambiguously generated unambiguous,UGU)观测(常规观测);
本源清楚的模糊(unambiguously generated ambiguous,UGA)观测(精确已知状态和观测之间的关系,但对观测对象及其模型表示却存在相当大的不确定性)
本源模糊的模糊(ambiguously generated ambiguous,AGA)观测(即对观测与状态间的关系以及观测的对象本身都存在相当大的不确定性)
本源模糊的精确(ambiguously generated unambiguous,AGU)观测(即常规观测,但对由状态生成观测对象本身的过程区不完全已知)
1.3.5形式化贝叶斯
形式化贝叶斯建模已经成为单传感器单目标研发中的公认标准。在形式化贝叶斯建模框架下,首先从一个用以描述传感器行为且为独立与实现的形式化观测模型和一个用以描述目标瞬态行为的形式化运动模型开始。推导出真是实似然密度和真实马尔科夫密度的具体形式(如实反映原始模型的概率密度函数)。给定这些假设可采用递归贝叶斯滤波器来解决单传感器单目标检测、跟踪、识别问题。
1.3.6模糊信息建模
FISST无缝集成Dempster组合、模糊合取、基于规则的推理等数据融合技术。
系统性通用建模:
①构造广义观测模型来描述广义观测(定义、产生以及这两个过程同时含有模糊性观测)
②将广义广策模型转换为相应的的广义似然函数(该似然函数能够如实反映广义观测模型,同时又囊括建模过程的不确定性)
③证明在一定条件下专家系统数据融合技术可在贝叶斯范式下严格定义。
1.3.7多源多目标形式化建模
系统性通用建模:
①为任意给定传感器构造多目标观测模型
②构造多目标运动模型
③将多目标观测模型转换为真实的多目标似然函数(即该似然函数能如实反映多目标传感器模型)
④将多目标运动模型转换为相应的真实马尔科夫密度(即该密度函数可如实反映多目标运动模型)
多目标贝叶斯最优估计器能够同时确定目标数和目标状态
1.4信息融合中的随机集
前身:
1.4.1多目标系统统计学
1.4.2专家系统统计学
1.4.3有限集统计学
1.5知识结构














 669
669











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









