







最近在学习图论相关知识,读到二分图最大匹配问题的匈牙利算法,感觉很有意思,所以记录下来。
概念
在假设读者已经了解图论最最基本的概念的基础上(例如:顶点、边、路径、圈),我们先来看一下二分图特有的概念定义。
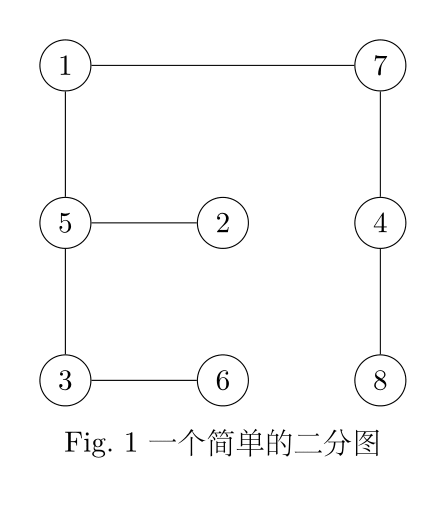
二分图(Bigraph, Bipartite graph)是一种特殊的图,它的顶点可以被分成两个不相交的集合( U U 和 V V),并且同属一个集合内的点两两不相连( EU=EV=∅ EU=EV=∅)。这也就是说,如果一个图是二分图,那么它要么没有圈,要么圈所包含的边的数量必定是偶数。
Fig. 1 是一个简单的二分图
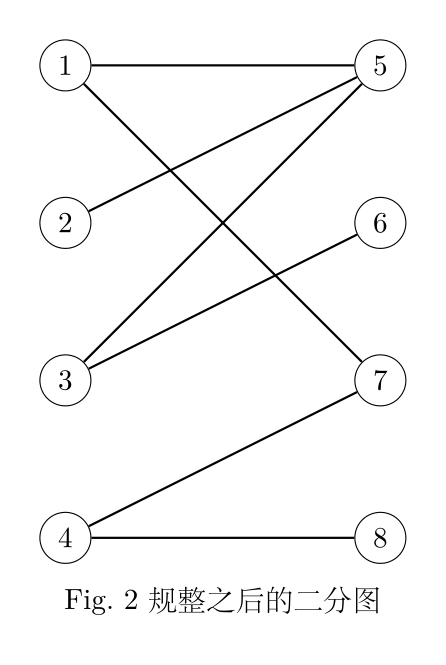
为了方便观看我们通常将它画为 Fig. 2 的形式:
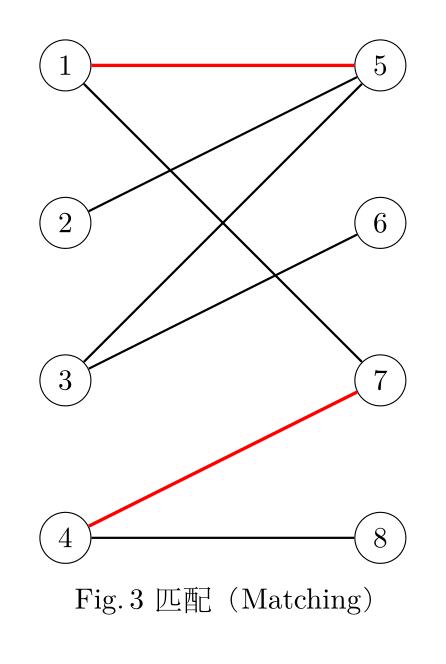
匹配(Matching)是边的集合( M⊂E M⊂E),其中任意两条边不共点( ∀e1,e2∈M s.t. e1∩e2=∅ ∀e1,e2∈M s.t. e1∩e2=∅)。Fig. 3 中标红的边组成的集合,就是一个匹配。这些标红的边,被称为匹配边;匹配边所连接的点则被称为匹配点。同理可以定义非匹配边和非匹配点的概念。
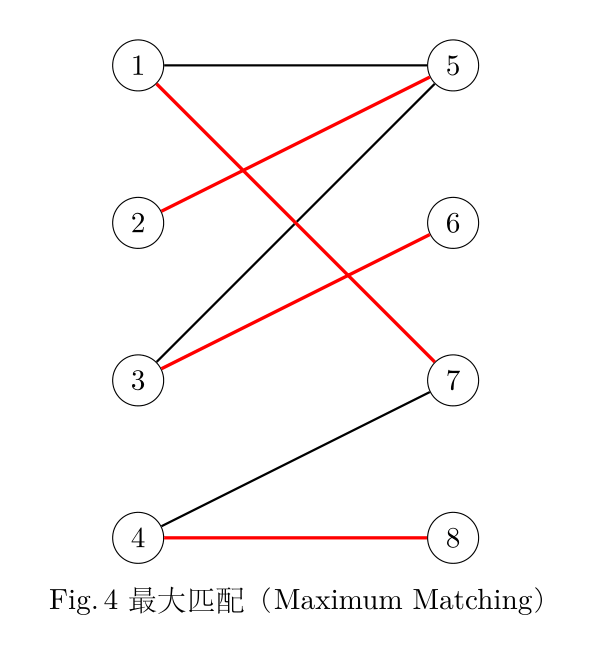
显而易见,对于一个二分图来说,可能有很多种匹配。如果二分图里的某一个匹配包含的边的数量,在该二分图的所有匹配中最大,那么这个匹配称为最大匹配(Maximum Matching)。Fig. 4 是最大匹配的示例。
在二分图的匹配中,如果一条路径的首尾是非匹配点,路径中除此之外(如果有)其他的点均是匹配点,那么这条路径就是一条增广路径(Agumenting path)。Fig. 5 中,粗红线标出的是匹配路径和匹配点。
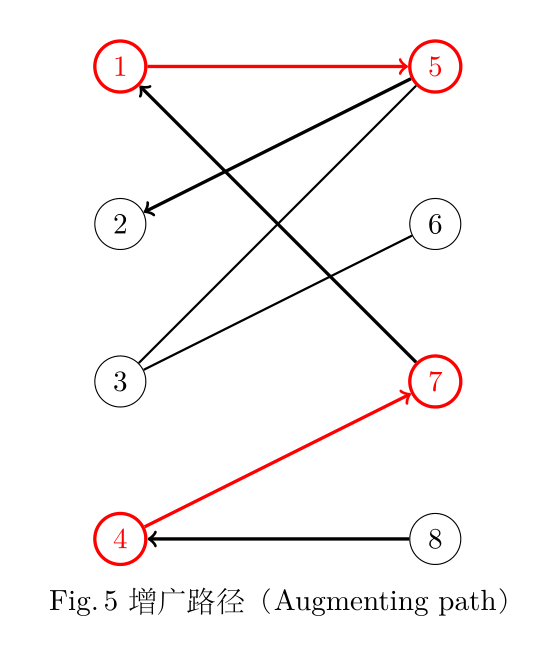
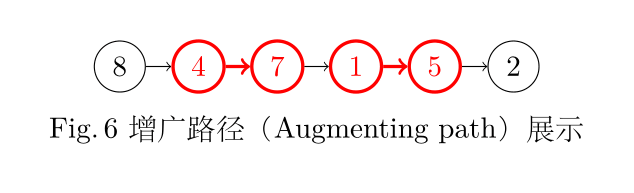
显而易见,8->4->7->1->5->2 是一条增广路径。因为 8 和 2 作为路径的首尾是非匹配点,而路径中剩余的 4/7/1/5 均是匹配点。
匈牙利算法
增广路径的首尾是非匹配点。因此,增广路径的第一条和最后一条边,必然是非匹配边;同时它的第二条边(如果有)和倒数第二条边(如果有),必然是匹配边;以及第三条边(如果有)和倒数第三条边(如果有),一定是非匹配边。
亦即,增广路径从非匹配边开始,匹配边和非匹配边依次交替,最后由非匹配边结束。这样一来,增广路径中非匹配边的数目会比匹配边大 1。
如果我们置换增广路径中的匹配边和非匹配边,由于增广路径的首尾是非匹配点,其余则是匹配点,这样的置换不会影响原匹配中其他的匹配边和匹配点,因而不会破坏匹配;亦即增广路径的置换,可以得到比原有匹配更大的匹配(具体来说,匹配的边数增加了 1)。
由于二分图的最大匹配必然存在(比如,上限是包含所有顶点的完全匹配),所以,再任意匹配的基础上,如果我们有办法不断地搜寻出增广路径,直到最终我们找不到新的增广路径为止,我们就有可能得到二分图的一个最大匹配。这就是匈牙利算法的核心思想。
唯一的问题在于,在这种贪心的思路下,我们如何保证不存在例外的情况,即:当前匹配不是二分图的最大匹配,但已找不到一条新的增广路径。
我们从反证法考虑,即假设存在这样的情况。因为当前匹配不是二分图的最大匹配,那么在两个集合中,分别至少存在一个非匹配点。那么情况分为两种:
- 这两个点之间存在一条边——那么我们找到了一条新的增广路径,产生矛盾;
- 这两个点之间不存在直接的边,即这两个点分别都只与匹配点相连——那么:
- 如果这两个点可以用已有的匹配点相连,那么我们找到了一条新的增广路径,产生矛盾;
- 如果这两个点无法用已有的匹配点相连,那么这两个点也就无法增加匹配中边的数量,也就是我们已经找到了二分图的最大匹配,产生矛盾。
在所有可能的情况,上述假设都会产生矛盾。因此假设不成立,亦即贪心算法必然能求得最大匹配的解。














 7万+
7万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









