







 本文介绍了SSIM(结构相似性)指数,详细讲解了其在图像质量评估中的应用,包括理论概念和MATLAB实现。
本文介绍了SSIM(结构相似性)指数,详细讲解了其在图像质量评估中的应用,包括理论概念和MATLAB实现。
一、结构相似性(structural similarity)
自然图像具有极高的结构性,表现在图像的像素间存在着很强的相关性,尤其是在空间相似的情况下。这些相关性在视觉场景中携带着关于物体结构的重要信息。我们假设人类视觉系统(HSV)主要从可视区域内获取结构信息。所以通过探测结构信息是否改变来感知图像失真的近似信息。
大多数的基于误差敏感度(error sensitivity)的质量评估方法(如MSE,PSNR)使用线性变换来分解图像信号,这不会涉及到相关性。我们要讨论的SSIM就是要找到更加直接的方法来比较失真图像和参考图像的结构。
二、SSIM指数
物体表面的亮度信息与照度和反射系数有关,且场景中的物体的结构与照度是独立的,反射系数与物体有关。我们可以通过分离照度对物体的影响来探索一张图像中的结构信息。这里,把与物体结构相关的亮度和对比度作为图像中结构信息的定义。因为一个场景中的亮度和对比度总是在变化的,所以我们可以通过分别对局部的处理来得到更精确的结果。
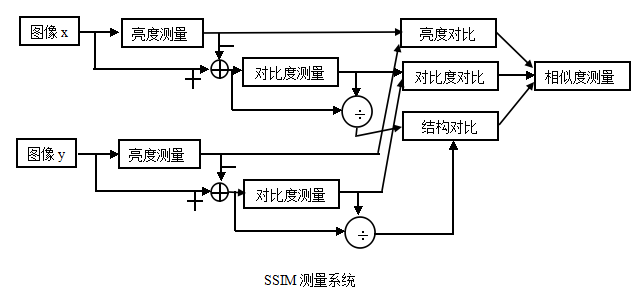
由SSIM测量系统可得相似度的测量可由三种对比模块组成,分别为:亮度,对比度,结构。接下来我们将会对这三模块函数进行定义。
首先,对于离散信号,我们以平均灰度来作为亮度测量的估计:
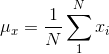 (1)
(1)
亮度对比函数l(x,y)是关于 的函数。
的函数。
的函数。
然后,由测量系统知道要把平均灰度值从信号中去除,对于离散信号 ,可使用标准差来做对比度估量值。
,可使用标准差来做对比度估量值。
,可使用标准差来做对比度估量值。
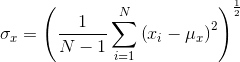 (2)
(2)
对比度对比函数c(x,y)就是 的函数。
的函数。
的函数。
接下来,信号被自己的标准差相除,结构对比函数就被定义成 和
和 的函数。
的函数。
和的函数。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









