







背景
分类问题中,在一个线性不可分的样本上,通常需要用到一些Non-linear的特征,把低维度空间上的样本投影到高维度上,从而使得这些样本在高维度线性可分。但是这个投影的过程通常也会有以下两个问题:
- 如果在原样本中加了太多的高次多项式的特征,首先会导致过拟合,模型的泛化能力会很差;
- 多项式组合会有指数级别的组合方式,这使得在投影后的样本空间中维度非常高,这也会消耗太多的计算资源和空间资源
为了解决上面两个问题,于是诞生了SVM,SVM有如下两个优势:
- 首先SVM是基于结构风险最小化原理,即它的VC维很小(相比于它的维度),不容易导致过拟合;(VC维是衡量模型复杂度的一个指标,VC维越大说明hypothesis空间越大,越不容易得到一个理想的模型,它和train error一起决定了泛化误差的上限)。
- 其次,利用SVM的优化过程,可以利用kernel trick,把在高纬度空间中的计算放到低纬度空间来进行,因此可以把SVM的特征投影到高纬度甚至无穷维,并且消耗很小的计算和存储资源。
接下来来介绍SVM是怎么工作的,以及它为什么有上面两个优势。本节主要介绍最佳分割平面及其求解过程以及为什么它是最佳的。
最佳分割超平面
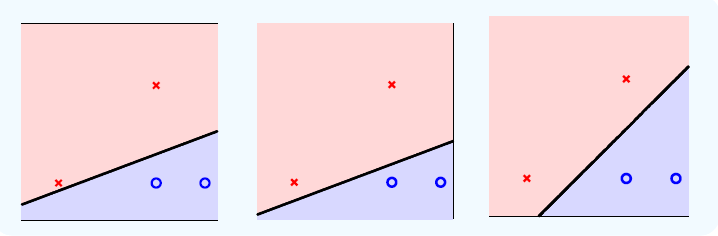
现在假设有两类线性可分的样本,一类圈圈,一类叉叉。分类问题就是要找一个超平面,将这两类分开,但是能分割开这两类的超平面有很多,如下面的图所示。感知机算法就是随机的找到一个能够分开的超平面,它并不关心这个超平面如何。下面三个图中,直觉上感觉,第三个超平面是最理想的。
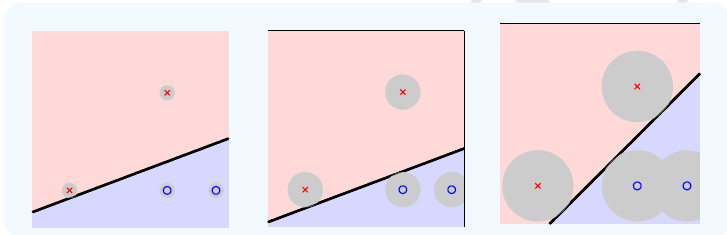
那么为什么第三个超平面是最理想的呢?原因是测试集上的样本是我们观测得到的数据,而观测到的数据和它真实分布是有一定的误差的,下面三个图中灰色的圆圈表示了每个平面能够容忍误差的大小,当误差超过这个圆圈的范围,分割面就要犯错误了,所以第三个图的容忍误差的能力是最强的。这是从直观上的一个解释,下面推导SVM的过程中会解释为什么这个是最佳的分割面。
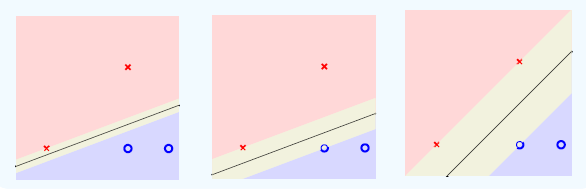
这样,能容忍误差的能力最大的那个超平面是我们要的,定义margin为,由分割平面开始往两边推,到碰到样本点时候的距离。如下面的图所示,黄色部分即为margin。
最佳分割平面求解
符号定义如下,其中 x 和
x=⎡⎣⎢⎢⎢⎢x1x2...xd⎤⎦⎥⎥⎥⎥;w=⎡⎣⎢⎢⎢⎢w1w2...xd⎤⎦⎥⎥⎥⎥;b=bias;h(x)=sign(wTx+b)
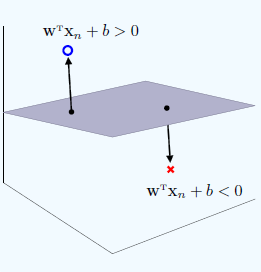
如果一个超平面可以完全把正负类样本分开,那么分布在超平面两侧的样本点表示成下图中的形式,那么所有样本可以用公式归纳成
yn(wTxn+b)>0,n=1,2...N
.
假设 ρ=minn=0,1...Nyn(wTxn+b) , 如果能够完全分开,则 ρ>0 。然而在 wTx+b=0 这个超平面上,对 w 做一下scaling,即乘以或除以一个大于零的数,这个平面是不会变的。那么如果上式中对
ρ/ρ=minn=1...Nyn(wTxn+b)/ρ=1
因此, yn(wTxn+b)>0,n=1,2...N 和 minn=0,1...Nyn(wT
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 6262
6262











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









