






摄像头标定在视频处理的很多场景下需要用到,比如需要计算视频画面上的一个目标距离摄像头安装点的位置,又比如需要把摄像头画面上的目标映射到一个电子地图上等。
其实这个问题的核心涉及到两个平面之间的坐标转换,通过两个平面直接的映射关系,还原物体的实际空间位置。相机标定的相关理论最著名是张正友的相机标定理论,该理论在开源项目OpenCV下有具体实现Camera Calibration and 3D Reconstruction。这里面有一点需要注意的是需要考虑到摄像头的畸变(扭曲)。如果不考虑畸变,模型相对比较简单(针孔相机模型)。考虑畸变之后,模型复杂很多,而且标定步骤也会增加。
实际项目中基于算法和标定复杂度考虑,采用了针孔相机模型(即投影变换),忽略摄像头畸变造成的影响,实际效果还可以,误差在用户接受的范围之内。
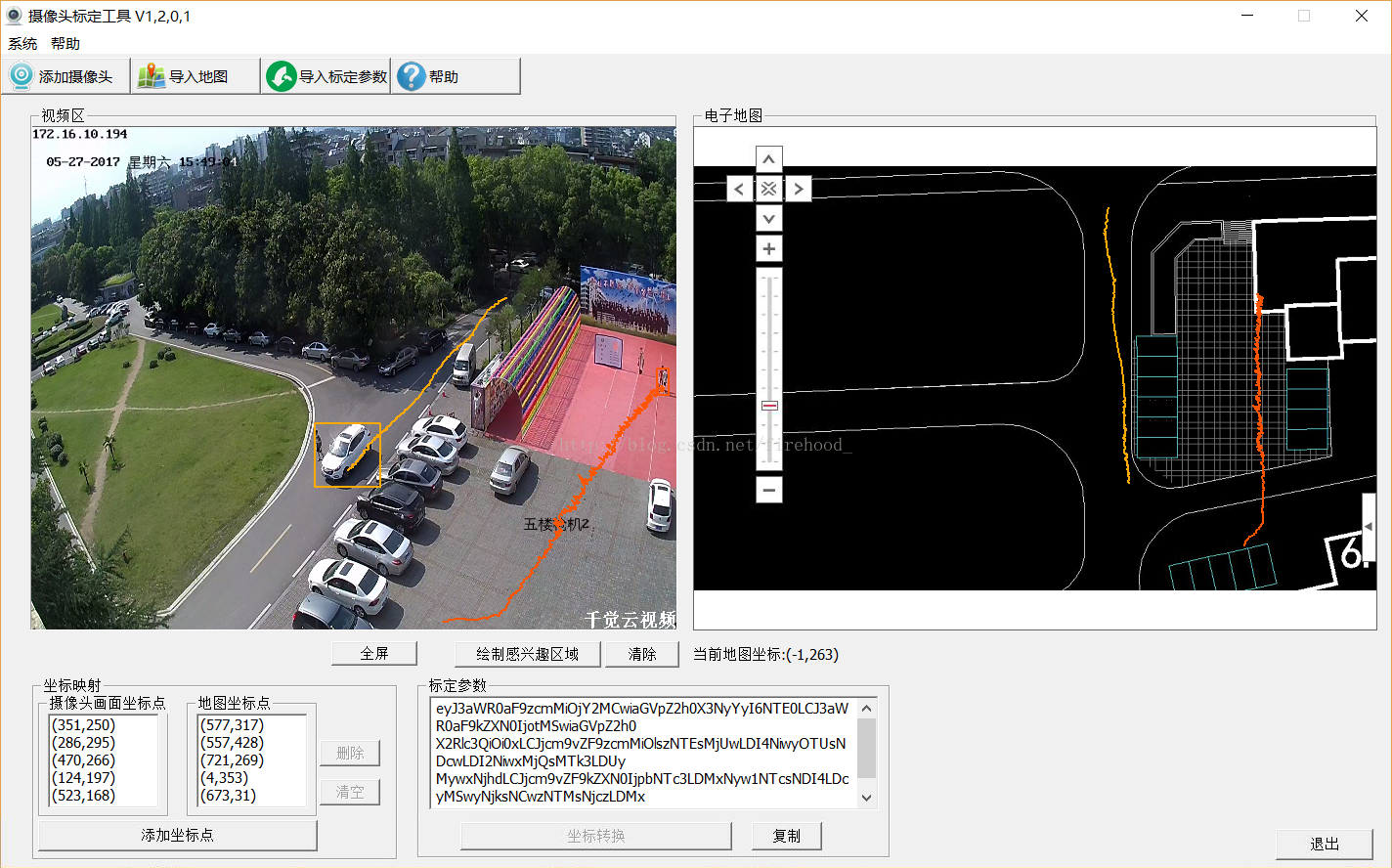
以下是基于摄像头标定库实现的摄像头标定工具。工具的目的是将摄像头画面上的任一点坐标转换到对应的电子地图上,计算出对应的转换参数(映射关系)。
摄像头标定时需要至少标定4个点(摄像头画面上的4个点和与之对应的电子地图上的四个点),标定的点越多,准确度越高,得到的转换参数越精确。
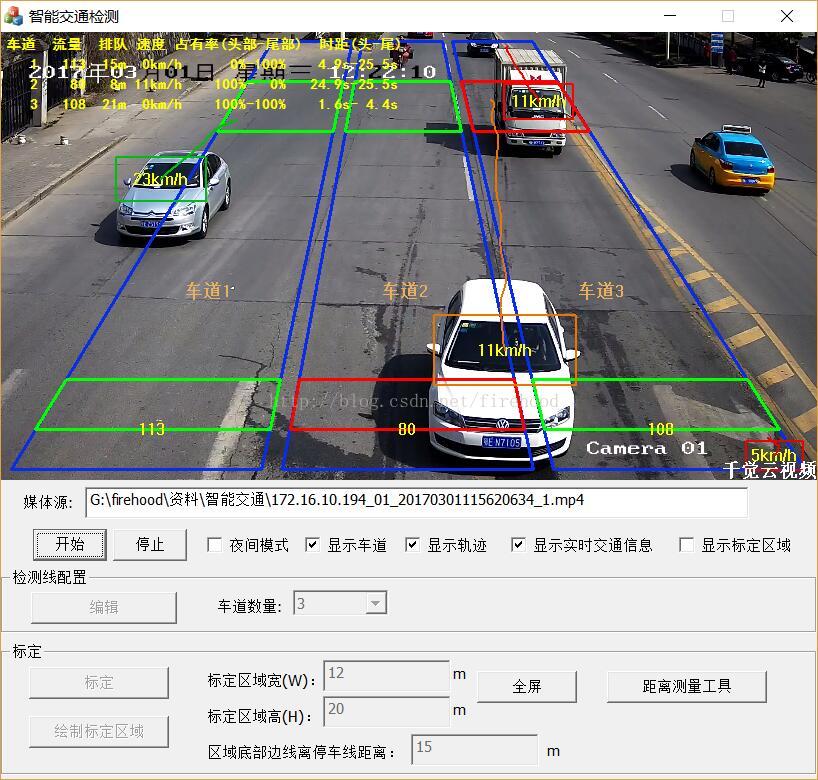
以下是智能交通的应用,其中车速和排队长度统计基于标定算法实现。














 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









