









矩阵A的伪逆(Moore-Penrose pseudoinverse)定义为:A+=VD+UT,其中,U,D和V是矩阵A奇异值分解后得到的矩阵。对角矩阵D的伪逆D+是非零元素取倒数之后再转置得到的。
当矩阵A的列数多于行数时,使用伪逆求解线性方程是众多可能解法中的一种。特别地,x=A+y是方程所有可行解中欧几里得范数‖x‖2最小的一个。
当矩阵A的行数多于列数时,可能没有解。在这种情况下,通过伪逆得到的x使得Ax和y的欧几里得距离‖Ax-y‖2最小。
广义逆阵(generalized inverse)也称为伪逆矩阵(pseudoinverse),是在数学矩阵领域内的名词,一矩阵A的广义逆阵是指另一矩阵具有部分逆矩阵的特性,但是不一定具有逆矩阵的所有特性。假设一矩阵A∈Rn*m及另一矩阵Ag∈m*n,若Ag满足此条件,AAgA=A,则Ag即为A的逆矩阵。构建广义逆阵的目的是针对可逆矩阵以外的矩阵(例如非方阵的矩阵)可以找到一矩阵有一些类似逆矩阵的特性。任意的矩阵都存在广义逆阵,若一矩阵存在逆矩阵,逆矩阵即为其唯一的广义逆阵。有些广义逆阵可以定义在和结合律乘法有关的数学结构中。可以借助SVD(奇异值分解)来求解伪逆。
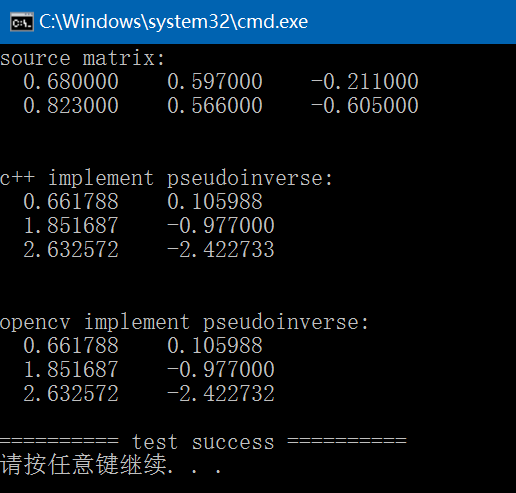
以下是分别采用C++和OpenCV实现的求矩阵伪逆:
#include "funset.hpp"
#include <math.h>
#include <iostream>
#include <string>
#include <vector>
#include <opencv2/opencv.hpp>
#include "common.hpp"
// ================================= 求伪逆矩阵 =================================
template<typename _Tp>
int pinv(const std::vector<std::vector<_Tp>>& src, std::vector<std::vector<_Tp>>& dst, _Tp tolerance)
{
std::vector<std::vector<_Tp>> D, U, Vt;
if (svd(src, D, U, Vt) != 0) {
fprintf(stderr, "singular value decomposition fail\n");
return -1;
}
int m = src.size();
int n = src[0].size();
std::vector<std::vector<_Tp>> Drecip, DrecipT, Ut, V;
transpose(Vt, V);
transpose(U, Ut);
if (m < n)
std::swap(m, n);
Drecip.resize(n);
for (int i = 0; i < n; ++i) {
Drecip[i].resize(m, (_Tp)0);
if (D[i][0] > tolerance)
Drecip[i][i] = 1.0f / D[i][0];
}
if (src.size() < src[0].size())
transpose(Drecip, DrecipT);
else
DrecipT = Drecip;
std::vector<std::vector<_Tp>> tmp = matrix_mul(V, DrecipT);
dst = matrix_mul(tmp, Ut);
return 0;
}
template<typename _Tp> // mat1(m, n) * mat2(n, p) => result(m, p)
static std::vector<std::vector<_Tp>> matrix_mul(const std::vector<std::vector<_Tp>>& mat1, const std::vector<std::vector<_Tp>>& mat2)
{
std::vector<std::vector<_Tp>> result;
int m1 = mat1.size(), n1 = mat1[0].size();
int m2 = mat2.size(), n2 = mat2[0].size();
if (n1 != m2) {
fprintf(stderr, "mat dimension dismatch\n");
return result;
}
result.resize(m1);
for (int i = 0; i < m1; ++i) {
result[i].resize(n2, (_Tp)0);
}
for (int y = 0; y < m1; ++y) {
for (int x = 0; x < n2; ++x) {
for (int t = 0; t < n1; ++t) {
result[y][x] += mat1[y][t] * mat2[t][x];
}
}
}
return result;
}
// ================================= 矩阵奇异值分解 =================================
template<typename _Tp>
static void JacobiSVD(std::vector<std::vector<_Tp>>& At,
std::vector<std::vector<_Tp>>& _W, std::vector<std::vector<_Tp>>& Vt)
{
double minval = FLT_MIN;
_Tp eps = (_Tp)(FLT_EPSILON * 2);
const int m = At[0].size();
const int n = _W.size();
const int n1 = m; // urows
std::vector<double> W(n, 0.);
for (int i = 0; i < n; i++) {
double sd{0.};
for (int k = 0; k < m; k++) {
_Tp t = At[i][k];
sd += (double)t*t;
}
W[i] = sd;
for (int k = 0; k < n; k++)
Vt[i][k] = 0;
Vt[i][i] = 1;
}
int max_iter = std::max(m, 30);
for (int iter = 0; iter < max_iter; iter++) {
bool changed = false;
_Tp c, s;
for (int i = 0; i < n - 1; i++) {
for (int j = i + 1; j < n; j++) {
_Tp *Ai = At[i].data(), *Aj = At[j].data();
double a = W[i], p = 0, b = W[j];
for (int k = 0; k < m; k++)
p += (double)Ai[k] * Aj[k];
if (std::abs(p) <= eps * std::sqrt((double)a*b))
continue;
p *= 2;
double beta = a - b, gamma = hypot_((double)p, beta);
if (beta < 0) {
double delta = (gamma - beta)*0.5;
s = (_Tp)std::sqrt(delta / gamma);
c = (_Tp)(p / (gamma*s * 2));
} else {
c = (_Tp)std::sqrt((gamma + beta) / (gamma * 2));
s = (_Tp)(p / (gamma*c * 2));
}
a = b = 0;
for (int k = 0; k < m; k++) {
_Tp t0 = c*Ai[k] + s*Aj[k];
_Tp t1 = -s*Ai[k] + c*Aj[k];
Ai[k] = t0; Aj[k] = t1;
a += (double)t0*t0; b += (double)t1*t1;
}
W[i] = a; W[j] = b;
changed = true;
_Tp *Vi = Vt[i].data(), *Vj = Vt[j].data();
for (int k = 0; k < n; k++) {
_Tp t0 = c*Vi[k] + s*Vj[k];
_Tp t1 = -s*Vi[k] + c*Vj[k];
Vi[k] = t0; Vj[k] = t1;
}
}
}
if (!changed)
break;
}
for (int i = 0; i < n; i++) {
double sd{ 0. };
for (int k = 0; k < m; k++) {
_Tp t = At[i][k];
sd += (double)t*t;
}
W[i] = std::sqrt(sd);
}
for (int i = 0; i < n - 1; i++) {
int j = i;
for (int k = i + 1; k < n; k++) {
if (W[j] < W[k])
j = k;
}
if (i != j) {
std::swap(W[i], W[j]);
for (int k = 0; k < m; k++)
std::swap(At[i][k], At[j][k]);
for (int k = 0; k < n; k++)
std::swap(Vt[i][k], Vt[j][k]);
}
}
for (int i = 0; i < n; i++)
_W[i][0] = (_Tp)W[i];
srand(time(nullptr));
for (int i = 0; i < n1; i++) {
double sd = i < n ? W[i] : 0;
for (int ii = 0; ii < 100 && sd <= minval; ii++) {
// if we got a zero singular value, then in order to get the corresponding left singular vector
// we generate a random vector, project it to the previously computed left singular vectors,
// subtract the projection and normalize the difference.
const _Tp val0 = (_Tp)(1. / m);
for (int k = 0; k < m; k++) {
unsigned int rng = rand() % 4294967295; // 2^32 - 1
_Tp val = (rng & 256) != 0 ? val0 : -val0;
At[i][k] = val;
}
for (int iter = 0; iter < 2; iter++) {
for (int j = 0; j < i; j++) {
sd = 0;
for (int k = 0; k < m; k++)
sd += At[i][k] * At[j][k];
_Tp asum = 0;
for (int k = 0; k < m; k++) {
_Tp t = (_Tp)(At[i][k] - sd*At[j][k]);
At[i][k] = t;
asum += std::abs(t);
}
asum = asum > eps * 100 ? 1 / asum : 0;
for (int k = 0; k < m; k++)
At[i][k] *= asum;
}
}
sd = 0;
for (int k = 0; k < m; k++) {
_Tp t = At[i][k];
sd += (double)t*t;
}
sd = std::sqrt(sd);
}
_Tp s = (_Tp)(sd > minval ? 1 / sd : 0.);
for (int k = 0; k < m; k++)
At[i][k] *= s;
}
}
// matSrc为原始矩阵,支持非方阵,matD存放奇异值,matU存放左奇异向量,matVt存放转置的右奇异向量
template<typename _Tp>
int svd(const std::vector<std::vector<_Tp>>& matSrc,
std::vector<std::vector<_Tp>>& matD, std::vector<std::vector<_Tp>>& matU, std::vector<std::vector<_Tp>>& matVt)
{
int m = matSrc.size();
int n = matSrc[0].size();
for (const auto& sz : matSrc) {
if (n != sz.size()) {
fprintf(stderr, "matrix dimension dismatch\n");
return -1;
}
}
bool at = false;
if (m < n) {
std::swap(m, n);
at = true;
}
matD.resize(n);
for (int i = 0; i < n; ++i) {
matD[i].resize(1, (_Tp)0);
}
matU.resize(m);
for (int i = 0; i < m; ++i) {
matU[i].resize(m, (_Tp)0);
}
matVt.resize(n);
for (int i = 0; i < n; ++i) {
matVt[i].resize(n, (_Tp)0);
}
std::vector<std::vector<_Tp>> tmp_u = matU, tmp_v = matVt;
std::vector<std::vector<_Tp>> tmp_a, tmp_a_;
if (!at)
transpose(matSrc, tmp_a);
else
tmp_a = matSrc;
if (m == n) {
tmp_a_ = tmp_a;
} else {
tmp_a_.resize(m);
for (int i = 0; i < m; ++i) {
tmp_a_[i].resize(m, (_Tp)0);
}
for (int i = 0; i < n; ++i) {
tmp_a_[i].assign(tmp_a[i].begin(), tmp_a[i].end());
}
}
JacobiSVD(tmp_a_, matD, tmp_v);
if (!at) {
transpose(tmp_a_, matU);
matVt = tmp_v;
} else {
transpose(tmp_v, matU);
matVt = tmp_a_;
}
return 0;
}
int test_pseudoinverse()
{
//std::vector<std::vector<float>> vec{ { 0.68f, 0.597f },
// { -0.211f, 0.823f },
// { 0.566f, -0.605f } };
//const int rows{ 3 }, cols{ 2 };
std::vector<std::vector<float>> vec{ { 0.68f, 0.597f, -0.211f },
{ 0.823f, 0.566f, -0.605f } };
const int rows{ 2 }, cols{ 3 };
fprintf(stderr, "source matrix:\n");
print_matrix(vec);
fprintf(stderr, "\nc++ implement pseudoinverse:\n");
std::vector<std::vector<float>> pinv1;
float pinvtoler = 1.e-6;
if (pinv(vec, pinv1, pinvtoler) != 0) {
fprintf(stderr, "C++ implement pseudoinverse fail\n");
return -1;
}
print_matrix(pinv1);
fprintf(stderr, "\nopencv implement pseudoinverse:\n");
cv::Mat mat(rows, cols, CV_32FC1);
for (int y = 0; y < rows; ++y) {
for (int x = 0; x < cols; ++x) {
mat.at<float>(y, x) = vec.at(y).at(x);
}
}
cv::Mat pinv2;
cv::invert(mat, pinv2, cv::DECOMP_SVD);
print_matrix(pinv2);
return 0;
}
以下是采用Eigen实现的求矩阵伪逆code:
#include "funset.hpp"
#include <math.h>
#include <iostream>
#include <vector>
#include <string>
#include <opencv2/opencv.hpp>
#include <Eigen/Dense>
#include "common.hpp"
int test_pseudoinverse()
{
//std::vector<std::vector<float>> vec{ { 0.68f, 0.597f },
// { -0.211f, 0.823f },
// { 0.566f, -0.605f } };
//const int rows{ 3 }, cols{ 2 };
std::vector<std::vector<float>> vec{ { 0.68f, 0.597f, -0.211f },
{ 0.823f, 0.566f, -0.605f } };
const int rows{ 2 }, cols{ 3 };
std::vector<float> vec_;
for (int i = 0; i < rows; ++i) {
vec_.insert(vec_.begin() + i * cols, vec[i].begin(), vec[i].end());
}
Eigen::Map<Eigen::Matrix<float, Eigen::Dynamic, Eigen::Dynamic, Eigen::RowMajor>> m(vec_.data(), rows, cols);
fprintf(stderr, "source matrix:\n");
std::cout << m << std::endl;
fprintf(stderr, "\nEigen implement pseudoinverse:\n");
auto svd = m.jacobiSvd(Eigen::ComputeFullU | Eigen::ComputeFullV);
const auto &singularValues = svd.singularValues();
Eigen::Matrix<float, Eigen::Dynamic, Eigen::Dynamic> singularValuesInv(m.cols(), m.rows());
singularValuesInv.setZero();
double pinvtoler = 1.e-6; // choose your tolerance wisely
for (unsigned int i = 0; i < singularValues.size(); ++i) {
if (singularValues(i) > pinvtoler)
singularValuesInv(i, i) = 1.0f / singularValues(i);
else
singularValuesInv(i, i) = 0.f;
}
Eigen::MatrixXf pinvmat = svd.matrixV() * singularValuesInv * svd.matrixU().transpose();
std::cout << pinvmat << std::endl;
return 0;
}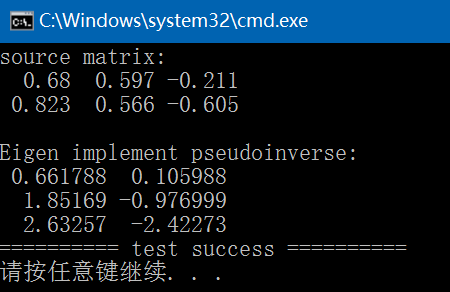
由以上结果可见:C++、OpenCV、Eigen实现结果是一致的。
GitHub:
https://github.com/fengbingchun/NN_Test
https://github.com/fengbingchun/Eigen_Test














 6664
6664











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









