







全向轮移动平台运动模型
使用全向轮(omni directional wheels)作为移动平台的轮子运动起来十分灵活,可以向360度任意方向移动。而全向轮又可分为45度麦克纳姆轮(见图1)和90度全向轮(见图2)。

图1 麦克纳姆轮

图2 90度全向轮
两者的运动分析是不同的,在此以90度全向轮为例进行分析。
全向轮移动平台理想运动学模型见图3:
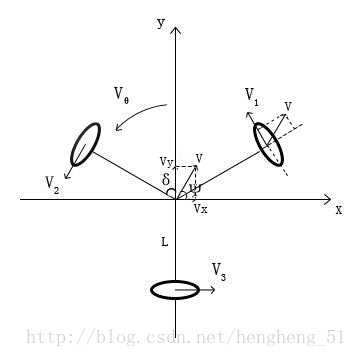
图3 运动模型
V1 V 1 , V2 V 2 , V3 V 3 为全向轮线速度, δ δ 为全向轮与y轴夹角,在此取60度。为移动平台自身的线速度, Vθ V θ 为平台绕几何中心的转速, L L 为全向轮中心到平台几何中心的距离。经分析可得出如下关系式:














 2519
2519











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









