






转载:白眼哥哥
目的:学习存档
==================================
vins是今年刚开源的vio系统,跑了数据集效果挺好的,所以看了paper和代码。
视频地址:https://www.youtube.com/watch?v=I4txdvGhT6I
github:https://github.com/HKUST-Aerial-Robotics/VINS-Mono.Git
之前的博客对数据预处理、VIO初始化和里程计部分都做了介绍,这次博客主要介绍VINS系统中的最后一个步骤,也就是闭环检测。
闭环检测的步骤如下:
a)在滑动窗口后,把新关键帧加入集合中,再提取500个FAST特征,计算BRIEF描述子
b)通过BoW去搜索匹配到的闭环候选帧
c)在小窗口范围进行特征匹配(这里只对之前的Harris特征进行基础矩阵求解,因为只有这些特征点具有深度),用fundamentalmatrix+RANSAC去outliers
d)利用共视的特征点,将得到的闭环帧放入当前的滑动窗口进行优化。这里闭环帧的位姿是被固定的。
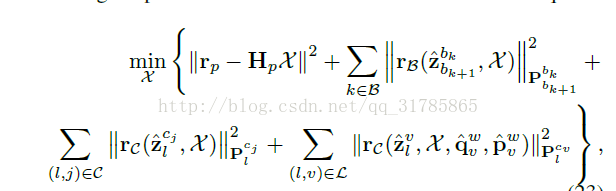
e)4自由度的位姿图优化
这里roll,pitch是可观的,不进行优化。
f) 关键帧地图的构建节点:每次margin后的关键帧,每3帧插入1帧
边1:连续的两帧
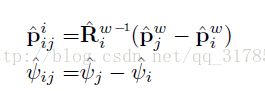
边2:闭环检测得到的帧间关系
这几个边都是一个4自由度的变量,平移量+yew角














 439
439











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









