







1.环境准备
Ubuntu16.04
ROS-kinetic
opencv3.3.1
video-stream-opencv
一个USB摄像头video-stream-opencv是USB摄像头驱动,关于它的介绍,请看github:https://github.com/ros-drivers/video_stream_opencv
安装video-stream-opencv
cd ~/catkin_ws/src/
git clone https://github.com/ros-drivers/video_stream_opencv.git
cd ~/catkin_ws/
catkin_make测试是否安装成功
在终端输入:
rosrun video_stream_opencv test_video_resource.py如果能从摄像头中看到影像说明安装成功。
2.opencv格式的图片与ROS中Image-message之间的相互转换
ROS image消息类型到opencv类型的转换:
cv_image = bridge.imgmsg_to_cv2(image_message, desired_encoding="passthrough")Opencv类型到ROS Image类型的转换:
image_message = cv2_to_imgmsg(cv_image, encoding="passthrough")3.目标
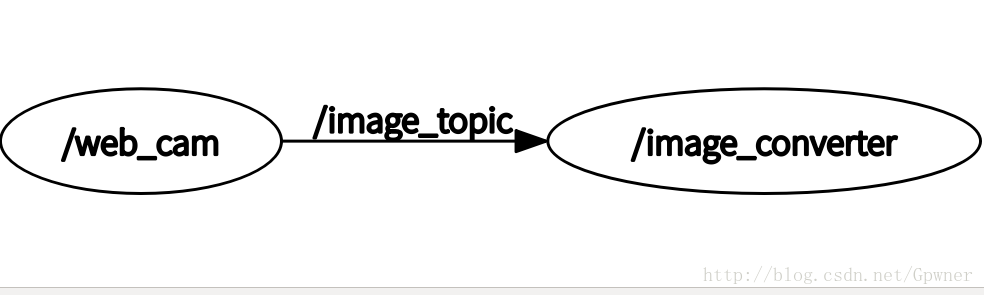
接下来要完成使用Opencv获取图片,通过ROS的publisher(web_cam)发布图片到image_topic主题下,然后有一个新的listener(image-converter)订阅这个topic,并在图片中的制定位置画出一个实心圆。
4.发布者
在video_stream_opencv这个package下有一个test_video_resource.py,这个文件的 原始作用只是简单的将OpenCv获取到的图片显示出来,这里我们要做的是通过这个node,将获取到的图片发布到image_topic下去,以下是我修改过的 test_video_resource.py:
#! /usr/bin/env python2
# -*- coding: utf-8 -*-
"""
Copyright (c) 2015 PAL Robotics SL.
Released under the BSD License.
Created on 7/14/15
@author: Sammy Pfeiffer
test_video_resource.py contains
a testing code to see if opencv can open a video stream
useful to debug if video_stream does not work
"""
import sys
import signal
import cv2
import rospy
from cv_bridge import CvBridge, CvBridgeError
from sensor_msgs.msg import Image
def quit(signum, frame):
print ''
print 'stop fusion'
sys.exit()
if __name__ == '__main__':
signal.signal(signal.SIGINT, quit)
signal.signal(signal.SIGTERM, quit)
# 参数的长度
if len(sys.argv) < 2:
print "You must give an argument to open a video stream."
print " It can be a number as video device, e.g.: 0 would be /dev/video0"
print " It can be a url of a stream, e.g.: rtsp://wowzaec2demo.streamlock.net/vod/mp4:BigBuckBunny_115k.mov"
print " It can be a video file, e.g.: myvideo.mkv"
exit(0)
resource = sys.argv[1]
# If we are given just a number, interpret it as a video device
if len(resource) < 3:
resource_name = "/dev/video" + resource
resource = int(resource)
else:
resource_name = resource
print "Trying to open resource: " + resource_name
cap = cv2.VideoCapture(resource)
if not cap.isOpened():
print "Error opening resource: " + str(resource)
print "Maybe opencv VideoCapture can't open it"
exit(0)
bridge = CvBridge()
publisher = rospy.Publisher('image_topic', Image, queue_size=10)
rospy.init_node('web_cam')
print "Correctly opened resource, starting to show feed."
rval, frame = cap.read()
while rval:
# 将opencv格式的图片转换为ROS可接受的msg
image_message = bridge.cv2_to_imgmsg(frame, encoding="bgr8")
try:
publisher.publish(image_message)
except CvBridgeError as e:
print(e)
rval, frame = cap.read()
以上代码不做过多解释,都比较简单。特别指出以下代码是为了坚挺键盘当用户输入Ctrl+c的时候节点终止
def quit(signum, frame):
print ''
print 'stop fusion'
sys.exit()
if __name__ == '__main__':
signal.signal(signal.SIGINT, quit)
signal.signal(signal.SIGTERM, quit)
...
while rval:
...5.订阅者
订阅者的作用就是上边说的从image-topic中订阅消息,然后将其转换为opencv格式的图片,然后在图片中画出一个实心圆,在与发布者相同的文件夹下创建一个web_cam_listener.py:
#!/usr/bin/env python
import roslib
roslib.load_manifest('video_stream_opencv')
import rospy
import cv2
from sensor_msgs.msg import Image
from cv_bridge import CvBridge, CvBridgeError
class image_converter:
def __init__(self):
self.bridge = CvBridge()
self.image_sub = rospy.Subscriber("image_topic", Image, self.callback)
def callback(self, data):
try:
cv_image = self.bridge.imgmsg_to_cv2(data, "bgr8")
except CvBridgeError as e:
print(e)
(rows, cols, channels) = cv_image.shape
if cols > 60 and rows > 60:
cv2.circle(cv_image, (150, 150), 20, (30, 144, 255), -1)
cv2.imshow("Image window", cv_image)
cv2.waitKey(3)
if __name__ == '__main__':
ic = image_converter()
rospy.init_node('image_converter')
try:
rospy.spin()
except KeyboardInterrupt:
print("Shutting down")
cv2.destroyAllWindows()
6.运行节点
- 启动第一个终端输入
roscore; - 启动(publisher)第二个终端输入
rosrun video_stream_opencv test_video_resource.py 0;
得到如下输出:
xzchuang@Vostro:~/catkin_ws$ rosrun video_stream_opencv test_video_resource.py 0Trying to open resource: /dev/video0
Correctly opened resource, starting to show feed.
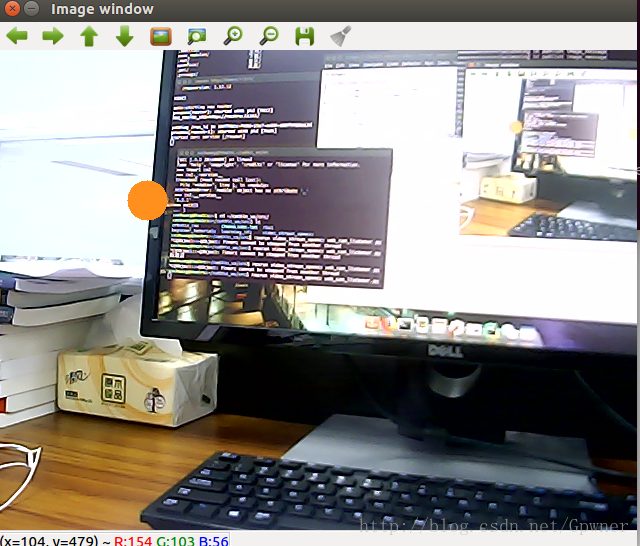
- 启动(Subscriber)启动第三个终端输入:
rosrun video_stream_opencv web_cam_listener.py这时候会在摄像头输入中画一个实心圆(橙色),然后显示出来,如图:
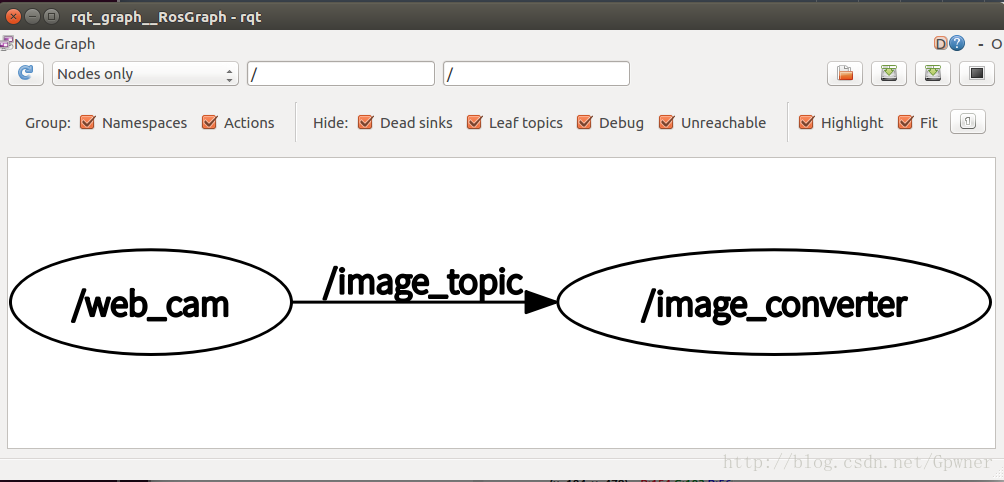
- 启动一个新的终端调用rqt-graph插件:
rosrun rqt_graph rqt_graph














 580
580











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









