







贝叶斯估计基础
跟踪问题可以看作是贝叶斯估计问题,用下图模型表示。
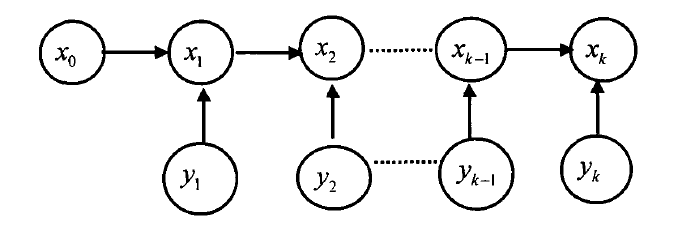
图中
xi
和
yi
分别表示第
i
时刻的目标
从贝叶斯估计的角度看,跟踪问题就是从所有历史观测数据
y1:k={y1,⋯,yk}
中推导出
k
时刻状态
假设状态变量初始概率密度函数作为先验知识已知,那么
p(xk|y1:k)
可以通过以下两式递推得到:
p(xk|y1:k−1)=∫p(xk|xk−1)p(xk−1|y1:k−1)dxk−1(预测方程)(1)
p(xk|y1:k)=p(xk⋅y1:k)p(y1:k)=p(xk⋅yk|y1:k−1)p(yk|y1:k−1)=p(yk|xk)p(xk|y1:k−1)p(yk|y1:k−1)(更新方程)(2)
式中
p(xk|xk−1)
由目标的运动状态方程定义,
p(yk|xk)
则由目标的观测方程定义,
p(yk|y1:k−1)
则为归一化常数,具有如下形式:
p(yk|y1:k−1)=∫p(yk|xk)p(xk|y1:k−1)dxk(3)
公式(1)和公式(2)共同构成了最优贝叶斯估计的基础。














 310
310











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









