







1、算法:
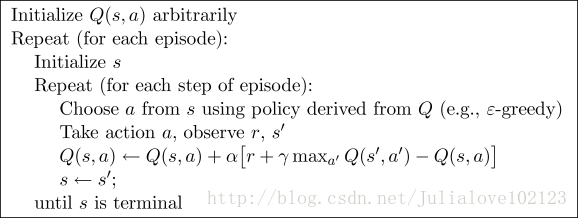
整个算法就是一直不断更新 Q table 里的值, 然后再根据新的值来判断要在某个 state 采取怎样的 action. Qlearning 是一个 off-policy 的算法, 因为里面的 max action 让 Q table 的更新可以不基于正在经历的经验(可以是现在学习着很久以前的经验,甚至是学习他人的经验). 不过这一次的例子, 我们没有运用到 off-policy, 而是把 Qlearning 用在了 on-policy 上, 也就是现学现卖, 将现在经历的直接当场学习并运用. On-policy 和 off-policy 的差别我们会在之后的 Deep Q network (off-policy) 学习中见识到. 而之后的教程也会讲到一个 on-policy (Sarsa) 的形式, 我们之后再对比.
2、代码实现:
maze_env :环境模块, maze_env 模块我们可以不深入研究, 可以去看看如何使用 python 自带的简单 GUI 模块 tkinter 来编写虚拟环境.
RL_brain: 这个模块是 Reinforment Learning 的大脑部分。
from maze_env import Maze
from RL_brain import QLearningTable`算法主要部分:
def update():
# 学习 100 回合
for episode in range(100):
# 初始化 state 的观测值
observation = env.reset()
while True:
# 更新可视化环境
env.render()
# RL 大脑根据 state 的观测值挑选 action
action = RL.choose_action(str(observation))
# 探索者在环境中实施这个 action, 并得到环境返回的下一个 state 观测值, reward 和 done (是否是掉下地狱或者升上天堂)
observation_, reward, done = env.step(action)
# RL 从这个序列 (state, action, reward, state_) 中学习
RL.learn(str(observation), action, reward, str(observation_))
# 将下一个 state 的值传到下一次循环
observation = observation_
# 如果掉下地狱或者升上天堂, 这回合就结束了
if done:
break
# 结束游戏并关闭窗口
print('game over')
env.destroy()
if __name__ == "__main__":
# 定义环境 env 和 RL 方式
env = Maze()
RL = QLearningTable(actions=list(range(env.n_actions)))
# 开始可视化环境 env
env.after(100, update)
env.mainloop()
3、QLearningTable:
3.1、主结构
class QLearningTable:
# 初始化
def __init__(self, actions, learning_rate=0.01, reward_decay=0.9, e_greedy=0.9):
# 选行为
def choose_action(self, observation):
# 学习更新参数
def learn(self, s, a, r, s_):
# 检测 state 是否存在
def check_state_exist(self, state):3.2、预设值:
import numpy as np
import pandas as pd
class QLearningTable:
def __init__(self, actions, learning_rate=0.01, reward_decay=0.9, e_greedy=0.9):
self.actions = actions # a list
self.lr = learning_rate # 学习率
self.gamma = reward_decay # 奖励衰减
self.epsilon = e_greedy # 贪婪度
self.q_table = pd.DataFrame(columns=self.actions) # 初始 q_table3.3、决定行为:
这里是定义如何根据所在的 state, 或者是在这个 state 上的 观测值 (observation) 来决策.
def choose_action(self, observation):
self.check_state_exist(observation) # 检测本 state 是否在 q_table 中存在(见后面标题内容)
# 选择 action
if np.random.uniform() < self.epsilon: # 选择 Q value 最高的 action
state_action = self.q_table.ix[observation, :]
# 同一个 state, 可能会有多个相同的 Q action value, 所以我们乱序一下
state_action = state_action.reindex(np.random.permutation(state_action.index))
action = state_action.argmax()
else: # 随机选择 action
action = np.random.choice(self.actions)
return action3.4、学习:
根据是否是 terminal state (回合终止符) 来判断应该如何更行 q_table. 更新的方式是不是很熟悉呢:
update = self.lr * (q_target - q_predict)
这可以理解成神经网络中的更新方式, 学习率 * (真实值 - 预测值). 将判断误差传递回去, 有着和神经网络更新的异曲同工之处.
def learn(self, s, a, r, s_):
self.check_state_exist(s_) # 检测 q_table 中是否存在 s_ (见后面标题内容)
q_predict = self.q_table.ix[s, a]
if s_ != 'terminal':
q_target = r + self.gamma * self.q_table.ix[s_, :].max() # 下个 state 不是 终止符
else:
q_target = r # 下个 state 是终止符
self.q_table.ix[s, a] += self.lr * (q_target - q_predict) # 更新对应的 state-action 值3.5、检测state是否存在:
这个功能就是检测 q_table 中有没有当前 state 的步骤了, 如果还没有当前 state, 那我我们就插入一组全 0 数据, 当做这个 state 的所有 action 初始 values.
def check_state_exist(self, state):
if state not in self.q_table.index:
# append new state to q table
self.q_table = self.q_table.append(
pd.Series(
[0]*len(self.actions),
index=self.q_table.columns,
name=state,
)
)
4、附加环境env:
"""
import numpy as np
np.random.seed(1)
import tkinter as tk
import time
UNIT = 40 # pixels
MAZE_H = 4 # grid height
MAZE_W = 4 # grid width
class Maze(tk.Tk, object):
def __init__(self):
super(Maze, self).__init__()
self.action_space = ['u', 'd', 'l', 'r']
self.n_actions = len(self.action_space)
self.title('maze')
self.geometry('{0}x{1}'.format(MAZE_H * UNIT, MAZE_H * UNIT))
self._build_maze()
def _build_maze(self):
self.canvas = tk.Canvas(self, bg='white',
height=MAZE_H * UNIT,
width=MAZE_W * UNIT)
# create grids
for c in range(0, MAZE_W * UNIT, UNIT):
x0, y0, x1, y1 = c, 0, c, MAZE_H * UNIT
self.canvas.create_line(x0, y0, x1, y1)
for r in range(0, MAZE_H * UNIT, UNIT):
x0, y0, x1, y1 = 0, r, MAZE_H * UNIT, r
self.canvas.create_line(x0, y0, x1, y1)
# create origin
origin = np.array([20, 20])
# hell
hell1_center = origin + np.array([UNIT * 2, UNIT])
self.hell1 = self.canvas.create_rectangle(
hell1_center[0] - 15, hell1_center[1] - 15,
hell1_center[0] + 15, hell1_center[1] + 15,
fill='black')
# hell
hell2_center = origin + np.array([UNIT, UNIT * 2])
self.hell2 = self.canvas.create_rectangle(
hell2_center[0] - 15, hell2_center[1] - 15,
hell2_center[0] + 15, hell2_center[1] + 15,
fill='black')
# create oval
oval_center = origin + UNIT * 2
self.oval = self.canvas.create_oval(
oval_center[0] - 15, oval_center[1] - 15,
oval_center[0] + 15, oval_center[1] + 15,
fill='yellow')
# create red rect
self.rect = self.canvas.create_rectangle(
origin[0] - 15, origin[1] - 15,
origin[0] + 15, origin[1] + 15,
fill='red')
# pack all
self.canvas.pack()
def reset(self):
self.update()
time.sleep(0.5)
self.canvas.delete(self.rect)
origin = np.array([20, 20])
self.rect = self.canvas.create_rectangle(
origin[0] - 15, origin[1] - 15,
origin[0] + 15, origin[1] + 15,
fill='red')
# return observation
return self.canvas.coords(self.rect)
def step(self, action):
s = self.canvas.coords(self.rect)
base_action = np.array([0, 0])
if action == 0: # up
if s[1] > UNIT:
base_action[1] -= UNIT
elif action == 1: # down
if s[1] < (MAZE_H - 1) * UNIT:
base_action[1] += UNIT
elif action == 2: # right
if s[0] < (MAZE_W - 1) * UNIT:
base_action[0] += UNIT
elif action == 3: # left
if s[0] > UNIT:
base_action[0] -= UNIT
self.canvas.move(self.rect, base_action[0], base_action[1]) # move agent
s_ = self.canvas.coords(self.rect) # next state
# reward function
if s_ == self.canvas.coords(self.oval):
reward = 1
done = True
elif s_ in [self.canvas.coords(self.hell1), self.canvas.coords(self.hell2)]:
reward = -1
done = True
else:
reward = 0
done = False
return s_, reward, done
def render(self):
time.sleep(0.1)
self.update()














 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











