










Arduino For ROS-002 — 第一个程序: Hello World
我的Ubuntu系统:Ubuntu 14.04.10 TLS 32位
Arduino的版本:Arduino 1.6.11 Linux 32位
Arduino 板子的型号:Arduino UNO R3
使用 的ROS版本:ROS Indigo
如果你还没有搭建ROS与Arduino之间的连接关系的话, 请参考 这篇博客:搭建 ROS 和 Arduino 相连接的开发环境 ,进行搭建。
一. 启动 Arduino IDE 软件
打开一个终端,执行下面的命令其中 Arduino IDE 软件
arduino
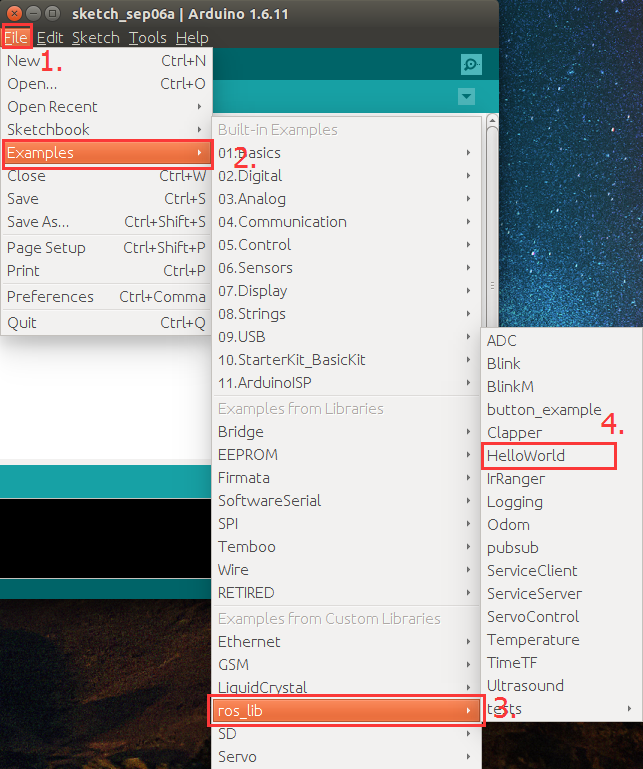
二. 打开 HelloWorld 示例程序
打开 HelloWorld 的示例程序。File -> Examples -> ros_lib -> HelloWorld
/*
* rosserial Publisher Example
* Prints "hello world!"
*/
#include <ros.h>
#include <std_msgs/String.h>
ros::NodeHandle nh;
std_msgs::String str_msg;
ros::Publisher chatter("chatter", &str_msg);
char hello[13] = "hello world!";
void setup()
{
nh.initNode();
nh.advertise(chatter);
}
void loop()
{
str_msg.data = hello;
chatter.publish( &str_msg );
nh.spinOnce();
delay(1000);
}三. 将程序烧写到 Arduino 板子上。
如果你不知道如何将 程序烧写到 Arduino 板子上,请参考这篇博客:Ubuntu/Linux 系统下,如何给Arduino板子烧写程序
四. 运行:
分别开3个终端,执行下面的程序:
1 . 启动 ros 主程序节点:
roscore2 . 启动 ros 串口监视节点:
rosrun rosserial_python serial_node.py /dev/ttyACM0 # 这个 /dev/ttyACM0 端口根据你的事情情况进行修改
# rosrun rosserial_python serial_node.py [端口名]
3 . 监听 /chatter 话题:
rostopic echo /chatter如果你看到下面的输出,说明:ROS 端成功的订阅了 Arduino 端发布的 名为 /chatter 的话题。

五. 代码讲解:
1 . 下面的头文件必须要有:
#include <ros.h>2 . 并定义一个 ROS Node Handle
ros::NodeHandle nh;3 . 在 1. 添加必要头文件后,同时添加你需要发布( 或订阅 ) 的话题中消息类型 头文件:
#include <std_msgs/String.h>4 . 同时定义相关 消息变量 :
std_msgs::String str_msg;5 . 定义 发布器 :
ros::Publisher chatter("chatter", &str_msg); //定义一个名为:"chatter" 的发布器,里面存放了一个 std_msgs::String 类型的消息变量。6 . 在 setup() 函数中初始化 ROS Node Handle,并给它添加你定义的发布器:
void setup()
{
nh.initNode();
nh.advertise(chatter); //添加上面定义的发布器
}7 . 在 loop() 函数中, 更新数据:
char hello[13] = "hello world!";
void loop()
{
str_msg.data = hello;
chatter.publish( &str_msg ); //发布消息
nh.spinOnce(); //必须写的函数,功能:更新缓存
delay(1000); //延伸1秒钟
}搞定
总结:
编写 Arduino 使用 ROS 库的编写的程序是可以总结出一个程序模板的,我们可以按照这个模板来编写其他 Arduino 使用 ROS 库 的程序。
所以,下一讲,我们来提前前总结一下:Arduino 使用 ROS 库 编写的程序的程序模板。简单的说就是:如何写Arduino For ROS的程序。
之后,再后面的博客中,我会以控制一些常用的电子模块为例,再介绍更多的Arduino For ROS 的程序。让 ROS 机器人操作系统变得更加实战性,更加被我们所凌驾。














 5113
5113











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









