









在医学图像处理,尤其是在处理血管断层扫描类(如OCT、IVUS等)图像的过程中,不可避免的会使用到极坐标变换,也即是我们通常所说的“方转圆”。同样,我们可以使用极坐标变换的反变换实现“圆转方”
极坐标变换及其反变换的关键在于,根据极坐标变换前的图像(我们称为“方图”)确定极坐标变换后的图像(我们称为“圆图”)上每个像素点的像素值。也即是找到“圆图”和“方图”间几何坐标的对应关系。
1、极坐标变换(方转圆)
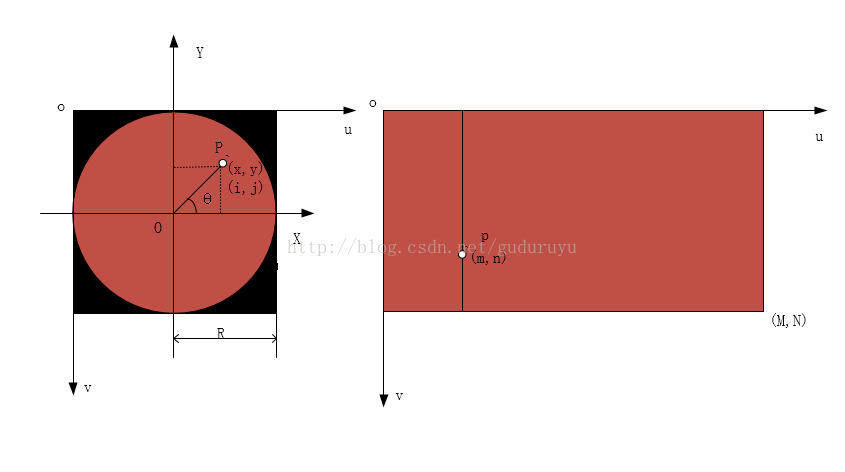
原理:如下图所示,实现极坐标变换的关键即在于找到圆图上任一点P(i,j),在方图上对应的点p(m,n),然后通过插值算法实现圆图上所有像素点的赋值。
方图上,其行列数分别为M、N,方图上的每一列对应为圆图上的每条半径,半径方向存在着一个长度缩放因子delta_r = M/R,圆周方向被分为N等分,即角度因子为delta_t = 2π/N;
圆图上,图像坐标(i,j)和世界坐标(x,y)有着如下变换关系:x = j - R, y = R - i;
那么,图中P点半径长度为r = sqrt(x*x + y*y),角度theta = arctan(y/x);
圆图上点P在方图上对应行数为r/delta_r;
圆图上点P在方图上对应的列数n = thata/delta_t。
以上就是极坐标变换的基本原理,结合相应的插值算法,即可实现图像的极坐标变换。
实现代码如下:
bool cartesian_to_polar(cv::Mat& mat_c, cv::Mat& mat_p, int img_d)
{
mat_p = cv::Mat::zeros(img_d, img_d, CV_8UC1);
int line_len = mat_c.rows;
int line_num = mat_c.cols;
double delta_r = (2.0*line_len) / (img_d - 1); //半径因子
double delta_t = 2.0 * PI / line_num; //角度因子
double center_x = (img_d - 1) / 2.0;
double center_y = (img_d - 1) / 2.0;
for (int i = 0; i < img_d; i++)
{
for (int j = 0; j < img_d; j++)
{
double rx = j - center_x; //图像坐标转世界坐标
double ry = center_y - i; //图像坐标转世界坐标
double r = std::sqrt(rx*rx + ry*ry);
if (r <= (img_d - 1) / 2.0)
{
double ri = r * delta_r;
int rf = (int)std::floor(ri);
int rc = (int)std::ceil(ri);
if (rf < 0)
{
rf = 0;
}
if (rc > (line_len - 1))
{
rc = line_len - 1;
}
double t = std::atan2(ry, rx);
if (t < 0)
{
t = t + 2.0 * PI;
}
double ti = t / delta_t;
int tf = (int)std::floor(ti);
int tc = (int)std::ceil(ti);
if (tf < 0)
{
tf = 0;
}
if (tc > (line_num - 1))
{
tc = line_num - 1;
}
mat_p.ptr<uchar>(i)[j] = interpolate_bilinear(mat_c, ri, rf, rc, ti, tf, tc);
}
}
}
return true;
}顺便给一段双线性插值的代码:
uchar interpolate_bilinear(cv::Mat& mat_src, double ri, int rf, int rc, double ti, int tf, int tc)
{
double inter_value = 0.0;
if (rf == rc && tc == tf)
{
inter_value = mat_src.ptr<uchar>(rc)[tc];
}
else if (rf == rc)
{
inter_value = (ti - tf) * mat_src.ptr<uchar>(rf)[tc] + (tc - ti) * mat_src.ptr<uchar>(rf)[tf];
}
else if (tf == tc)
{
inter_value = (ri - rf) * mat_src.ptr<uchar>(rc)[tf] + (rc - ri) * mat_src.ptr<uchar>(rf)[tf];
}
else
{
double inter_r1 = (ti - tf) * mat_src.ptr<uchar>(rf)[tc] + (tc - ti) * mat_src.ptr<uchar>(rf)[tf];
double inter_r2 = (ti - tf) * mat_src.ptr<uchar>(rc)[tc] + (tc - ti) * mat_src.ptr<uchar>(rc)[tf];
inter_value = (ri - rf) * inter_r2 + (rc - ri) * inter_r1;
}
return (uchar)inter_value;
}2、极坐标变换的反变换(圆转方)
原理:顾名思义,极坐标变换的反变换即极坐标变换的逆变换,原理和极坐标变换类似,只是更为直接和方便,且不需要进行插值,这里就不再赘述了。
直接看代码吧:
bool polar_to_cartesian(cv::Mat& mat_p, cv::Mat& mat_c, int rows_c, int cols_c)
{
mat_c = cv::Mat::zeros(rows_c, cols_c, CV_8UC1);
int polar_d = mat_p.cols;
double polar_r = polar_d / 2.0; // 圆图半径
double delta_r = polar_r / rows_c; //半径因子
double delta_t = 2.0*PI / cols_c; //角度因子
double center_polar_x = (polar_d - 1) / 2.0;
double center_polar_y = (polar_d - 1) / 2.0;
for (int i = 0; i < cols_c; i++)
{
double theta_p = i * delta_t; //方图第i列在圆图对应线的角度
double sin_theta = std::sin(theta_p);
double cos_theta = std::cos(theta_p);
for (int j = 0; j < rows_c; j++)
{
double temp_r = j * delta_r; //方图第j行在圆图上对应的半径长度
int polar_x = (int)(center_polar_x + temp_r * cos_theta);
int polar_y = (int)(center_polar_y - temp_r * sin_theta);
mat_c.ptr<uchar>(j)[i] = mat_p.ptr<uchar>(polar_y)[polar_x];
}
}
return true;
}
3、结果
为验证算法,下载了一张IVUS(血管超声)图像,先用极坐标反变换得到方图,再用极坐标变换将方图变换回圆图,通过比较,变换前后的图像基本一致,哦了~~~
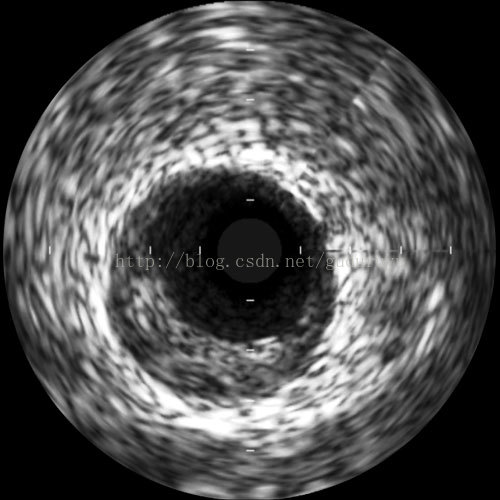
原始图
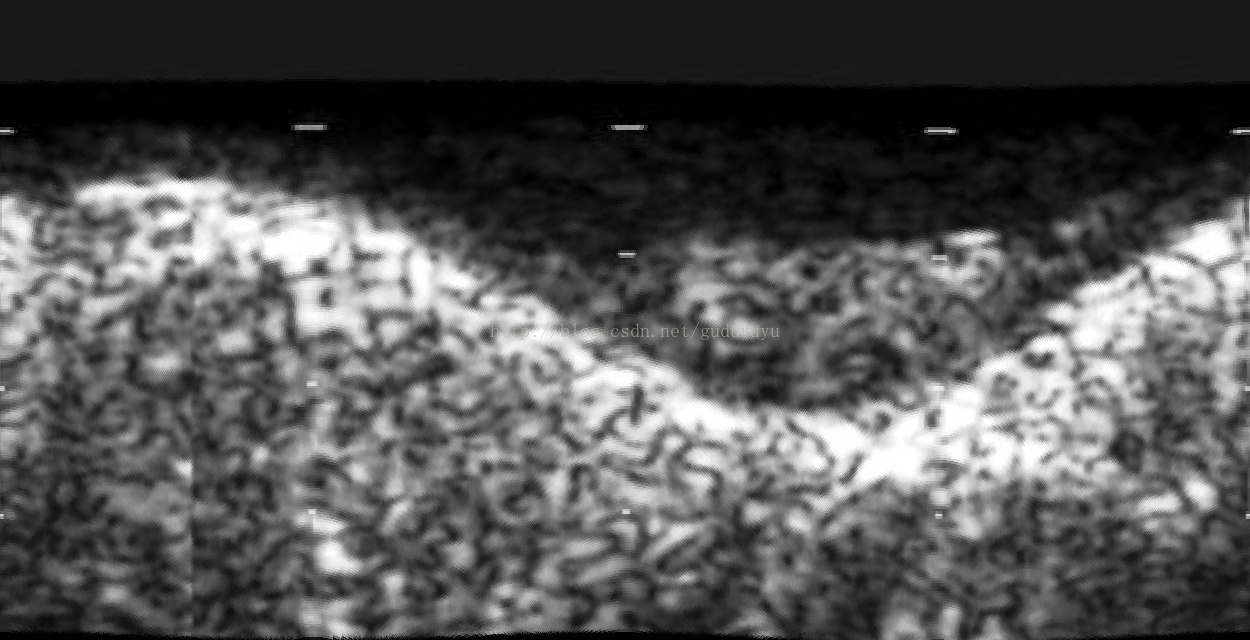
反极坐标变换图
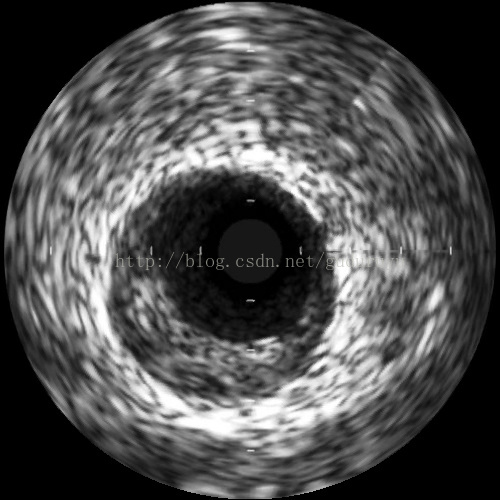
极坐标变换结果
2017.03.24完成初稿














 279
279











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









