









ICCV 2015 3D物体候选区域提取,自动驾驶中的物体检测的前一个步骤
Our code and data are online: http://www.cs.toronto.edu/ ˜ 3dop
暂时还不能访问
3 3D Object Proposals
我们的输入是 a stereo image pair,使用 Yamaguchi et al. [31] 计算深度信息。 We use depth to compute a point-cloud x and conduct all our reasoning in this domain.
3.1 Proposal Generation as Energy Minimization
Our MRF energy thus takes the following form:

Point Cloud Density:

Free Space:

Height Prior:

Height Contrast:

3.2 Discretization and Accumulators
Our point cloud is defined with respect to a left-handed coordinate system, where the positive Z-axis is along the viewing direction of the camera and the Y-axis is along the direction of gravity. We discretize the continuous space such that the width of each voxel is 0.2m in each dimension. We compute the occupancy, free space and height prior grids in this discretized space. Following the idea of integral images, we compute our accumulators in 3D.
3.3 Inference
3.4 Learning

3.5 Object Detection and Orientation Estimation Network
Our network is built on Fast R-CNN [34]
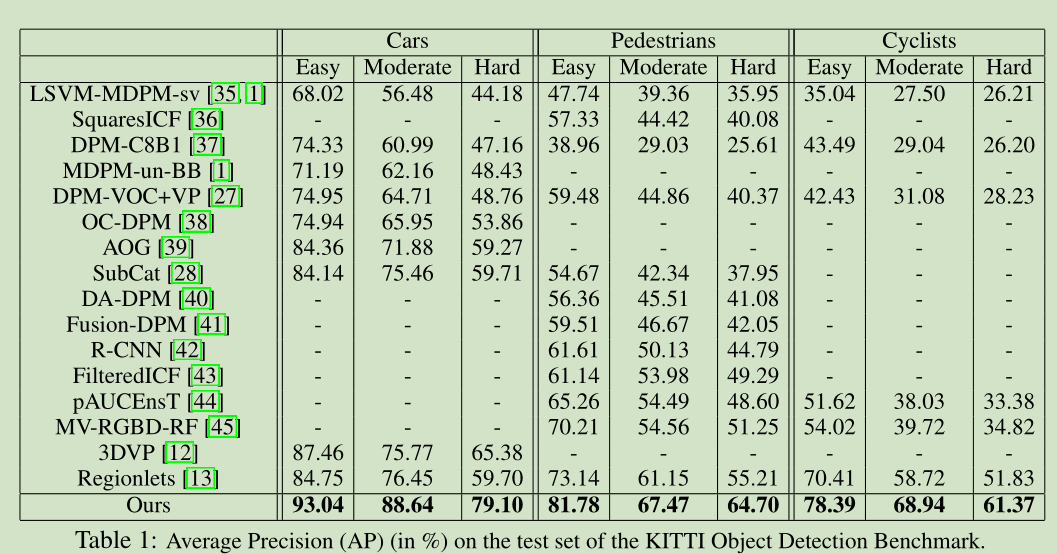
4 Experimental Evaluation














 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









