







PCL 环境搭建与例程
vs版本:vs 2010
windows版本:windows 7 64位
pcl版本:1.6
PCL(Point Cloud Library)是在吸收了前人点云相关研究基础上建立起来的大型跨平台开源C++编程库,它实现了大量点云相关的通用算法和高效数据结构,涉及到点云获取、滤波、分割、配准、检索、特征提取、识别、追踪、曲面重建、可视化等。支持多种操作系统平台,可在Windows、Linux、Android、Mac OS X、部分嵌入式实时系统上运行。如果说OpenCV是2D信息获取与处理的结晶,那么PCL就在3D信息获取与处理上具有同等地位,PCL是BSD授权方式,可以免费进行商业和学术应用。 —-摘自PCL中文官网
1. 版本选择和安装
下载页面 http://pointclouds.org/downloads/
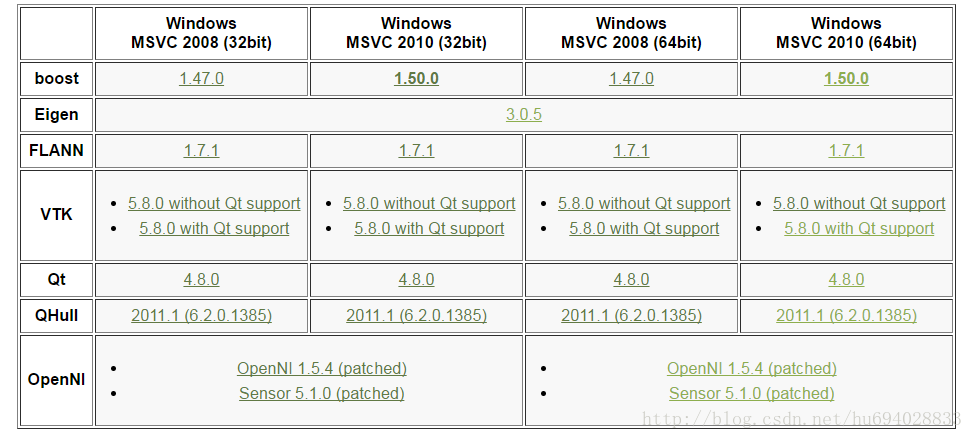
我选择的是Window版本的,windows可以选择all-in-one版本或者选择自己下载依赖,总共有boost,Eigen等库,个人建议使用all-in-one版本,这样方便管理和引入,独立下载依赖的话安装完后比较分散。我的系统是64位的windows7,但下载64位的版本安装后,无法链接lib,应该就是头文件和lib的版本不对,重新下载了32位的版本才调试成功。在已经设置了lib后,如果还无法链接,考虑头文件是否与lib匹配,可能同一个头文件在vs的引入目录中有多个目录存在,或者是lib 的版本不对,刚开始在这里浪费了很多时间。
安装过程可以选择是否加入环境变量,默认其它的依赖会安装到pcl所在的目录。

2. 配置使用
包含目录
vs 2010 的包含目录,D:\Program Files是我的安装目录,因为之前安装了64位的,所以装在了这个文件夹。
D:\Program Files\PCL 1.6.0\include\pcl-1.6
D:\Program Files\PCL 1.6.0\3rdParty\VTK\include\vtk-5.8
D:\Program Files\PCL 1.6.0\3rdParty\Qhull\include
D:\Program Files\PCL 1.6.0\3rdParty\OpenNI
D:\Program Files\PCL 1.6.0 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 751
751











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









