







opencv 特征点提取、匹配(二)
demo: http://download.csdn.net/detail/keen_zuxwang/9852587
RANSAC是“RANdom SAmple Consensus随机抽样一致”的缩写。
它可以从一组包含“局外点”的观测数据集中,通过迭代方式估计数学模型的参数。
它是一种不确定的算法——它有一定的概率得出一个合理的结果,为了提高概率必须提高迭代次数。
该算法最早由Fischler和Bolles于1981年提出。
RANSAC的基本假设是:
1、数据由“局内点”组成,如:数据的分布可以用一些模型参数来解释;
2、“局外点”是不能适应该模型的数据;
3、除此之外的数据属于噪声。局外点产生的原因有:噪声的极值;错误的测量方法;对数据的错误假设
//! computes the best-fit perspective transformation mapping srcPoints to dstPoints.
CV_EXPORTS_W Mat findHomography( InputArray srcPoints, InputArray dstPoints,
int method=0, double ransacReprojThreshold=3,
OutputArray mask=noArray());功能寻找两个平面匹配上的关键点的变换
srcPoints:
原始平面中点的坐标,一个CV_32FC2 or vector 型矩阵;
dstPoints:
目标平面中点的坐标,一个CV_32FC2 or vector 型矩阵;
method:
用于计算单应矩阵的方法,是一个枚举值(默认为0,表示使用所有点的常规方法)
CV_RANSAC:基于RANSAC的鲁棒方法;
CV_LMEDS:最不平均方法;
ransacReprojThreshold:
仅当使用CV_RANSAC方法时,把一双点作为内窗的最大投影误差;
mask:
鲁棒方法的可选输出掩码设置;
mask参数,若有N个匹配点用来计算单应矩阵,则该值有N个元素,每个元素的值为0或者1.
值为0时,代表该匹配点事错误的匹配(离群值),只在使用RANSAC和LMeds方法时该值有效,
可以使用该值来删除错误的匹配—指出匹配的点是不是离群值,用来优化匹配结果
//! performs perspective transformation of each element of multi-channel input matrix
CV_EXPORTS_W void perspectiveTransform(InputArray src, OutputArray dst, InputArray m );功能:向量的投影矩阵转换
src:
输入2通道或3通道的浮点阵列,每个元素是一个将被转换的2D/3D向量;
dst:
与输入有相同大小、类型的输出矩阵;
m:
3x3 或4x4的浮点转换矩阵;
// Draws matches of keypints from two images on output image.
CV_EXPORTS void drawMatches( const Mat& img1, const vector<KeyPoint>& keypoints1,
const Mat& img2, const vector<KeyPoint>& keypoints2,
const vector<DMatch>& matches1to2, Mat& outImg,
const Scalar& matchColor=Scalar::all(-1), const Scalar& singlePointColor=Scalar::all(-1),
const vector<char>& matchesMask=vector<char>(), int flags=DrawMatchesFlags::DEFAULT );功能:从两幅图片中画出发现的匹配的关键点
img1:源图像
img2:源图像;
keypoints1:源图像中的关键点
keypoints2:源图像中的关键点;
matches1to2:从第一幅图像来匹配第二幅图像,即从keypoints1[i]中寻找与keypoints2[i]的对应点;
outImg:输出图像;它的值取决于flags–在图像中绘制的内容;
matchColor:
匹配颜色(线和点的颜色),matchColor==Scalar::all(-1),颜色随机生成;
singlePointColor:
单个关键点的颜色(即没有关键点与之匹配),matchColor==Scalar::all(-1),颜色随机生成;
matchesMask:
掩码决定画哪个匹配的关键点,如果掩码为空,画出所有的匹配的关键点;
flags:设置绘图功能,可能标志位的值由“DrawMatchesFlags”确定;
JNI :
JNIEXPORT jlong JNICALL Java_com_example_orbhog_MainActivity_doFeatureMatch(JNIEnv *env, jclass clz, jlong imgObject, jlong imgScene)
{
Mat img_object = Mat(*(Mat*)imgObject);
cvtColor(img_object, img_object, CV_BGRA2BGR);
Mat img_scene = Mat(*(Mat*)imgScene);
cvtColor(img_scene, img_scene, CV_BGRA2BGR);
LOGD(" featureTest %d, %d !",img_object.cols, img_object.rows);
//initModule_nonfree();//only for SIFT or SURF
//#include "opencv2/features2d/features2d.hpp"中声明过了才能有效创建
Ptr<FeatureDetector> detector = FeatureDetector::create("ORB"); // FAST
Ptr<DescriptorExtractor> descriptor = DescriptorExtractor::create("ORB"); // BRIEF
Ptr<DescriptorMatcher> descriptor_matcher = DescriptorMatcher::create("BruteForce");
if( detector.empty() || descriptor.empty()) {
LOGD(" fail to create detector! ");
}
vector<KeyPoint> keypoints_object, keypoints_scene;
detector->detect( img_object, keypoints_object );
detector->detect( img_scene, keypoints_scene );
Mat descriptors_object, descriptors_scene;
descriptor->compute( img_object, keypoints_object, descriptors_object );
descriptor->compute( img_scene, keypoints_scene, descriptors_scene );
//Mat img_keypoints1,img_keypoints2;
//drawKeypoints(img1,keypoints1,img_keypoints1,Scalar::all(-1),0);
//drawKeypoints(img2,keypoints2,img_keypoints2,Scalar::all(-1),0);
vector<DMatch> matches;
descriptor_matcher->match( descriptors_object, descriptors_scene, matches );
double max_dist = 0;
double min_dist = 50;
long length = matches.size();
LOGD(" FlannBasedMatcher %ld \n", length );
//Quick calculation of max and min distances between keypoints
for(int i=0; i<length; i++) { //descriptors_object.rows
double dist = matches[i].distance;
if( dist < min_dist )
min_dist = dist;
if( dist > max_dist )
max_dist = dist;
}
LOGD("-- Max dist : %f \n", max_dist );
LOGD("-- Min dist : %f \n", min_dist );
//-- Draw only "good" matches (i.e. whose distance is less than 3*min_dist )
vector< DMatch > good_matches;
int m_start = length/4;
int m_end = length - m_start;
for(int i=m_start; i<length; i++) { // descriptors_object.rows
good_matches.push_back(matches[i]);
}
/*
double max_d = max_dist*0.9;
for(int i=0; i<length; i++) { // descriptors_object.rows
if( matches[i].distance > min_dist+ && matches[i].distance<max_d){
good_matches.push_back( matches[i]);
}
}
*/
Mat img_matches;
drawMatches(img_object, keypoints_object, img_scene, keypoints_scene,
good_matches,
img_matches,
Scalar::all(-1),
Scalar::all(-1),
vector<char>(),
DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS );
//-- Localize the object
vector<Point2f> obj;
vector<Point2f> scene;
for( int i = 0; i < good_matches.size(); i++ ) {
//-- Get the keypoints from the good matches
obj.push_back(keypoints_object[good_matches[i].queryIdx].pt); // query descriptor index
scene.push_back(keypoints_scene[good_matches[i].trainIdx].pt); // train descriptor index
}
Mat H = findHomography( obj, scene, CV_RANSAC );
// 根据匹配点计算单应矩阵H,并细化匹配结果(矩阵H存储RANSAC得到的单应矩阵,用于求透视矩阵), 寻找两个平面匹配上的关键点的变换
//Get the corners from the img_object ( the object to be "detected" )
vector<Point2f> obj_corners(4);
obj_corners[0] = cvPoint(0,0);
obj_corners[1] = cvPoint( img_object.cols, 0 );
obj_corners[2] = cvPoint( img_object.cols, img_object.rows );
obj_corners[3] = cvPoint( 0, img_object.rows );
vector<Point2f> scene_corners(4);
perspectiveTransform( obj_corners, scene_corners, H); // 向量的投影矩阵转换
//-- Draw lines between the corners (the mapped object in the scene - img_scene )
line( img_matches, scene_corners[0] + Point2f( img_object.cols, 0), scene_corners[1] + Point2f( img_object.cols, 0), Scalar(0, 255, 0), 4 );
line( img_matches, scene_corners[1] + Point2f( img_object.cols, 0), scene_corners[2] + Point2f( img_object.cols, 0), Scalar( 0, 255, 0), 4 );
line( img_matches, scene_corners[2] + Point2f( img_object.cols, 0), scene_corners[3] + Point2f( img_object.cols, 0), Scalar( 0, 255, 0), 4 );
line( img_matches, scene_corners[3] + Point2f( img_object.cols, 0), scene_corners[0] + Point2f( img_object.cols, 0), Scalar( 0, 255, 0), 4 );
Mat *hist = new Mat(img_matches);
return (jlong) hist;
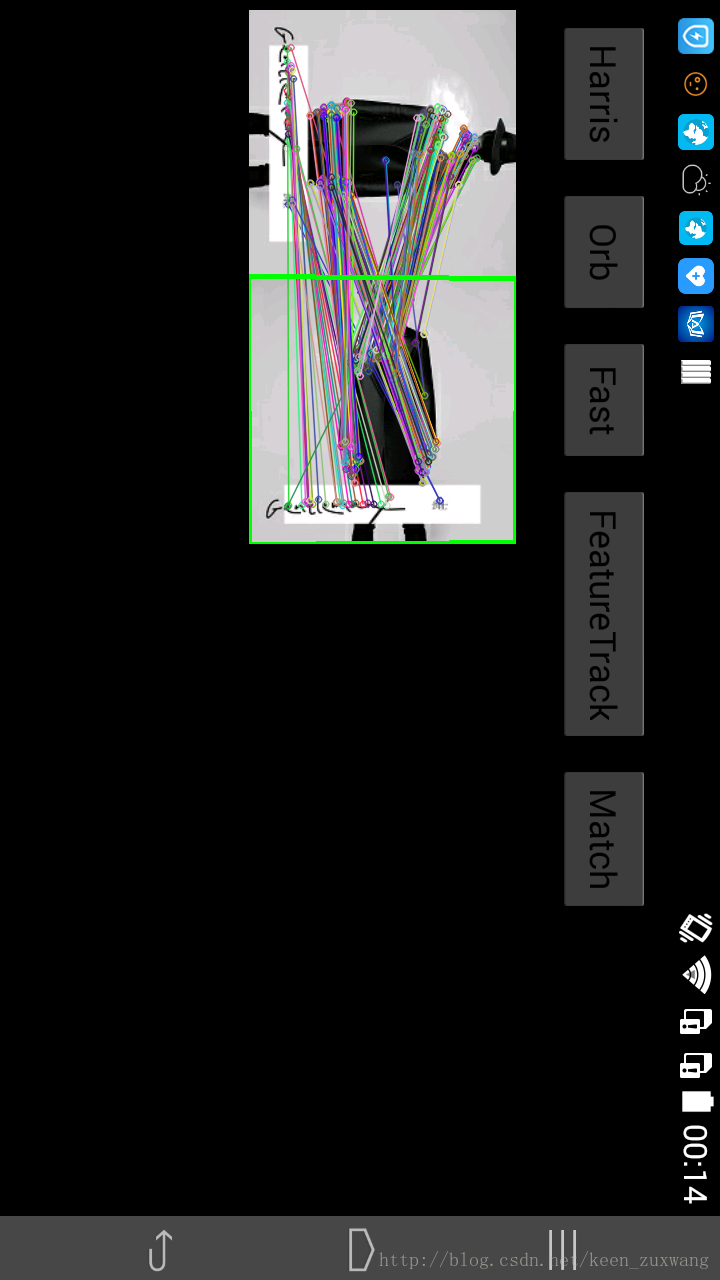
}ORB-ORB 匹配:
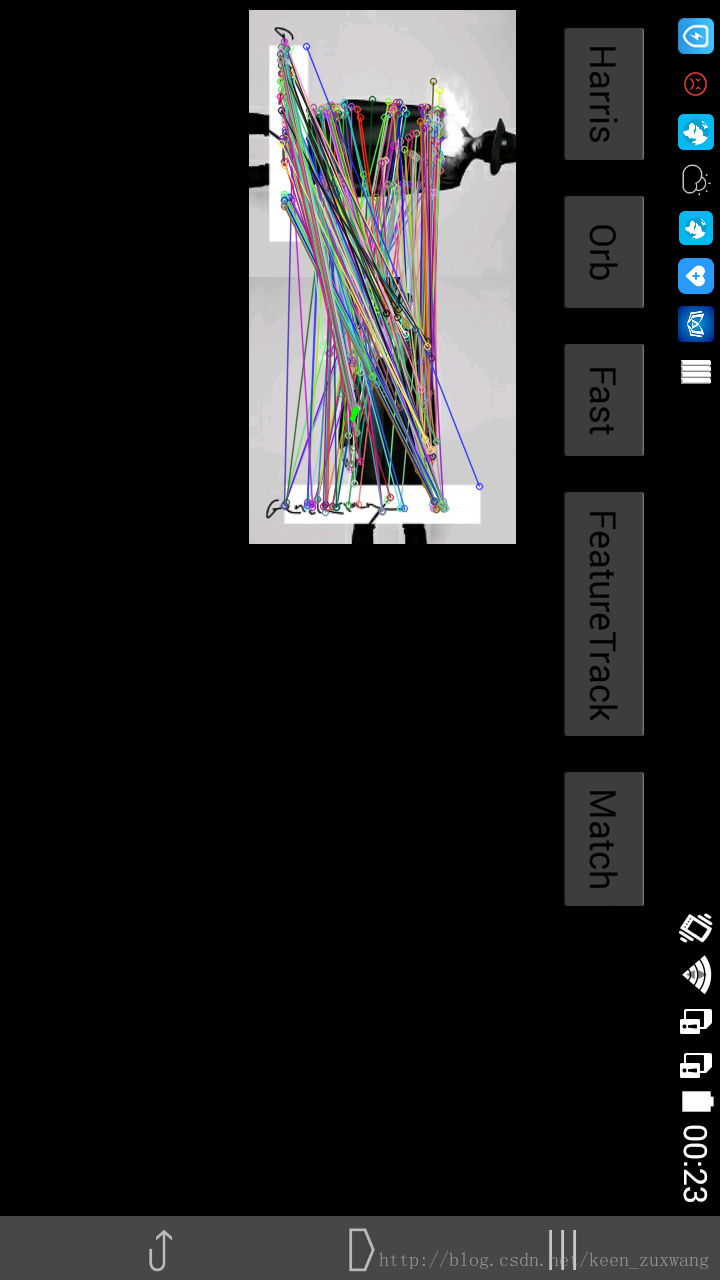
FAST-ORB 匹配:
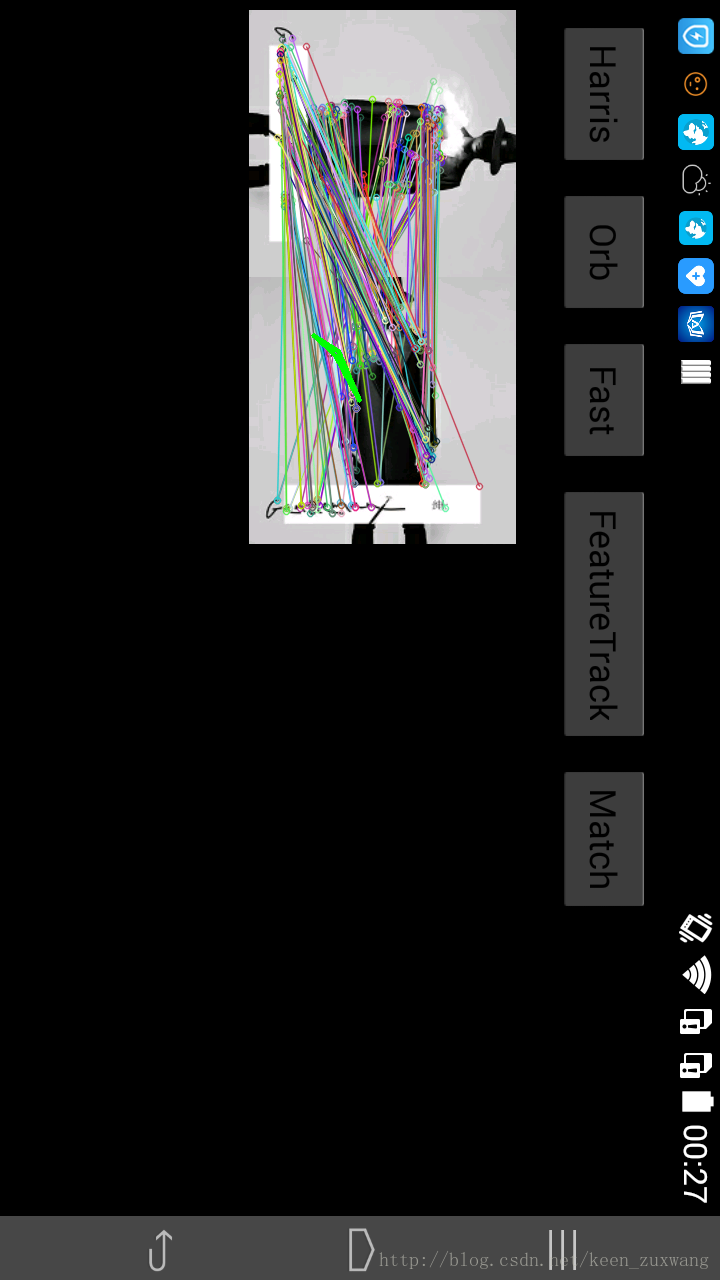
FAST-BRIEF 匹配:














 3946
3946











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









