







具体内容见 http://wiki.ros.org/costmap_2d
收集传感器信息用于建立和更新二维或三维的地图。ROS的代价地图(costmap)采用网格(grid)形式,每个网格的值(cell cost)从0~255。分成三种状态:被占用(有障碍)、自由区域(无障碍)、未知区域;
具体状态和值对应有下图:
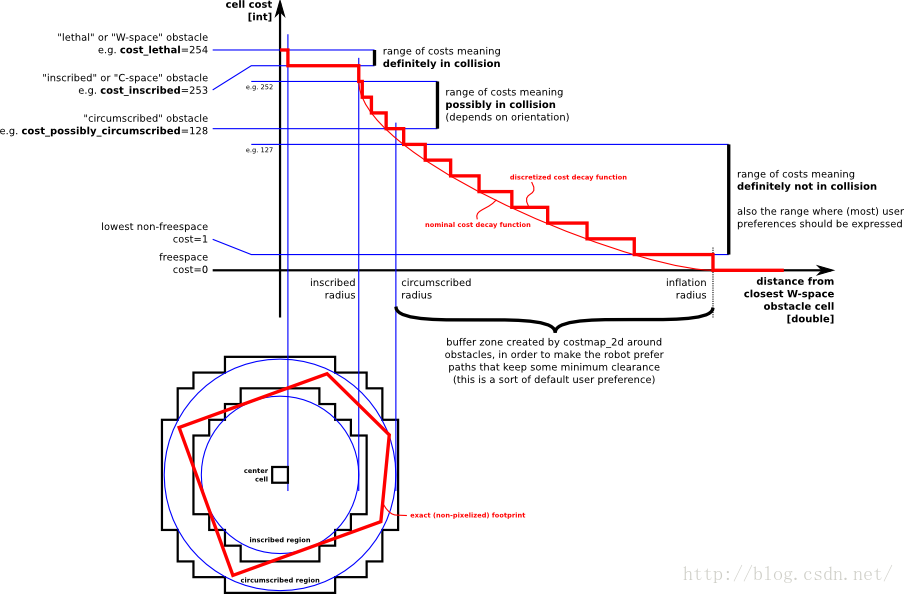
上图可分为五部分,其中红色多边形区域为机器人的轮廓:
1、“lethal”/“W-space”(致命的):假如cost_lethal=254,则x>=254时,机器人的中心与网格中心重合,必然与障碍物发生冲突(defintely in collision);
2、“inscribed”/“C-space”(内接):假如cost_inscribed =253,则253<=x<254时,网格值小于机器人轮廓的内接半径与实际障碍物距离,也会与障碍物发生冲突(defintely in collision);(网格的内接圆与机器人轮廓外切或相交??)
3、“circumscribed”(外接):假如cost_possibly_circumscribed=128,则128<=x<253时,网格的外接圆与机器人轮廓外切或相交,机器人向障碍物靠近,所以可能与障碍物发生冲突(possibly in collision),取决于方向/定位(orientation);
4、自由区域:1<=x<128,没有障碍物区域,一定不会发生冲突(defintely not in collision);
5、未知区域:0<=x<1。
根据离最近的致命障碍物网格的距离划分:
【inscribed radius】内接半径;
【circumscribed radius】 外接半径>>两者之间为缓冲区域<<【inflation radius】膨胀半径;














 6139
6139











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









