










SGM算法源于《Stereo Processing by Semi-Global Matching and Mutual Information》一文,我认为这篇文章是立体匹配算法中最给力的,放眼KITTI,可以发现目前排名前五十的算法几乎一半都是对SGM的改进,具有最强的实用价值。SGM中文名称“半全局匹配”,顾名思义,其介于局部算法和全局算法之间,所谓半全局指的是算法既没有只考虑像素的局部区域,也没有考虑所有的像素点。例如,BM计算某一点视差的时候,往往根据目标像素周围的矩形区域进行代价聚合计算;DoubleBP在计算目的像素视差的时候,考虑的则是图像所有的像素点。抛开具体的方法不说,SGM中考虑到的只有非遮挡点,这正是定义为半全局的原因。
(转载:http://blog.csdn.net/wsj998689aa/article/details/49464017, 作者:迷雾forest)
有的童鞋这时可能会想到Non-Local,为啥它要叫“非局部”,难道也是一种半全局算法?我认为不是,NLCA的目的是构建代价聚合项,它没有能量函数构建优化过程,而构建代价聚合基本上是局部算法才要做的事情,然而基于的却是所有的像素点,所以被称为非局部,并且NLCA和SGM的套路也完全不同。
我总是喜欢在博客开头扯一点之前写过的算法,回归正题,SGM的文献比较晦涩,作者Heiko Hirschmuller进行了大篇幅的论述,其中涉及到了很多的细节,最开始读这篇文献的时候我完全不理解算法的细节,但是SGM又经典的不行,没办法只能在反复理解论文的同时,结合代码进行理解。这篇文章主要涉及三个部分:分层互信息的代价计算+基于动态规划的代价聚合+其他,我打算分别基于这三个部分写三篇博客,与童鞋们分享我对SGM的理解。
和所有的立体匹配算法一样,SGM的第一步也是代价计算,它采用了基于互信息的计算方法,互信息是一种熵。那我们就先说说熵,熵是用来表征随机变量的不确定性(可以理解为变量的信息量),不确定性越强那么熵的值越大(最大为1),那么图像的熵其实就代表图像的信息量。互信息度量的是两个随机变量之间的相关性,相关性越大,那么互信息就越大。可以想想看,两幅图像如果匹配程度非常高,说明这两幅图像相关性大还是小?显然是大,知道一幅图像,另外一幅图像马上就知道了,相关性已经不能再大了!!!反之,如果两幅图像配准程度很低,那么两幅图像的互信息就会非常小。所以,立体匹配的目的当然就是互信息最大化。这就是为什么使用互信息的原因。熵和互信息的定义分别如下所示:

其中,互信息的前两项是图像的熵,最后一项叫做联合熵,联合熵是熵的变种,其依赖的自然是联合概率分布(熵依赖的是概率分布),联合熵的公式如下所示:

这时,一个最自然的问题是,图像的概率分布P是什么意思?答案一句话,图像的灰度直方图。图像的灰度值是0~255,每个灰度值对应的像素个数除以图像像素个数就是该灰度值对应的概率,单幅图像的概率密度是一维的,那么自然地,两幅图像的联合概率密度就是二维的,它的定义域取值就是(0,0)~(255,255),公式如下所示:

其中,(i,k)指的是像素灰度值对,I1和I2分别代表了左图和矫正之后的右图,p代表像素点,n代表着像素的总数,公式的含义是统计不同灰度值对的个数并归一化。因此,两幅图像对应的概率分布可以用一幅图表示,这幅图的大小一定是256*256,弄清楚这点很重要,我之前一直误以为上述公式中的(i,k)指的是像素坐标,其实上面的公式只想告诉我们一件事情:联合概率分布就是归一化之后的统计直方图。
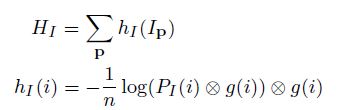
弄清楚了P的含义,就可以进一步说说熵的构造了,作者先说了联合熵的定义,在这里作者引用了其他文献的研究成果,直接用泰勒展开近似联合熵为像素和的形式,如下所示:
其中,作者称h为数据项,注意看它的自变量是像素灰度值,所以可以事先建立一个查表,将每个灰度值对的h值都保存下来(一共有256*256),那么联合熵的计算速度就会很快,h的计算公式如下所示:

其中,g(i,k)指的是高斯平滑,正如前面所说,P是一幅表征概率值的图像(分辨率恒为256*256),正是针对这幅图像进行平滑处理,但是作者却在这里称之为Parzen估计,我想来想去觉得是一个意思,Parzen估计是一种非参数估计方法,不需要事先假设数学模型的参数形式而直接估计单点的概率值,最常用的Parzen窗函数就是高斯核函数。作者提供了一个图示也可以说明这个问题:
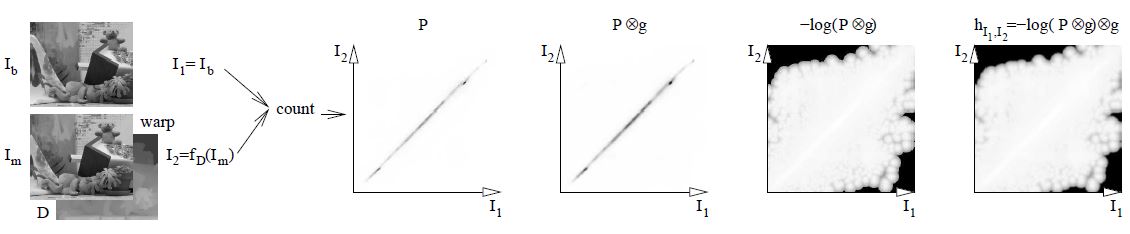
其中,第一个坐标系就是联合概率分布图,由于事先要对匹配图像(一般是右图)基于视差图进行修正(warp),调整右图像素的位置,使得左右两图尽可能相同之后计算同一像素位置的联合概率,由此导致了诸如(10,10)、(25,25)、(125,125)这样的灰度值对的概率值更大一些。再对这样的图像进行7*7窗口大小的高斯平滑处理,高斯平滑的目的是消除噪音,因为这里基于的视差图是很粗糙的(只有非遮挡点才有视差值,遮挡点的视差都为0),根据这样的视差图对右图进行处理,难免一些位置所对应的两图灰度值不相等,体现在P图上就是噪音,这个时候当然要平滑。例如可能有(10,100)这样的灰度值对出现,这说明右图该点经过warp之后很可能是错误的,但是这种情况肯定是少数,对应的概率值也就是很小,体现在P图上就是一个噪音点,用高斯平滑处理,一下子就没了。其实这就是检测outlier,去除outlier的另外一种手段,只不过SGM是从概率分布的角度处理罢了,而其他的算法一般都是从空间分布来处理outlier。进一步,取负对数便得到了h值的图示,最后得到了图像的联合熵图。
其实,平滑归平滑,也只是基于256*256的图像进行平滑,只需根据像素位置计算出权重即可,同样可以根据查表的方式实现,这和具体的双目图像大小仍旧无关,一个不小的优点哦!
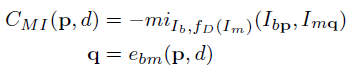
作者为什么要用互信息来计算代价匹配值?根据文献给出的信息,作者是考虑到了互信息对光照具有鲁棒性,我们注意看下面的公式,这个计算方式很有意思,我们已经得到了互信息图,剩下要做的事情只是根据左图和右图挑选出来的像素点的灰度值对,在互信息图中直接查找就行(又是一个速度优势),注意:要取个负号,这点直觉上很好理解,互信息越大->相关性越大->两个点的匹配程度越高->代价计算值理应越小,童鞋们千万不要忘记WTA是怎么运作的啊!!!!
大家有没有觉得作者在此处的思维很是特别?先根据一个视差图作为先验来确定互信息图,然后基于这样的互信息图去计算各个视差的代价,这在理论上显然会导致第一步得到的视差图非常近似于初始视差图!!!难怪作者花了大篇幅介绍HMI,但是却没有给出中间结果。好比是法官审判一个杀人罪犯,他的判罚依据竟然是另一个抢劫罪犯的判罚结果,而不是根据其他杀人罪犯的判罚结果。此处我觉得有点怪,拿出来说说,大家都想想看哈。
本来熵和联合熵的计算方法不同,但是由于遮挡点的问题,将二者都设置为相同,都采用泰勒近似的方式。具体来说,图像的熵是基于图像的概率分布来计算的,但由于遮挡点的存在,有些像素根本就不会有匹配点,如果也将这样的像素考虑在内恐怕不合适,别忘了我们的目的是令能够匹配的点尽量匹配,不能匹配的点我们根本就没必要让它们匹配,于是将目光放在了联合熵的定义上,联合熵是基于联合概率分布的,其基于的点可以保证都是匹配点,这样的概率公式如下所示:

进一步,基于这样的概率分布得到的图像熵公式如下所示:
最后,作者采用分层互信息(HMI)进行代价匹配计算,由于概率分布图和图像大小无关(一直都是256*256),所以可以采用分层计算的方式来加速(反正不同层都是256*256),每一层的计算对应一次迭代,别忘记首次迭代需要基于视差图对右图进行warp,没有视差图怎么办?文章里面说是随机生成就好,并且由于像素个数很多,随机生成的个别错误可以被容忍,warp之后的右图和左图的匹配程度还是会比较高,迭代次数也相对较低,这也是SGM的一大优点。
作者还对HMI的时间复杂度进行了计算,由于单次迭代的时间复杂度是O(WHD),每次下采样都会令三个参数同时减半,所以上次迭代将会是当前迭代速度的1/8,假设我们有4次迭代,那么相比较于BT算法,只比它慢了14%,注意,算法首次迭代使用的是最小的视差图,并且乘以3的原因是随机生成的视差图十分不靠谱,需要反复迭代3次才能得到同样分辨率下的靠谱视差图,然后再参与后续高分辨率的计算。

总结:HMI是SGM的重要一步骤,通过HMI计算得到的代价匹配值对光照鲁棒,一旦这步做好了,后续的代价聚合,迭代求精等等操作弄起来就轻松多了。
后记:今天回答了关于这篇文章的几位朋友的提问,又重新看了HMI这部分内容,其实HMI的计算过程我虽然进行了解释,但是仍旧有两个核心问题没有明确说明,这两个问题是:
1. 对互信息基于泰勒展开进行近似计算的具体过程是什么?
2. 联合熵中的两个卷积是根据泰勒展开得到的,还是故意加上的?
因为此部分内容涉及到公式推理,在《Visual Correspondence Using Energy Minimization and Mutual Information》一文中有比较详细的推理过程,感兴趣的朋友可以去仔细看看,本文中就不详细说明了,希望和大家继续探讨。














 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









