







编译 | AI科技大本营
参与 | 林椿眄
编辑 | 明明
美国时间周日晚 10 点左右,Uber 的一辆自动驾驶汽车在亚利桑那州 Tempe 市发生交通事故,与一名正在过马路的行人相撞,随后该女子在送往医院后不治身亡。据称,Uber 在撞上该行人时,正处在自动驾驶状态。
▌警方表态
根据美国亚利桑那州坦佩市警察局局长 Sylvia Moir 在接受《旧金山纪事报》采访时表示:经过初步调查,此次事故的主要责任可能要由受害者本人,49 岁的 Elaine Herzberg 承担。
Sylvia Moir 称,从沃尔沃的无人 SUV 汽车上摄像机拍摄回来的视频来看,“可以明显地看到,根据受害者的阴影可以判定其进入道路的方式。可以说,不论是自动驾驶模式还是人为驾驶模式,都难以避免此次事故的发生。”此次事故发生的地点是距离人行横道 100 码的位置。在傍晚时分,即使是穿过照明状况良好的人行横道也很危险。”
虽然此次事故车辆是一辆无人驾驶车,但车内前排座位上还坐有一位司机。然而,Moir 表示,在事故发生前该司机似乎没有进行干预,“这名司机说在事故发生时他的眼前好像闪过一道光,有个人在他的车前面走了过去,发出的第一声警报就是事故发生的碰撞声。”
事故初步调查结果表明,Uber 的自动驾驶汽车在限速 35 英里的地区,但它以 38 英里的时速超速行驶,在事故发生前并没有任何减速刹车的迹象。据称,受害者 Herzberg 是突然从道路的中间位置走到车行道上的。警方认为她可能无家可归。
目前,Tempe 警方计划正与国家运输安全委员会及国家高速公路交通安全管理局的调查人员合作,进一步调查此次事故,并会给民众一个交代。
▌解密 Uber 自动驾驶系统
“意外进入行驶路径”的事情几乎是自动驾驶汽车工程师首先考虑的突发事件。这种情况有很多,例如突然停下来的汽车、鹿、行人——工程师在设计自动驾驶系统时会尽早检查到他们,确认并采取减速、停车、转弯等适当措施。

Uber 自动驾驶汽车配备了几种不同的成像系统,这些系统既可以执行普通任务(监控附近车辆、标记和车道标线),也可以用于执行上述特殊任务。在这起事故中,能够拯救受害者的图像系统应该不少于四个。
1、顶部激光雷达
这个位于汽车顶部的桶状物体就是激光雷达系统,它能够以每秒多次的速度生成汽车周围的 3D 成像。利用红外激光脉冲将物体反射回传感器,激光雷达可以在白天或晚上非常详细地检测静止和移动的物体。
大雪和浓雾可能遮挡激光雷达的激光,其准确性会随着射程的降低而降低,但对于几英尺到几百英尺内的事物来说,顶部激光雷达依旧是非常重要的成像工具,几乎存在于每辆自动驾驶汽车上。

激光雷达生成的影像
如果操作正确,激光雷达在没有被完全遮挡的情况下,应该能够分辨出人。同时,汽车距离行人有 100 多英尺远(30 多米),可以把行人成像传送给“大脑”进行核对。
2、前端雷达
和激光雷达一样,雷达发出信号,等待其反弹,但它使用的是无线电波,而不是激光。这使得雷达具有更强的抗干扰能力,因为无线电可以穿透雪和雾,但也会降低分辨率,并改变其射程曲线。
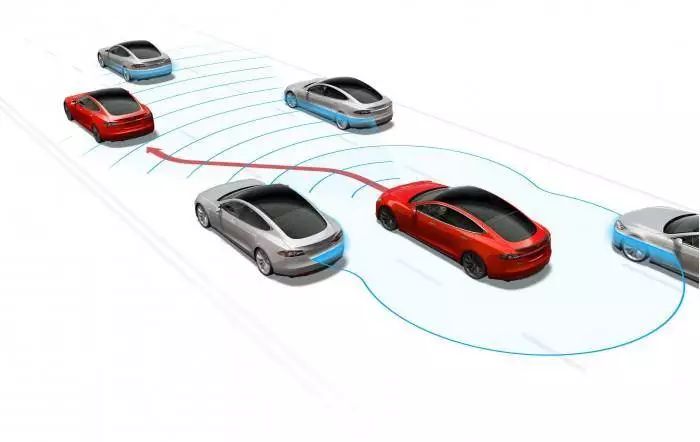
特斯拉自动驾驶系统Autopilot主要依赖雷达
根据 Uber 部署的雷达数量不同,其提供的距离像可能存在巨大差异。Uber 很可能在汽车前后部署了多个雷达,以实现 360 度无死角覆盖。如果 Uber 是为了给激光雷达提供补充,那么雷达与激光雷达的成像可能会存在大幅重叠,但是更多雷达可以用于是识别其他车辆和更大型的障碍物。
3、短焦和长焦光学相机
激光雷达和雷达易于确定物体的形状,但并不擅长读取标记,理解物体颜色等。这个任务就交给了可见光相机,它内置了精密的计算机视觉算法,能够对成像进行实时分析。
Uber 自动驾驶汽车上的相机可以看到指示器标记,制动汽车刹车(交通信号灯以及穿越十字路口行人)。汽车前端尤其会使用多角度、多种类型的相机,这样才能获取汽车前进道路的完整图像。
检测行人是工程师们试图解决的最常见问题之一,这种算法已经非常成熟。这一过程通常被称作图像分割,一般还会涉及识别标志、树木、人行道等等。
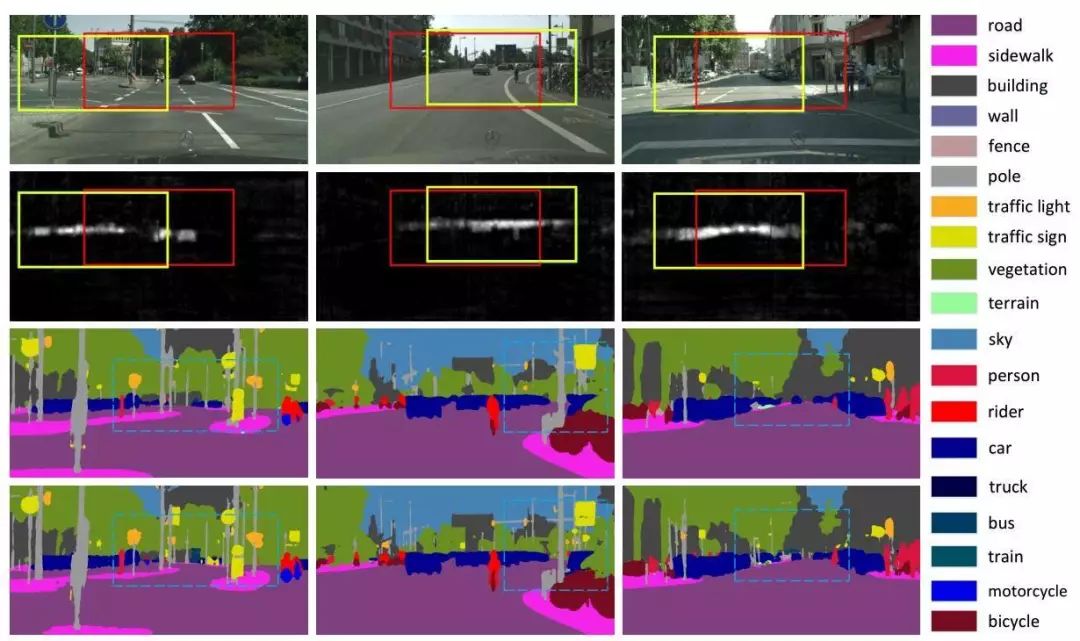
光学相机拍摄的图像
对于相机来说,夜间工作很困难,这是一个显而易见的问题。不过,这个问题可以交给激光雷达和雷达来解决。即便是在漆黑的夜晚,一个穿着全黑衣服的人也能够被激光雷达和雷达识别。这些雷达会向汽车发出警告,应该减速或者通过汽车大灯确认行人。这可能就是自动驾驶汽车通常没有夜间视觉系统的原因(我不能确定 Uber 汽车上没有)。
4、安全驾驶员
人类很擅长发现障碍物,即便是人眼没有激光器。虽然人类的反应时间不是最好的,但是如果汽车没有反应或反应错误,经过培训的安去驾驶员会作出正确的反应。
值得一提的是,自动驾驶汽车中还有一个中央计算单元,它能够收集各个传感器提供的信息,然后生成一个更加完整的汽车周围环境成像。在超越了简单的对象识别后,自动驾驶汽车开始引入更广泛的智能概念,如对象持久性,预测行为等。
▌自动驾驶响应步骤
1、明白所处位置
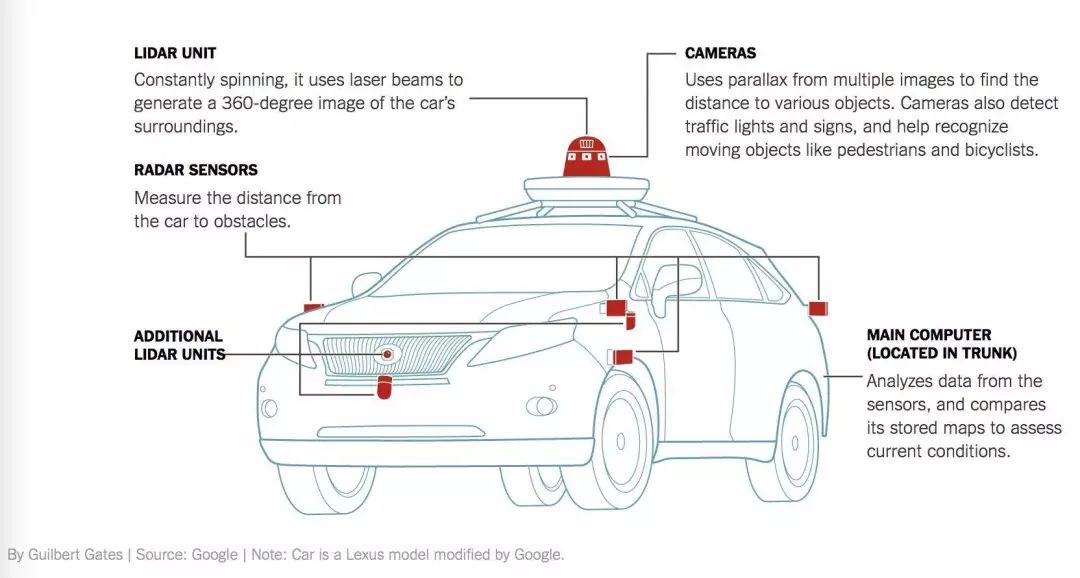
在设计自动驾驶汽车时,像 Uber 和 Waymo 这样的公司,首先要建立一个周围环境的三维地图。 他们为普通汽车配备了激光雷达传感器,这是一种“光探测和测距”设备,它使用光脉冲信号来测量距离。当工作人员在道路上驾驶这些汽车时,车上的这些设备会自动收集制作地图所需的信息。
一旦地图制作完成,自动驾驶汽车在行驶中就可以自行导航。 不仅如此,自动驾驶汽车还将持续地使用激光雷达来追踪行驶过程中的周围环境,并将其所看到的内容与地图显示的内容进行比较。 通过这种方式,自动驾驶汽车就能够很好地了解它所处的地理位置。
此外,激光雷达还将对车辆附近的物体发出警告,包括其他汽车,行人和骑自行车的人。
2、配备雷达等传感器
自动驾驶汽车车载雷达有着良好的工作性能,但它也有很大的局限性。它只能提供周围近距离物体的信息,这个弊端严重限制了自动驾驶汽车的驾驶速度。此外,它的距离测量结果并不总是足够清晰,也无法准确地区分一个对象。 更重要的是,当多辆自动驾驶汽车行驶在同一条道路时,它们发出的激光雷达信号可能会相互干扰。
即使在激光雷达运行良好的情况下,这些无人车公司也需要一个备份系统。 因此大多数无人驾驶汽车还配备了各种其他传感器,例如相机,雷达和GPS天线等。
借助 GPS 天线,Uber 和 Waymo 等公司正在为其无人车提供更多关于所处的地理位置的信息。 使用摄像头和雷达传感器,还可以收集有关附近行人,骑车人,其他汽车及物体等附加信息。
此外,摄像头还提供了识别交通信号灯、交通路牌、道路标记及其他汽车行驶过程中需要注意的信号等功能。
3、响应路面信息
这是无人车驾驶系统最难的部分,需要一个能够实时筛选所有数据并做出快速响应的系统,这是非常复杂的一个过程。
在有些情况下,工程师会编写特定的规则来定义无人车在特定情况下应该如何应对。 例如,当 Waymo 的无人车检测当前信号为红灯时,则会停止一切程序让无人车停下。
但是,一个团队的工程师们无法做到为自动驾驶汽车可能遇到的每种情况都制定相应的规则。 因此像 Waymo 和 Uber 这样的公司开始依赖“机器学习”系统,通过分析大量的路面数据来让系统自动模拟学习车辆的行为。
Waymo 的自动驾驶汽车目前所使用的一个系统,正是通过分析数千张道路照片的方法来识别路面上走路或跑步的行人。
参考:
1:http://fortune.com/2018/03/19/uber-self-driving-car-crash/
2:https://techcrunch.com/2018/03/19/heres-how-ubers-self-driving-cars-are-supposed-to-detect-pedestrians/
3:https://www.nytimes.com/2018/03/19/technology/how-driverless-cars-work.html
新一年,AI科技大本营的目标更加明确,有更多的想法需要落地,不过目前对于营长来说是“现实跟不上灵魂的脚步”,因为缺人~~
所以,AI科技大本营要壮大队伍了,现招聘AI记者和资深编译,有意者请将简历投至:gulei@csdn.net,期待你的加入!
如果你暂时不能加入营长的队伍,也欢迎与营长分享你的精彩文章,投稿邮箱:suiling@csdn.net
AI科技大本营读者群(计算机视觉、机器学习、深度学习、NLP、Python、AI硬件、AI+金融、AI+PM方向)正在招募中,关注AI科技大本营微信公众号,后台回复:读者群,联系营长,添加营长请备注姓名,研究方向。




☟☟☟点击 | 阅读原文 | 查看更多精彩内容














 4495
4495











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









