Orbbec Astra Pro传感器在ROS(indigo和kinetic)使用说明 rgb depth同时显示
这款摄像头使用uvc输入彩色信息,需要libuvc和libuvc_ros这样才能在ROS正常使用彩色功能。
请在下面网址,分别下载对应包:
1 https://github.com/ktossell
2 https://orbbec3d.com/develop/
也可以直接下载打包好的资源:
http://download.csdn.net/detail/zhangrelay/9705366
首先安装驱动,依据版本选择下载驱动中合适的版本:
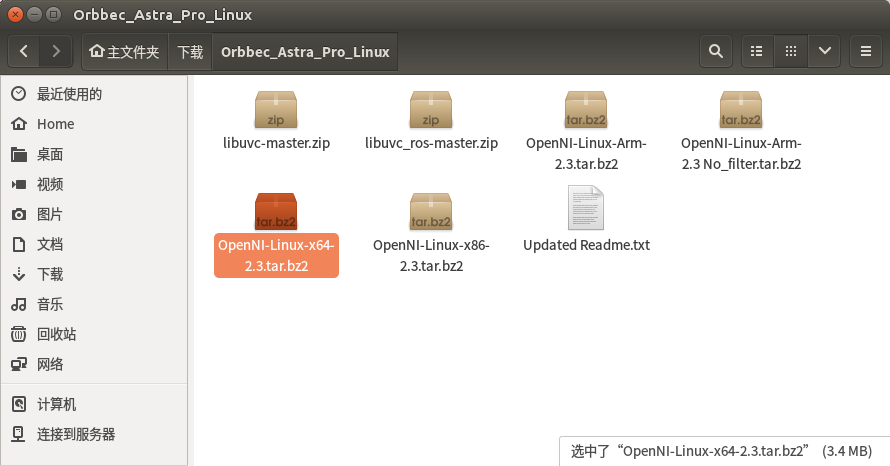
依据下列文档说明进行安装:特别注意标出部分
#############Note###################
# For user with ARM based development board:
# With CPU Structure older than Cortex A17, use OpenNI-Linux-Arm-2.3 Nofilter.tar for better performance
####################################
# There are two zip files, one is for 32bit machine, the other one is for 64bit
# We choose 64bit(x64) and make the example as follows:
这里应为系统是Ubuntu 16.04 64bit PC选择对应64bit版本
# To run visual samples(e.g., SimpleViewer), you will need freeglut3 header and libaries, please install:
$ sudo apt-get install build-essential freeglut3 freeglut3-dev
#check udev version, Orbbec Driver need libudev.so.1, if can't find it, can make symbolic link from libudev.so.x.x,
#which usually locate in /lib/x86_64-linux-gnu or /lib/i386-linux-gnu
$ldconfig -p | grep libudev.so.1
$cd /lib/x86_64-linux-gnu
$sudo ln -s libudev.so.x.x.x libudev.so.1
# copy tgz file to any place you want(e.g., Home)
# unzip tgz file
拷贝到对应文件夹并解压缩:
$ tar zxvf OpenNI-Linux-x64-2.2-0118.tgz
$ cd OpenNI-Linux-x64-2.2
# run install.sh to generate OpenNIDevEnvironment, which contains OpenNI development environment
$ sudo ./install.sh
# please replug in the device for usb-register
# add environment variables
$ source OpenNIDevEnvironment
# build sample(e.g., SimpleViewer)
$ cd Samples/SimpleViewer
$ make
# run sample
# connect sensor
$ cd Bin/x64-Release
$ ./SimpleViewer
# now you should be able to see a GUI window showing the depth stream video
# If the Debian Jessie Lite is used for testing, it may require the following installation for properly start the viewer.
$ sudo apt-get install libgl1-mesa-dri
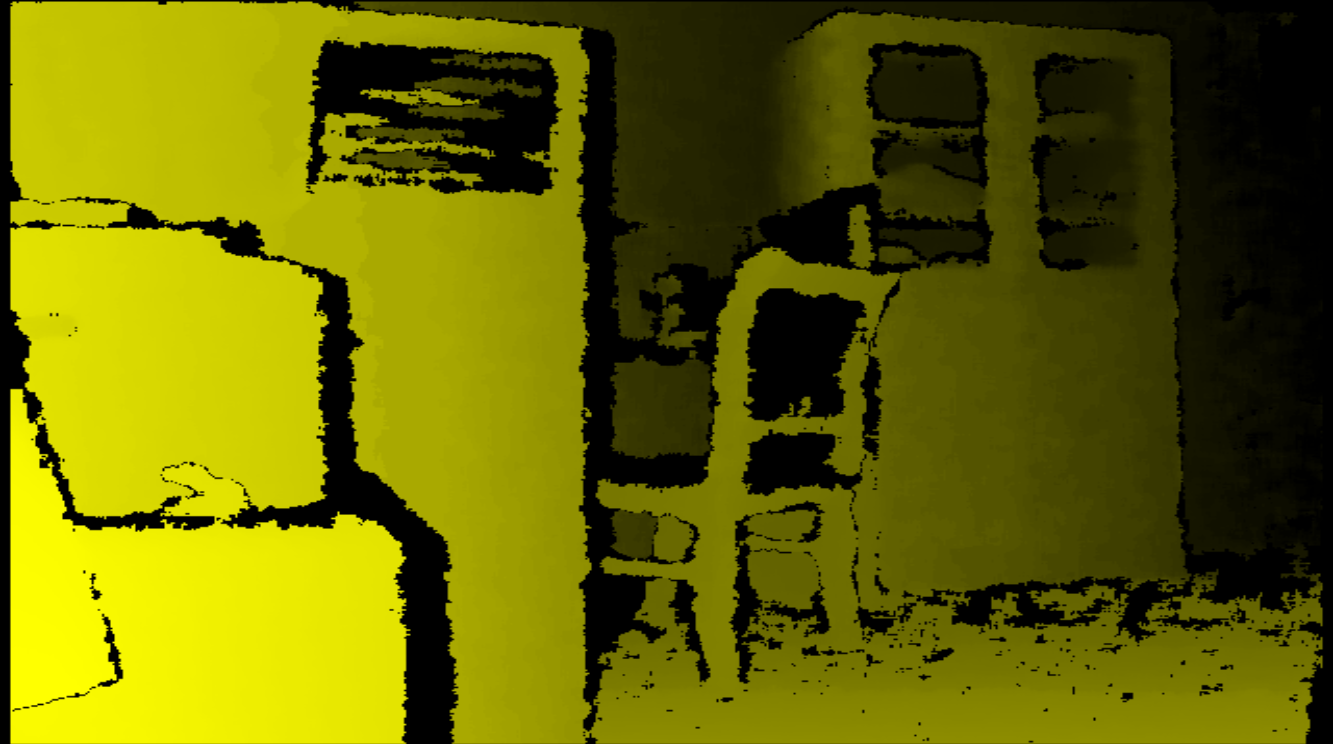
安装完毕后,进行功能测试:
- ~/tools/OpenNI-Linux-x64-2.3/Samples/Bin$ ls
- ClosestPointViewer MultiDepthViewer org.openni.jar
- EventBasedRead MultipleStreamRead org.openni.Samples.SimpleViewer
- libMWClosestPoint.so MWClosestPointApp org.openni.Samples.SimpleViewer.jar
- libOpenNI2.jni.so OpenNI2 SimpleRead
- libOpenNI2.so OpenNI.ini SimpleViewer
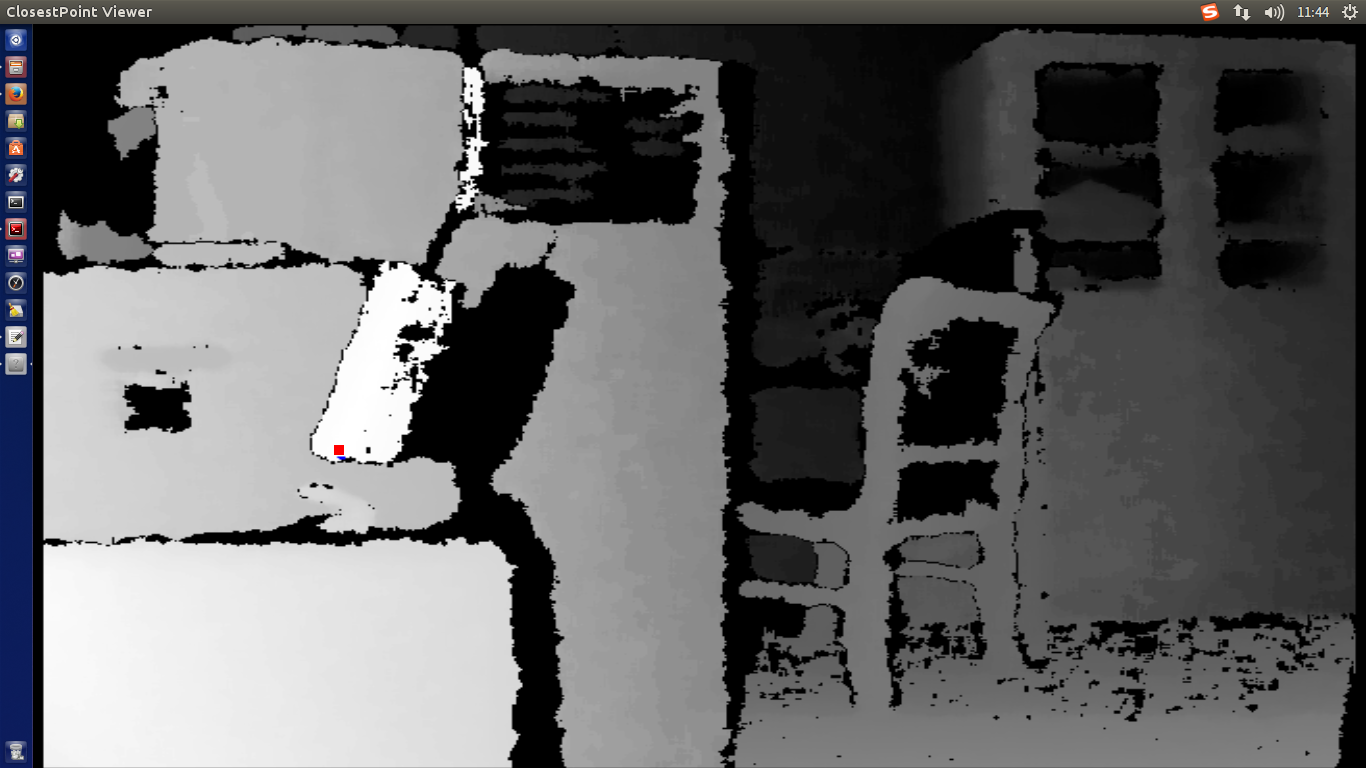
使用./SimpleViewer和./ClosestPointViewer,注意传感器特性,深度视觉0.4-8.0米,如下:
安装ROS功能包,以kinetic为例,indigo类似:
- ~$ sudo apt-get install ros-kinetic-astra-camera ros-kinetic-astra-launch
完毕后,使用:
- relaybotbox@relaybotbox-desktop:~$ roslaunch astra_launch
- astra.launch device.launch pointclouds.launch
- astra_tf_prefix.launch ir.launch processing.launch
- color.launch kinect_frames.launch
- depth.launch manager.launch
- relaybotbox@relaybotbox-desktop:~$ roslaunch astra_launch astra.launch
工作正常的话可以看到:
- ~$ roslaunch astra_launch astra.launch
- ... logging to /home/relaybotbox/.ros/log/26bcfad8-bcf9-11e6-bc52-00e0b4159b09/roslaunch-relaybotbox-desktop-6834.log
- Checking log directory for disk usage. This may take awhile.
- Press Ctrl-C to interrupt
- Done checking log file disk usage. Usage is <1GB.
-
- started roslaunch server http://relaybotbox-desktop:33177/
-
- SUMMARY
- ========
-
- PARAMETERS
- * /camera/camera_nodelet_manager/num_worker_threads: 4
- * /camera/depth_rectify_depth/interpolation: 0
- * /camera/driver/auto_exposure: True
- * /camera/driver/auto_white_balance: True
- * /camera/driver/color_depth_synchronization: False
- * /camera/driver/depth_camera_info_url:
- * /camera/driver/depth_frame_id: camera_depth_opti...
- * /camera/driver/depth_registration: False
- * /camera/driver/device_id: #1
- * /camera/driver/rgb_camera_info_url:
- * /camera/driver/rgb_frame_id: camera_rgb_optica...
- * /rosdistro: kinetic
- * /rosversion: 1.12.6
-
- NODES
- /camera/
- camera_nodelet_manager (nodelet/nodelet)
- depth_metric (nodelet/nodelet)
- depth_metric_rect (nodelet/nodelet)
- depth_points (nodelet/nodelet)
- depth_rectify_depth (nodelet/nodelet)
- depth_registered_sw_metric_rect (nodelet/nodelet)
- driver (nodelet/nodelet)
- points_xyzrgb_sw_registered (nodelet/nodelet)
- register_depth_rgb (nodelet/nodelet)
- rgb_rectify_color (nodelet/nodelet)
- /
- camera_base_link (tf2_ros/static_transform_publisher)
- camera_base_link1 (tf2_ros/static_transform_publisher)
- camera_base_link2 (tf2_ros/static_transform_publisher)
- camera_base_link3 (tf2_ros/static_transform_publisher)
-
- auto-starting new master
- process[master]: started with pid [6848]
- ROS_MASTER_URI=http://localhost:11311
-
- setting /run_id to 26bcfad8-bcf9-11e6-bc52-00e0b4159b09
- process[rosout-1]: started with pid [6861]
- started core service [/rosout]
- process[camera/camera_nodelet_manager-2]: started with pid [6864]
- process[camera/driver-3]: started with pid [6865]
- process[camera/rgb_rectify_color-4]: started with pid [6867]
- process[camera/depth_rectify_depth-5]: started with pid [6878]
- process[camera/depth_metric_rect-6]: started with pid [6896]
- process[camera/depth_metric-7]: started with pid [6912]
- process[camera/depth_points-8]: started with pid [6920]
- process[camera/register_depth_rgb-9]: started with pid [6938]
- process[camera/points_xyzrgb_sw_registered-10]: started with pid [6949]
- process[camera_base_link-12]: started with pid [6970]
- process[camera_base_link1-13]: started with pid [6986]
- process[camera_base_link2-14]: started with pid [6997]
- process[camera_base_link3-15]: started with pid [7008]
- [ INFO] [1481168899.738014182]: Initializing nodelet with 4 worker threads.
- [ INFO] [1481168900.562120390]: Device "2bc5/0403@2/5" found.
- Warning: USB events thread - failed to set priority. This might cause loss of data...
使用rqt_image_view:
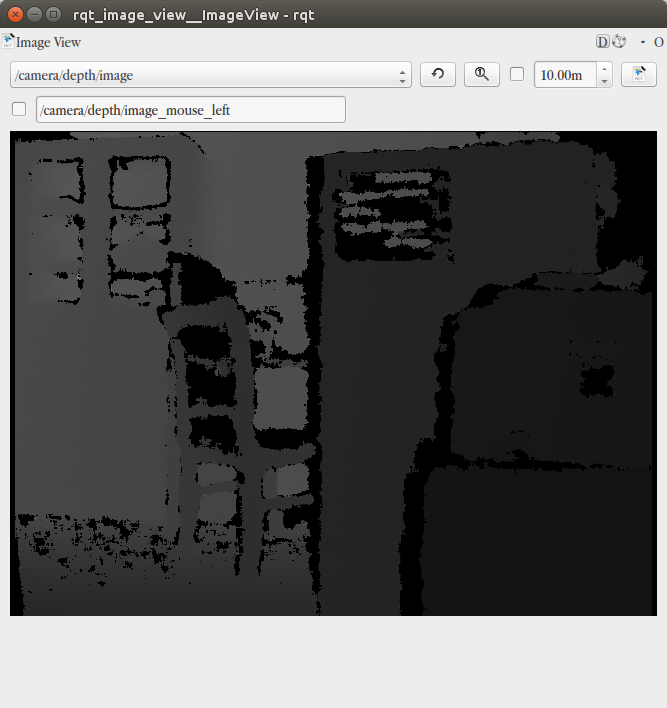
发现rgb并没有正确显示??需要UVC支持。
编译libuvc过程如下:注意红色部分
`libuvc` is a cross-platform library for USB video devices, built atop `libusb`.
It enables fine-grained control over USB video devices exporting the standard USB Video Class
(UVC) interface, enabling developers to write drivers for previously unsupported devices,
or just access UVC devices in a generic fashion.
## Getting and Building libuvc
Prerequisites: You will need `libusb` and [CMake](http://www.cmake.org/) installed.
To build, you can just run these shell commands:
Git clone https://github.com/ktossell/libuvc
cd libuvc
mkdir build
cd build
cmake ..
make && sudo make install
and you're set! If you want to change the build configuration, you can edit `CMakeCache.txt`
in the build directory, or use a CMake GUI to make the desired changes.
## Developing with libuvc
The documentation for `libuvc` can currently be found at https://int80k.com/libuvc/doc/.
然后编译libuvc_ros:注意红色部分
`libuvc_camera` is a ROS driver that supports webcams and other UVC-standards-compliant video devices.
It's a cross-platform replacement for `uvc_camera`, a Linux-only webcam driver.
Documentation is available on the ROS wiki: [libuvc_camera](http://wiki.ros.org/libuvc_camera).
使用catkin_make,如果报错,注意libusb.h的位置。使用locate libusb.h,并将其放到合适位置:
~$ sudo cp /usr/include/libusb-1.0/libusb.h /usr/local/include/libuvc/
修改下libuvc.h中include中的路径。
在启动roscore后,使用:
~$ rosrun libuvc_camera camera_node
查看rgb。
- ~$ rosrun libuvc_camera camera_node
- [ INFO] [1481169521.460856223]: Opening camera with vendor=0x0, product=0x0, serial="", index=0
- [ERROR] [1481169521.461465837]: Permission denied opening /dev/bus/usb/002/004
出现报错,修改端口权限,重试。
- [ERROR] [1481169521.461465837]: Permission denied opening /dev/bus/usb/002/004
- relaybotbox@relaybotbox-desktop:~$ sudo chmod 777 /dev/bus/usb/002/004
- [sudo] relaybotbox 的密码:
- relaybotbox@relaybotbox-desktop:~$ rosrun libuvc_camera camera_node
- [ INFO] [1481169588.328108966]: Opening camera with vendor=0x0, product=0x0, serial="", index=0
- unsupported descriptor subtype: 13
- unsupported descriptor subtype: 13
- [ WARN] [1481169589.131025001]: Unable to set scanning_mode to 0
- [ WARN] [1481169589.132290563]: Unable to set auto_exposure to 8
- [ WARN] [1481169589.133330942]: Unable to set auto_exposure_priority to 0
- [ WARN] [1481169589.135009273]: Unable to set exposure_absolute to 1
- [ WARN] [1481169589.136271211]: Unable to set auto_focus to 1
- [ WARN] [1481169589.137170759]: Unable to set focus_absolute to 0
- [ WARN] [1481169589.138442322]: Unable to set gain to 0
- [ WARN] [1481169589.140162069]: Unable to set iris_absolute to 0
- [ WARN] [1481169589.141553880]: Unable to set pantilt to 0, 0
- [ INFO] [1481169589.273060465]: using default calibration URL
- [ INFO] [1481169589.273198871]: camera calibration URL: file:///home/relaybotbox/.ros/camera_info/camera.yaml
- [ INFO] [1481169589.273354822]: Unable to open camera calibration file [/home/relaybotbox/.ros/camera_info/camera.yaml]
- [ WARN] [1481169589.273418390]: Camera calibration file /home/relaybotbox/.ros/camera_info/camera.yaml not found.
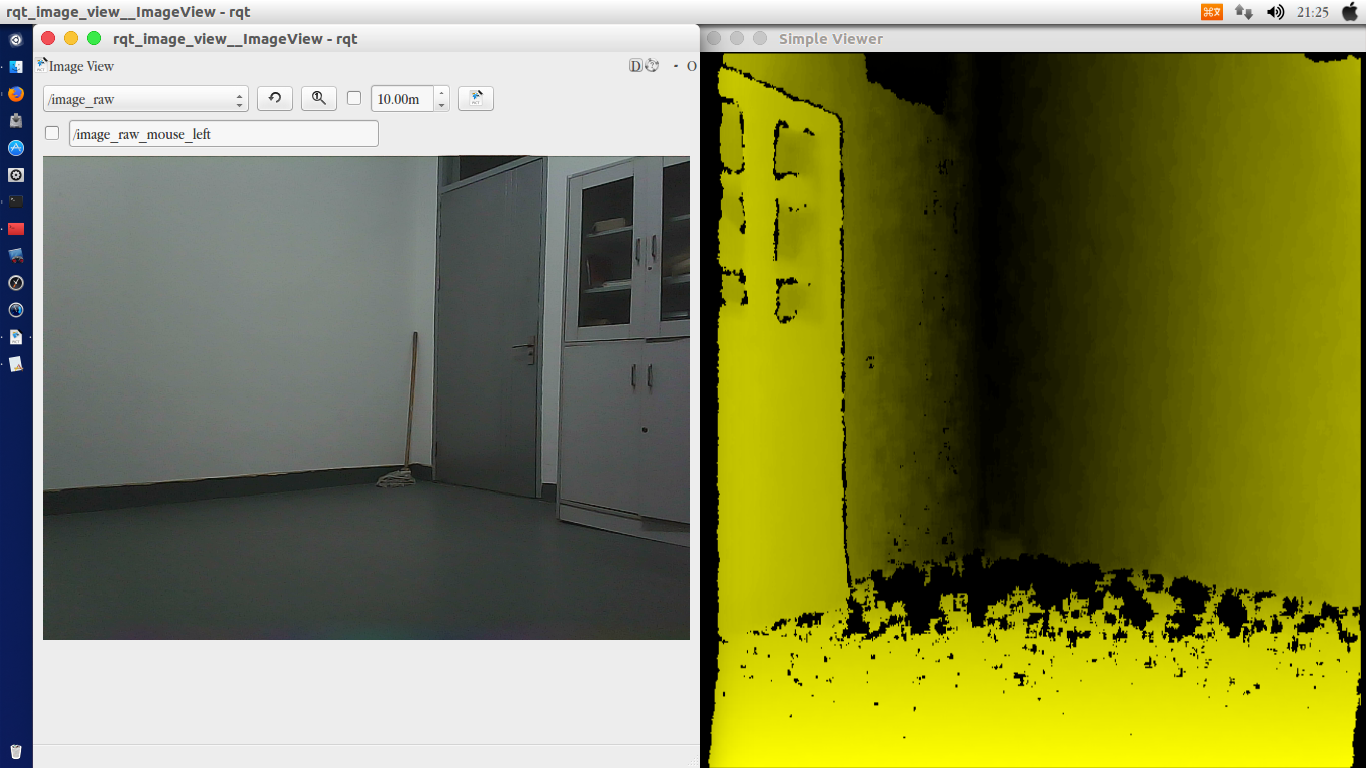
使用 rqt_image_view ,查看rgb如下:
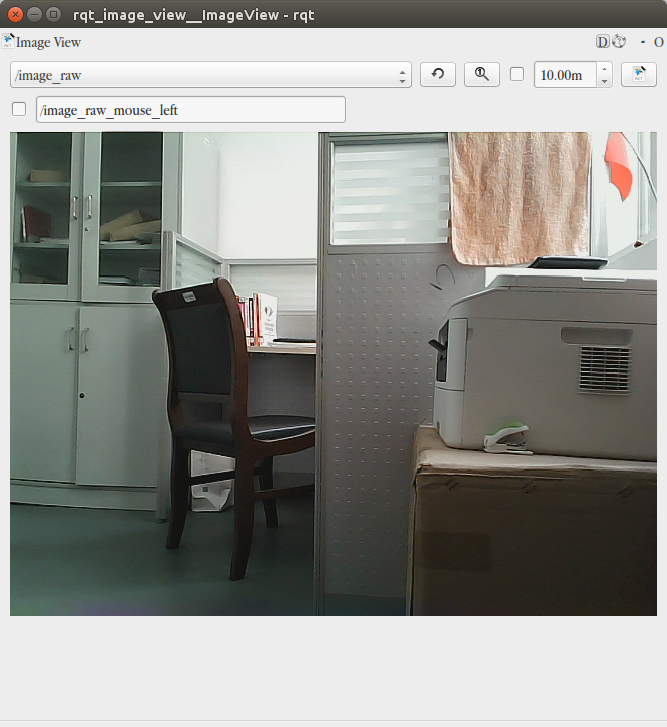
同时使用也是可以的。
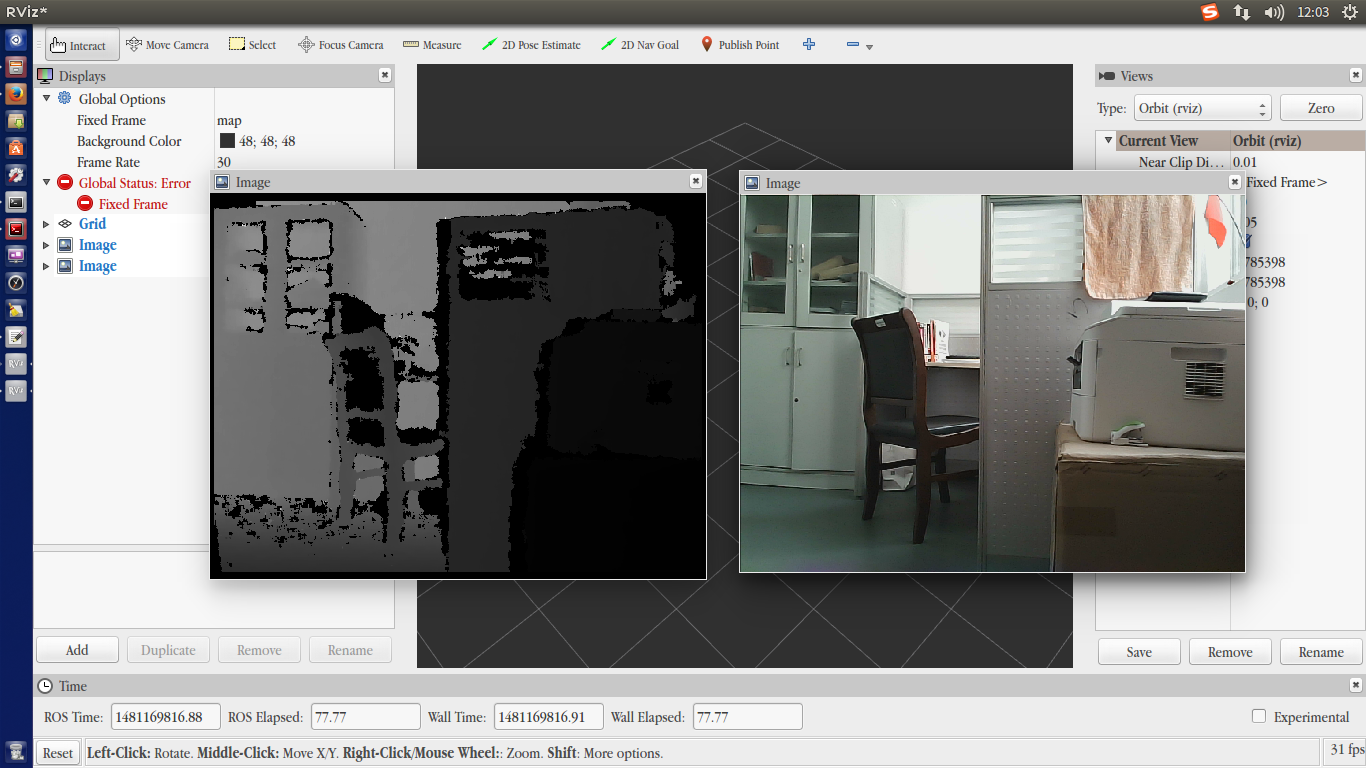
安装配置完毕,可以开始使用这款视觉传感器了。
上面的内容为转载内容,出处:http://blog.csdn.net/zhangrelay/article/details/53515859

























 1864
1864











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









