









近期,因为要实现经过多个控制点的曲线拟合,研究起了曲线拟合算法。综合搜索到的资料,发现Bezier曲线拟合算法是一种相对较容易实现、且拟合的效果较好的算法。关于Bezier曲线原理,请参照(Bezier曲线原理),这里就不再做具体介绍了,我们使用的是Besier三次曲线拟合原理。下面主要介绍算法的实现过程。
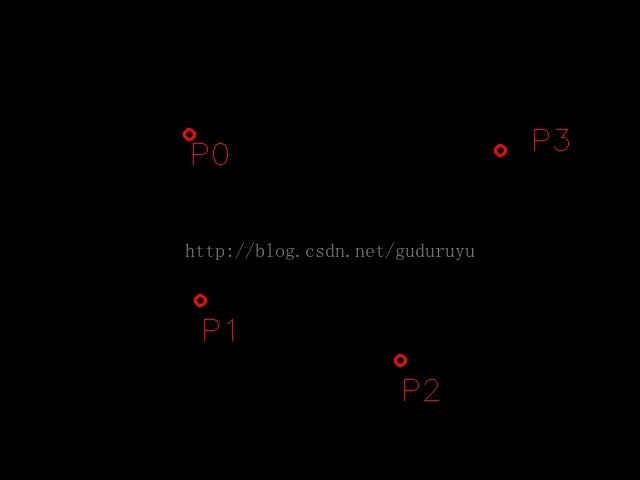
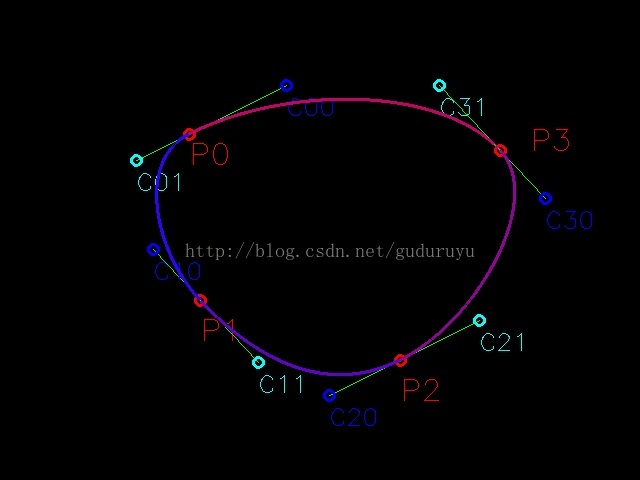
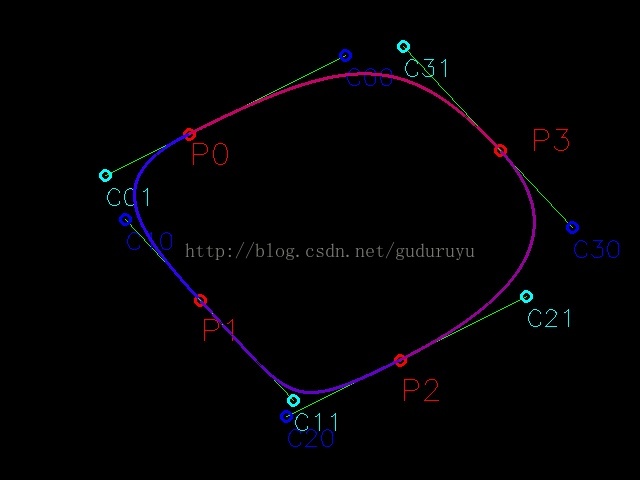
如下图中,P0、P1、P2、P3四个点,我们最终是想获取过这四个点的封闭平滑曲线。
根据Bezier三次曲线拟合的原理,我们可以分别拟合P0P1、P1P2、P2P3、P3P0四段曲线,进而连接成一个封闭的曲线。但是,Bezier三次曲线拟合需要在两点之间找到两个控制点。每个点的控制点可以根据其前后相邻的两点获得,具体实现如下:
void get_control_points(double x0, double y0, double x1, double y1, double x2, double y2,
double& p1x, double& p1y, double& p2x, double& p2y, double t)
{
double d01 = sqrt(pow(x1 - x0, 2) + pow(y1 - y0, 2));
double d12 = sqrt(pow(x2 - x1, 2) + pow(y2 - y1, 2));
double fa = t * d01 / (d01 + d12);
double fb = t * d12 / (d01 + d12);
p1x = x1 - fa * (x2 - x0);
p1y = y1 - fa * (y2 - y0);
p2x = x1 + fb * (x2 - x0);
p2y = y1 + fb * (y2 - y0);
return;
}其中,(x0,y0)、(x1,y1)、(x2,y2)分别为P0、P1、P2三点的坐标;t为曲率因子(取值范围0-1.0),影响的是拟合曲线的曲率,后面将对其作进一步介绍。根据三点的坐标和t,即可求得P1点的两个控制点C10(p1x,p1y)、C11(p2x,p2y)。
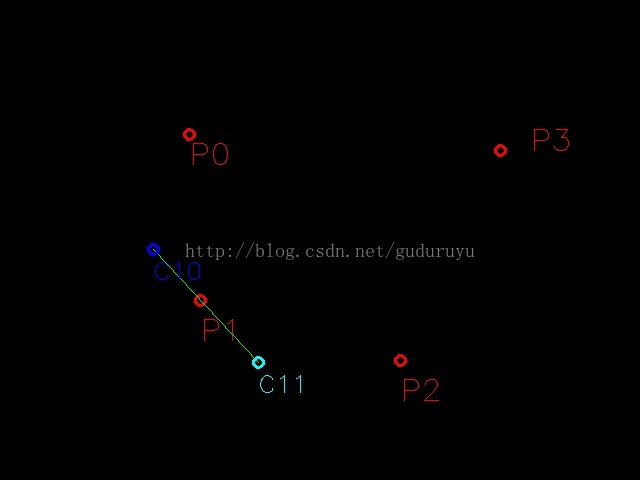
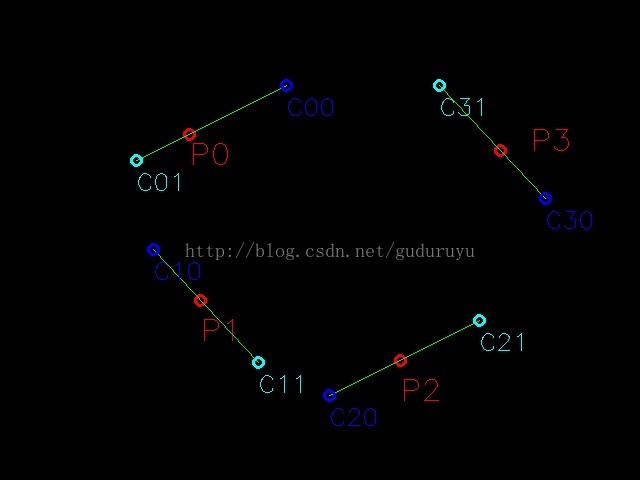
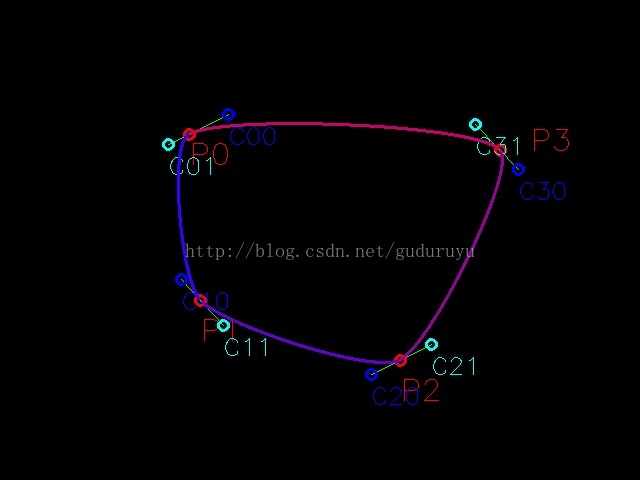
以此类推,我们可分别求得P2、P3、P0等各点的控制点,如下图所示。
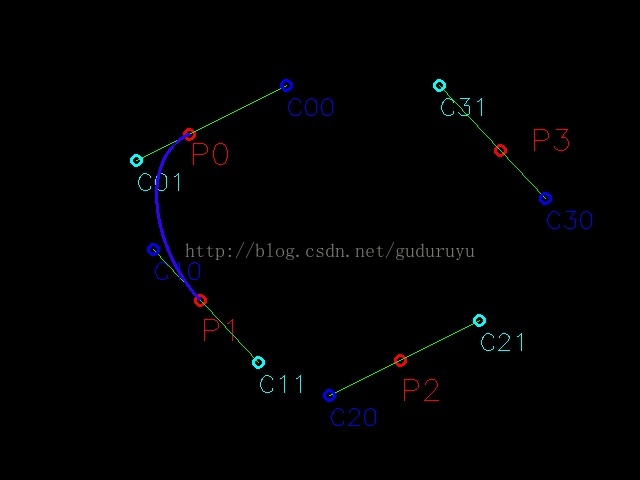
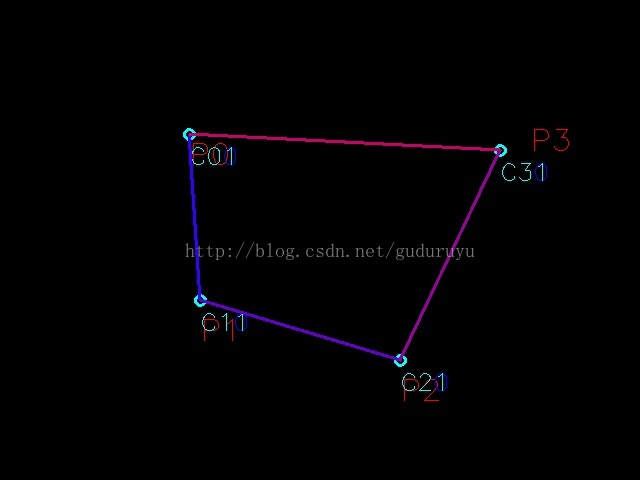
接下来,我们我们逐段绘制Besier曲线。通过两个顶点P0、P1和两个控制点C01、C10,根据Bezier曲线拟合原理,即可获得连接P0、P1两点的曲线。
void get_bezier(double x1, double y1, double x2, double y2, double p12x, double p12y,
double p21x, double p21y, std::vector<int>& vec_x, std::vector<int> & vec_y)
{
int prev_x = (int)round(x1);
int prev_y = (int)round(y1);
int last_x = (int)round(x2);
int last_y = (int)round(y2);
for (double s = 0.0; s < (1.0 + 0.00001); s += DELTA_S)
{
double J0 = pow(1 - s, 3);
double J1 = pow(1 - s, 2) * s * 3;
double J2 = pow(s, 2) * (1 - s) * 3;
double J3 = pow(s, 3);
double ptx = x1 * J0 + p12x * J1 + p21x * J2 + x2 * J3;
double pty = y1 * J0 + p12y * J1 + p21y * J2 + y2 * J3;
int iptx = (int)round(ptx);
int ipty = (int)round(pty);
vec_x.push_back(iptx);
vec_y.push_back(ipty);
}
return;
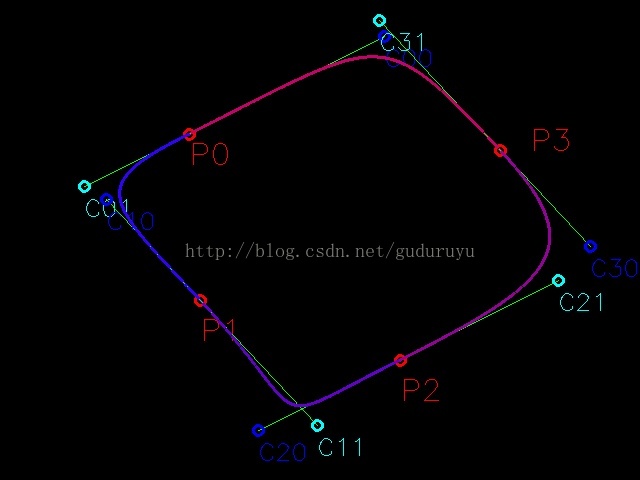
}其中,DELTA_S是拟合的步长。再通过轮廓查找算法和插值算法,即可得到一段完整的Besier曲线,如下图所示。
同样,以此类推,我们可以分别得到P1P2、P2P3、P3P0之间的曲线,将这几段曲线连接在一起,即可得到一条完整的封闭曲线。
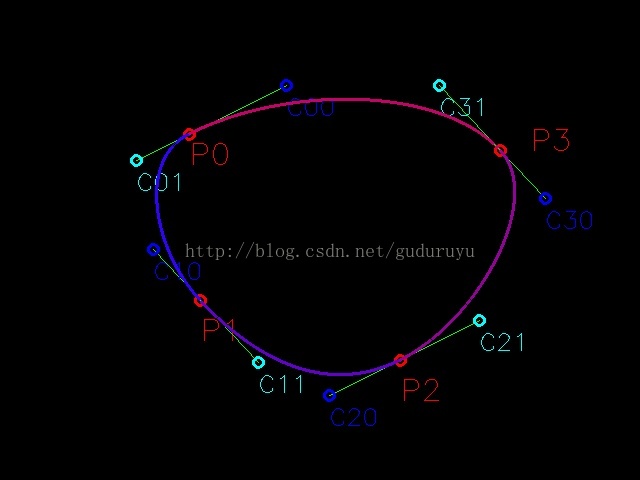
最后,我们再看一看前文提到的曲率因子t对拟合出来的曲线的影响。分别令 t = 0.0、0.2、0.5、0.8、1.0,得到的曲线分别如下图所示。
下面是基于OpenCV的完整实现代码:
#include "spline_curve.h"
#include <vector>
#define DELTA_S 0.01
#define T 0.5
void get_control_point(cv::Point2d& point0, cv::Point2d& point1, cv::Point2d& point2,
cv::Point2d& c01, cv::Point2d& c12, double t)
{
double d01 = sqrt(pow(point1.x - point0.x, 2) + pow(point1.y - point0.y, 2));
double d12 = sqrt(pow(point2.x - point1.x, 2) + pow(point2.y - point1.y, 2));
double fa = t * d01 / (d01 + d12);
double fb = t * d12 / (d01 + d12);
c01.x = point1.x - fa * (point2.x - point0.x);
c01.y = point1.y - fa * (point2.y - point0.y);
c12.x = point1.x + fb * (point2.x - point0.x);
c12.y = point1.y + fb * (point2.y - point0.y);
return;
}
void get_control_points_array(std::vector<cv::Point2d>& key_points, std::vector<cv::Point2d>& vec_c01,
std::vector<cv::Point2d>& vec_c02, double t)
{
int N = key_points.size();
for (int i = 0; i < N; i++)
{
cv::Point2d c01, c02;
if (i == 0)
{
get_control_point(key_points[N - 1], key_points[i], key_points[i + 1], c01, c02, t);
vec_c01.push_back(c01);
vec_c02.push_back(c02);
}
else if (i < (N - 1))
{
get_control_point(key_points[i - 1], key_points[i], key_points[i + 1], c01, c02, t);
vec_c01.push_back(c01);
vec_c02.push_back(c02);
}
else
{
get_control_point(key_points[i - 1], key_points[i], key_points[0], c01, c02, t);
vec_c01.push_back(c01);
vec_c02.push_back(c02);
}
}
}
bool is_adjcent_point(cv::Point2i& point1, cv::Point2i& point2)
{
if (((point1.x == point2.x) && (point1.y == point2.y)) ||
(std::abs(point1.x - point2.x) > 1) || (std::abs(point1.y - point2.y) > 1))
{
return false;
}
return true;
}
bool is_same_point(cv::Point2i& point1, cv::Point2i& point2)
{
if ((point1.x == point2.x) && (point1.y == point2.y))
{
return true;
}
return false;
}
// interpolation between not adjacent points
void get_line_points(cv::Point2i& point1, cv::Point2i& point2, std::vector<cv::Point2i>& line_points)
{
line_points.push_back(point1);
int dx = abs(point1.x - point2.x);
int dy = abs(point1.y - point2.y);
if (dx == 0 && dy == 0)
{
return;
}
if (dx > dy)
{
if (point1.x < point2.x)
{
for (int i = point1.x + 1; i < point2.x; i++)
{
int y = (int)(((point1.y - point2.y + 0.0) / (point1.x - point2.x)) * (i - point1.x) + point1.y);
line_points.push_back(cv::Point2i(i, y));
}
}
else
{
for (int i = point1.x - 1; i > point2.x; i--)
{
int y = (int)(((point1.y - point2.y + 0.0) / (point1.x - point2.x)) * (i - point1.x) + point1.y);
line_points.push_back(cv::Point2i(i, y));
}
}
}
else
{
if (point1.y < point2.y)
{
for (int i = point1.y + 1; i < point2.y; i++)
{
int x = (int)(((point1.x - point2.x + 0.0) / (point1.y - point2.y)) * (i - point1.y) + point1.x);
line_points.push_back(cv::Point2i(x, i));
}
}
else
{
for (int i = point1.y - 1; i > point2.y; i--)
{
int x = (int)(((point1.x - point2.x + 0.0) / (point1.y - point2.y)) * (i - point1.y) + point1.x);
line_points.push_back(cv::Point2i(x, i));
}
}
}
line_points.push_back(point2);
return;
}
bool get_spline(cv::Point2d& point1, cv::Point2d& point2, cv::Point2d& c01,
cv::Point2d& c12, std::vector<cv::Point2i>& spline_points, double delta_s)
{
cv::Point2i point_prev = (cv::Point2i)point1;
cv::Point2i point_last = (cv::Point2i)point2;
spline_points.push_back(point_prev);
for (double s = 0.0; s < (1.0 + 0.0001); s += delta_s)
{
double J0 = pow(1 - s, 3);
double J1 = pow(1 - s, 2) * s * 3;
double J2 = pow(s, 2) * (1 - s) * 3;
double J3 = pow(s, 3);
double ptx = point1.x * J0 + c01.x * J1 + c12.x * J2 + point2.x * J3;
double pty = point1.y * J0 + c01.y * J1 + c12.y * J2 + point2.y * J3;
cv::Point2i ipoint;
ipoint.x = (int)round(ptx);
ipoint.y = (int)round(pty);
if (is_same_point(ipoint, point_last))
{
get_line_points(point_prev, point_last, spline_points);
break;
}
if (is_adjcent_point(point_prev, ipoint))
{
spline_points.push_back(ipoint);
point_prev = ipoint;
}
else if (is_same_point(point_prev, ipoint))
{
continue;
}
else
{
get_line_points(point_prev, ipoint, spline_points);
point_prev = ipoint;
}
}
return true;
}
void smooth_curve(std::vector<cv::Point2i>& curve_in, std::vector<cv::Point2i>& curve_out, bool is_closed)
{
int vec_size = curve_in.size();
for (int i = 0; i < (vec_size - 2); i += 2)
{
if (i == 0 && is_closed)
{
if (is_adjcent_point(curve_in[vec_size - 1], curve_in[1]))
{
curve_out.push_back(curve_in[1]);
}
else
{
curve_out.push_back(curve_in[0]);
curve_out.push_back(curve_in[1]);
}
}
if (is_adjcent_point(curve_in[i], curve_in[i + 2]))
{
curve_out.push_back(curve_in[i + 2]);
}
else
{
curve_out.push_back(curve_in[i + 1]);
curve_out.push_back(curve_in[i + 2]);
}
}
return;
}
bool get_spline_curve(std::vector<cv::Point2d>& key_points, std::vector<cv::Point2i>& spline_curve, double t, bool is_closed)
{
if (key_points.size() < 2)
{
std::cout << "Key points is less than two!!!" << std::endl;
return false;
}
if (key_points.size() == 2)
{
cv::Point2i point1 = (cv::Point2i)key_points[0];
cv::Point2i point2 = (cv::Point2i)key_points[1];
get_line_points(point1, point2, spline_curve);
return true;
}
std::vector<cv::Point2d> vec_c01, vec_c12;
get_control_points_array(key_points, vec_c01, vec_c12, t);
std::vector<cv::Point2i> temp_spline;
for (int i = 0; i < key_points.size(); i++)
{
if (i < (key_points.size() - 1))
{
get_spline(key_points[i], key_points[i + 1], vec_c12[i], vec_c01[i + 1], temp_spline, DELTA_S);
continue;
}
if (is_closed)
{
get_spline(key_points[i], key_points[0], vec_c12[i], vec_c01[0], temp_spline, DELTA_S);
}
}
smooth_curve(temp_spline, spline_curve, is_closed);
return true;
}2017.03.09完成初稿














 3642
3642











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









