








概述
之前的文章SURF和SIFT算子实现特征点检测和SURF算子实现特征点提取与匹配简单地讲了利用SIFT和SURF算子检测特征点,并且对特征点进行特征提取得到特征描述符(descriptors),在此基础上还可以进一步利用透视变换和空间映射找出已知物体(目标检测)。这里具体的实现是首先采用SURF/SIFT特征点检测与特征提取,然后采用FLANN匹配法保留好的匹配点,再利用findHomography找出相应的透视变换,最后采用perspectiveTransform函数映射点群,在场景中获取目标的位置。
实验所用环境是opencv2.4.0+vs2008+win7,需要注意opencv2.4.X版本中SurfFeatureDetector/SiftFeatureDetector是包含在opencv2/nonfree/features2d.hpp中,FlannBasedMatcher是包含在opencv2/features2d/features2d.hpp中。
SURF算子
首先使用SURF算子进行目标检测,代码如下:
/**
* @概述: 采用SURF算子在场景中进行已知目标检测
* @类和函数: SurfFeatureDetector + SurfDescriptorExtractor + FlannBasedMatcher + findHomography + perspectiveTransform
* @实现步骤:
* Step 1: 在图像中使用SURF算法SurfFeatureDetector检测关键点
* Step 2: 对检测到的每一个关键点使用SurfDescriptorExtractor计算其特征向量(也称描述子)
* Step 3: 使用FlannBasedMatcher通过特征向量对关键点进行匹配,使用阈值剔除不好的匹配
* Step 4: 利用findHomography基于匹配的关键点找出相应的透视变换
* Step 5: 利用perspectiveTransform函数映射点群,在场景中获取目标的位置
* @author: holybin
*/
#include <ctime>
#include <iostream>
#include "opencv2/core/core.hpp"
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/nonfree/features2d.hpp" //SurfFeatureDetector实际在该头文件中
#include "opencv2/features2d/features2d.hpp" //FlannBasedMatcher实际在该头文件中
#include "opencv2/calib3d/calib3d.hpp" //findHomography所需头文件
using namespace cv;
using namespace std;
int main( int argc, char** argv )
{
Mat imgObject = imread( "D:\\opencv_pic\\cat3d120.jpg", CV_LOAD_IMAGE_GRAYSCALE );
Mat imgScene = imread( "D:\\opencv_pic\\cat0.jpg", CV_LOAD_IMAGE_GRAYSCALE );
if( !imgObject.data || !imgScene.data )
{
cout<< " --(!) Error reading images "<<endl;
return -1;
}
double begin = clock();
///-- Step 1: 使用SURF算子检测特征点
int minHessian = 400;
SurfFeatureDetector detector( minHessian );
vector<KeyPoint> keypointsObject, keypointsScene;
detector.detect( imgObject, keypointsObject );
detector.detect( imgScene, keypointsScene );
cout<<"object--number of keypoints: "<<keypointsObject.size()<<endl;
cout<<"scene--number of keypoints: "<<keypointsScene.size()<<endl;
///-- Step 2: 使用SURF算子提取特征(计算特征向量)
SurfDescriptorExtractor extractor;
Mat descriptorsObject, descriptorsScene;
extractor.compute( imgObject, keypointsObject, descriptorsObject );
extractor.compute( imgScene, keypointsScene, descriptorsScene );
///-- Step 3: 使用FLANN法进行匹配
FlannBasedMatcher matcher;
vector< DMatch > allMatches;
matcher.match( descriptorsObject, descriptorsScene, allMatches );
cout<<"number of matches before filtering: "<<allMatches.size()<<endl;
//-- 计算关键点间的最大最小距离
double maxDist = 0;
double minDist = 100;
for( int i = 0; i < descriptorsObject.rows; i++ )
{
double dist = allMatches[i].distance;
if( dist < minDist )
minDist = dist;
if( dist > maxDist )
maxDist = dist;
}
printf(" max dist : %f \n", maxDist );
printf(" min dist : %f \n", minDist );
//-- 过滤匹配点,保留好的匹配点(这里采用的标准:distance<3*minDist)
vector< DMatch > goodMatches;
for( int i = 0; i < descriptorsObject.rows; i++ )
{
if( allMatches[i].distance < 2*minDist )
goodMatches.push_back( allMatches[i]);
}
cout<<"number of matches after filtering: "<<goodMatches.size()<<endl;
//-- 显示匹配结果
Mat resultImg;
drawMatches( imgObject, keypointsObject, imgScene, keypointsScene,
goodMatches, resultImg, Scalar::all(-1), Scalar::all(-1), vector<char>(),
DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS //不显示未匹配的点
);
//-- 输出匹配点的对应关系
for( int i = 0; i < goodMatches.size(); i++ )
printf( " good match %d: keypointsObject [%d] -- keypointsScene [%d]\n", i,
goodMatches[i].queryIdx, goodMatches[i].trainIdx );
///-- Step 4: 使用findHomography找出相应的透视变换
vector<Point2f> object;
vector<Point2f> scene;
for( size_t i = 0; i < goodMatches.size(); i++ )
{
//-- 从好的匹配中获取关键点: 匹配关系是关键点间具有的一 一对应关系,可以从匹配关系获得关键点的索引
//-- e.g. 这里的goodMatches[i].queryIdx和goodMatches[i].trainIdx是匹配中一对关键点的索引
object.push_back( keypointsObject[ goodMatches[i].queryIdx ].pt );
scene.push_back( keypointsScene[ goodMatches[i].trainIdx ].pt );
}
Mat H = findHomography( object, scene, CV_RANSAC );
///-- Step 5: 使用perspectiveTransform映射点群,在场景中获取目标位置
std::vector<Point2f> objCorners(4);
objCorners[0] = cvPoint(0,0);
objCorners[1] = cvPoint( imgObject.cols, 0 );
objCorners[2] = cvPoint( imgObject.cols, imgObject.rows );
objCorners[3] = cvPoint( 0, imgObject.rows );
std::vector<Point2f> sceneCorners(4);
perspectiveTransform( objCorners, sceneCorners, H);
//-- 在被检测到的目标四个角之间划线
line( resultImg, sceneCorners[0] + Point2f( imgObject.cols, 0), sceneCorners[1] + Point2f( imgObject.cols, 0), Scalar(0, 255, 0), 4 );
line( resultImg, sceneCorners[1] + Point2f( imgObject.cols, 0), sceneCorners[2] + Point2f( imgObject.cols, 0), Scalar( 0, 255, 0), 4 );
line( resultImg, sceneCorners[2] + Point2f( imgObject.cols, 0), sceneCorners[3] + Point2f( imgObject.cols, 0), Scalar( 0, 255, 0), 4 );
line( resultImg, sceneCorners[3] + Point2f( imgObject.cols, 0), sceneCorners[0] + Point2f( imgObject.cols, 0), Scalar( 0, 255, 0), 4 );
//-- 显示检测结果
imshow("detection result", resultImg );
double end = clock();
cout<<"\nSURF--elapsed time: "<<(end - begin)/CLOCKS_PER_SEC*1000<<" ms\n";
waitKey(0);
return 0;
}
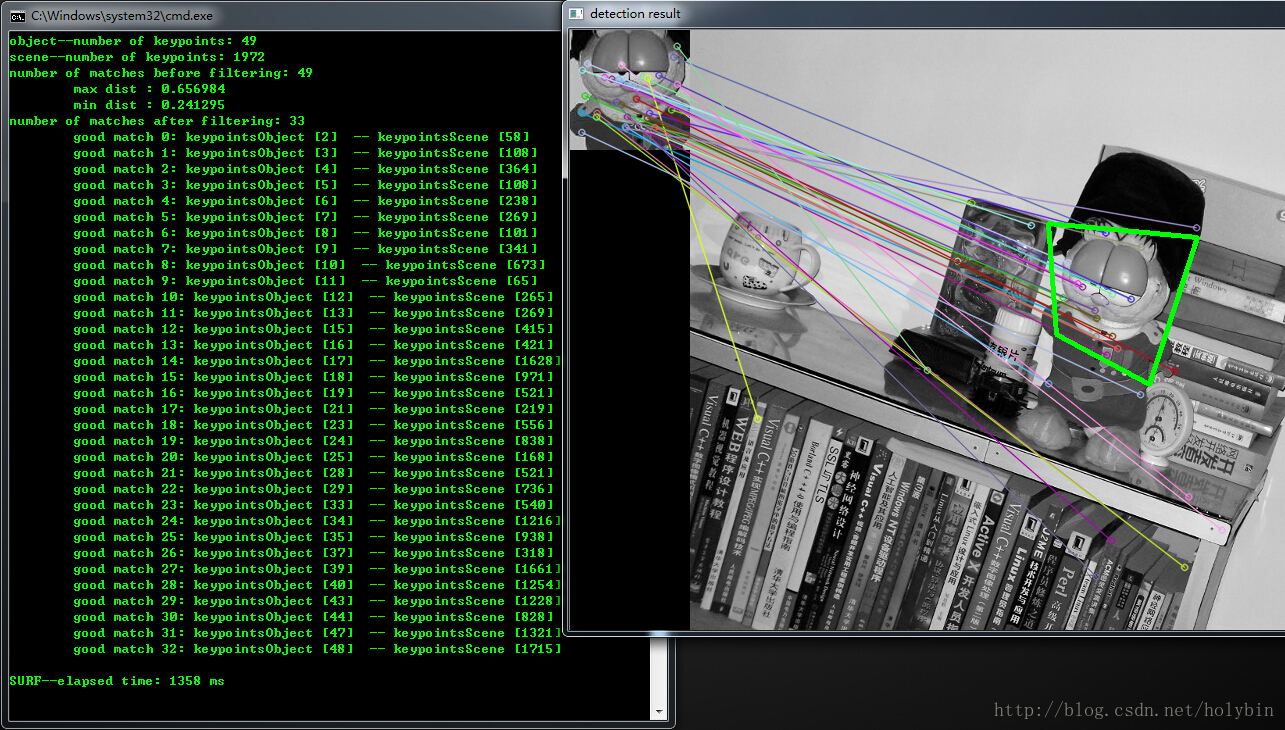
实验结果:
SIFT算子
作为对比,再使用SIFT算子进行目标检测,只需要将SurfFeatureDetector换成SiftFeatureDetector,将SurfDescriptorExtractor换成SiftDescriptorExtractor即可。代码如下:
/**
* @概述: 采用SIFT算子在场景中进行已知目标检测
* @类和函数: SiftFeatureDetector + SiftDescriptorExtractor + FlannBasedMatcher + findHomography + perspectiveTransform
* @实现步骤:
* Step 1: 在图像中使用SIFT算法SiftFeatureDetector检测关键点
* Step 2: 对检测到的每一个关键点使用SiftDescriptorExtractor计算其特征向量(也称描述子)
* Step 3: 使用FlannBasedMatcher通过特征向量对关键点进行匹配,使用阈值剔除不好的匹配
* Step 4: 利用findHomography基于匹配的关键点找出相应的透视变换
* Step 5: 利用perspectiveTransform函数映射点群,在场景中获取目标的位置
* @author: holybin
*/
#include <ctime>
#include <iostream>
#include "opencv2/core/core.hpp"
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/nonfree/features2d.hpp" //SiftFeatureDetector实际在该头文件中
#include "opencv2/features2d/features2d.hpp" //FlannBasedMatcher实际在该头文件中
#include "opencv2/calib3d/calib3d.hpp" //findHomography所需头文件
using namespace cv;
using namespace std;
int main( int argc, char** argv )
{
Mat imgObject = imread( "D:\\opencv_pic\\cat3d120.jpg", CV_LOAD_IMAGE_GRAYSCALE );
Mat imgScene = imread( "D:\\opencv_pic\\cat0.jpg", CV_LOAD_IMAGE_GRAYSCALE );
if( !imgObject.data || !imgScene.data )
{
cout<< " --(!) Error reading images "<<endl;
return -1;
}
double begin = clock();
///-- Step 1: 使用SIFT算子检测特征点
//int minHessian = 400;
SiftFeatureDetector detector;//( minHessian );
vector<KeyPoint> keypointsObject, keypointsScene;
detector.detect( imgObject, keypointsObject );
detector.detect( imgScene, keypointsScene );
cout<<"object--number of keypoints: "<<keypointsObject.size()<<endl;
cout<<"scene--number of keypoints: "<<keypointsScene.size()<<endl;
///-- Step 2: 使用SIFT算子提取特征(计算特征向量)
SiftDescriptorExtractor extractor;
Mat descriptorsObject, descriptorsScene;
extractor.compute( imgObject, keypointsObject, descriptorsObject );
extractor.compute( imgScene, keypointsScene, descriptorsScene );
///-- Step 3: 使用FLANN法进行匹配
FlannBasedMatcher matcher;
vector< DMatch > allMatches;
matcher.match( descriptorsObject, descriptorsScene, allMatches );
cout<<"number of matches before filtering: "<<allMatches.size()<<endl;
//-- 计算关键点间的最大最小距离
double maxDist = 0;
double minDist = 100;
for( int i = 0; i < descriptorsObject.rows; i++ )
{
double dist = allMatches[i].distance;
if( dist < minDist )
minDist = dist;
if( dist > maxDist )
maxDist = dist;
}
printf(" max dist : %f \n", maxDist );
printf(" min dist : %f \n", minDist );
//-- 过滤匹配点,保留好的匹配点(这里采用的标准:distance<3*minDist)
vector< DMatch > goodMatches;
for( int i = 0; i < descriptorsObject.rows; i++ )
{
if( allMatches[i].distance < 2*minDist )
goodMatches.push_back( allMatches[i]);
}
cout<<"number of matches after filtering: "<<goodMatches.size()<<endl;
//-- 显示匹配结果
Mat resultImg;
drawMatches( imgObject, keypointsObject, imgScene, keypointsScene,
goodMatches, resultImg, Scalar::all(-1), Scalar::all(-1), vector<char>(),
DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS //不显示未匹配的点
);
//-- 输出匹配点的对应关系
for( int i = 0; i < goodMatches.size(); i++ )
printf( " good match %d: keypointsObject [%d] -- keypointsScene [%d]\n", i,
goodMatches[i].queryIdx, goodMatches[i].trainIdx );
///-- Step 4: 使用findHomography找出相应的透视变换
vector<Point2f> object;
vector<Point2f> scene;
for( size_t i = 0; i < goodMatches.size(); i++ )
{
//-- 从好的匹配中获取关键点: 匹配关系是关键点间具有的一 一对应关系,可以从匹配关系获得关键点的索引
//-- e.g. 这里的goodMatches[i].queryIdx和goodMatches[i].trainIdx是匹配中一对关键点的索引
object.push_back( keypointsObject[ goodMatches[i].queryIdx ].pt );
scene.push_back( keypointsScene[ goodMatches[i].trainIdx ].pt );
}
Mat H = findHomography( object, scene, CV_RANSAC );
///-- Step 5: 使用perspectiveTransform映射点群,在场景中获取目标位置
std::vector<Point2f> objCorners(4);
objCorners[0] = cvPoint(0,0);
objCorners[1] = cvPoint( imgObject.cols, 0 );
objCorners[2] = cvPoint( imgObject.cols, imgObject.rows );
objCorners[3] = cvPoint( 0, imgObject.rows );
std::vector<Point2f> sceneCorners(4);
perspectiveTransform( objCorners, sceneCorners, H);
//-- 在被检测到的目标四个角之间划线
line( resultImg, sceneCorners[0] + Point2f( imgObject.cols, 0), sceneCorners[1] + Point2f( imgObject.cols, 0), Scalar(0, 255, 0), 4 );
line( resultImg, sceneCorners[1] + Point2f( imgObject.cols, 0), sceneCorners[2] + Point2f( imgObject.cols, 0), Scalar( 0, 255, 0), 4 );
line( resultImg, sceneCorners[2] + Point2f( imgObject.cols, 0), sceneCorners[3] + Point2f( imgObject.cols, 0), Scalar( 0, 255, 0), 4 );
line( resultImg, sceneCorners[3] + Point2f( imgObject.cols, 0), sceneCorners[0] + Point2f( imgObject.cols, 0), Scalar( 0, 255, 0), 4 );
//-- 显示检测结果
imshow("detection result", resultImg );
double end = clock();
cout<<"\nSIFT--elapsed time: "<<(end - begin)/CLOCKS_PER_SEC*1000<<" ms\n";
waitKey(0);
return 0;
}
实验结果:
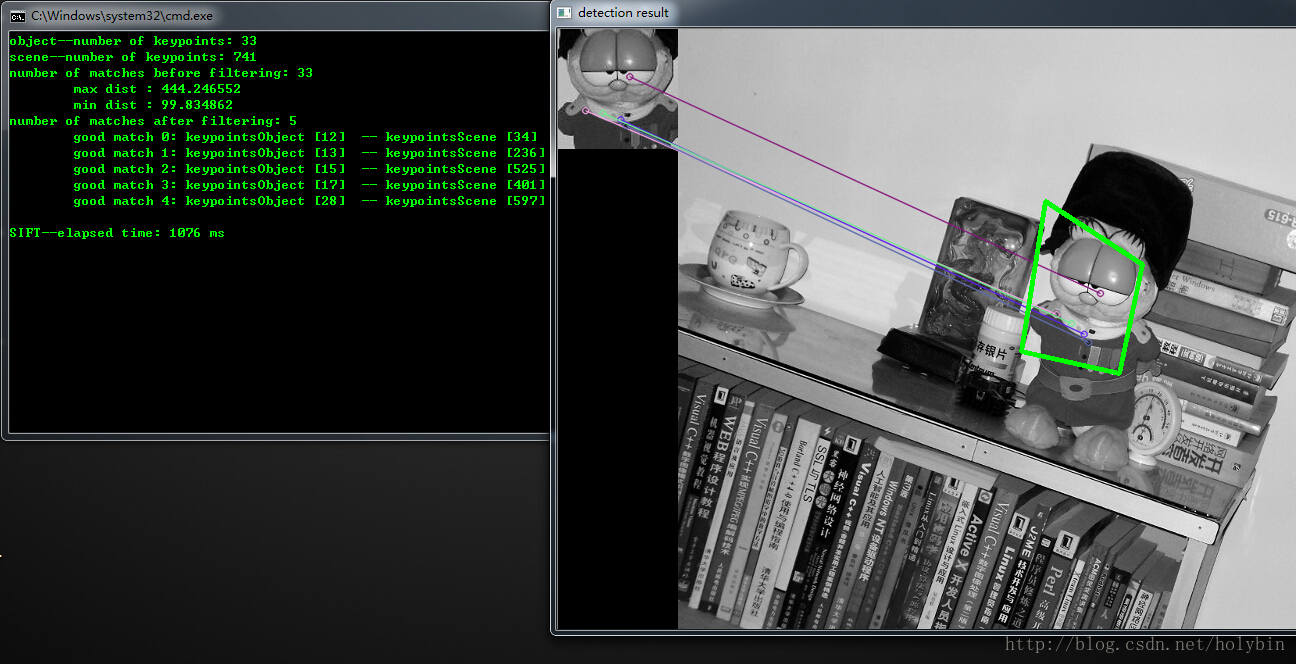
可以看出,SURF的速度比SIFT慢了,主要是由于匹配点较多计算复杂度高造成的,但是匹配点个数比SIFT多,所以准确度比SIFT高。














 898
898











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









