







玩ros也有一段时间了,总是在vim环境下写代码,当遇到调试大的代码时,我还是喜欢用ide开发环境,方便好用。
因为在ubuntu开发环境下,所以我选择了用qt的开发环境,好用,也方便(以前用过qt),首先我们安装好qtcreator的开发环境,这个不说了。可以直接安装去官网下载安装包。当安装好qt后,我们进入一个ros功能包,我的是:
roscd opencv_text 进入我的功能包后,打开CMakeLists.txt文件,开始添加我们要添加的库的头文件和path。我把我的配置贴出来:`这里写代码片`
cmake_minimum_required(VERSION 2.8.3)
project(opencv_text)
## Find catkin macros and libraries
## if COMPONENTS list like find_package(catkin REQUIRED COMPONENTS xyz)
## is used, also find other catkin packages
find_package(catkin REQUIRED COMPONENTS
cv_bridge
image_transport
roscpp
rospy
sensor_msgs
std_msgs
tf
)
set(ARUCO_PATH /usr/local)
SET(CMAKE_MODULE_PATH ${ARUCO_PATH}/lib/cmake )
SET(ARUCO_INCLUDE_DIRS ${ARUCO_PATH}/include/aruco )
find_package(OpenCV REQUIRED)
find_package(aruco REQUIRED )
INCLUDE(FindPkgConfig)
set(ROS_BUILD_TYPE Debug)
## System dependencies are found with CMake's conventions
# find_package(Boost REQUIRED COMPONENTS system)
## Uncomment this if the package has a setup.py. This macro ensures
## modules and global scripts declared therein get installed
## See http://ros.org/doc/api/catkin/html/user_guide/setup_dot_py.html
# catkin_python_setup()
################################################
## Declare ROS messages, services and actions ##
################################################
## To declare and build messages, services or actions from within this
## package, follow these steps:
## * Let MSG_DEP_SET be the set of packages whose message types you use in
## your messages/services/actions (e.g. std_msgs, actionlib_msgs, ...).
## * In the file package.xml:
## * add a build_depend tag for "message_generation"
## * add a build_depend and a run_depend tag for each package in MSG_DEP_SET
## * If MSG_DEP_SET isn't empty the following dependency has been pulled in
## but can be declared for certainty nonetheless:
## * add a run_depend tag for "message_runtime"
## * In this file (CMakeLists.txt):
## * add "message_generation" and every package in MSG_DEP_SET to
## find_package(catkin REQUIRED COMPONENTS ...)
## * add "message_runtime" and every package in MSG_DEP_SET to
## catkin_package(CATKIN_DEPENDS ...)
## * uncomment the add_*_files sections below as needed
## and list every .msg/.srv/.action file to be processed
## * uncomment the generate_messages entry below
## * add every package in MSG_DEP_SET to generate_messages(DEPENDENCIES ...)
## Generate messages in the 'msg' folder
# add_message_files(
# FILES
# Message1.msg
# Message2.msg
# )
## Generate services in the 'srv' folder
# add_service_files(
# FILES
# Service1.srv
# Service2.srv
# )
## Generate actions in the 'action' folder
# add_action_files(
# FILES
# Action1.action
# Action2.action
# )
## Generate added messages and services with any dependencies listed here
# generate_messages(
# DEPENDENCIES
# sensor_msgs# std_msgs
# )
################################################
## Declare ROS dynamic reconfigure parameters ##
################################################
## To declare and build dynamic reconfigure parameters within this
## package, follow these steps:
## * In the file package.xml:
## * add a build_depend and a run_depend tag for "dynamic_reconfigure"
## * In this file (CMakeLists.txt):
## * add "dynamic_reconfigure" to
## find_package(catkin REQUIRED COMPONENTS ...)
## * uncomment the "generate_dynamic_reconfigure_options" section below
## and list every .cfg file to be processed
## Generate dynamic reconfigure parameters in the 'cfg' folder
# generate_dynamic_reconfigure_options(
# cfg/DynReconf1.cfg
# cfg/DynReconf2.cfg
# )
###################################
## catkin specific configuration ##
###################################
## The catkin_package macro generates cmake config files for your package
## Declare things to be passed to dependent projects
## INCLUDE_DIRS: uncomment this if you package contains header files
## LIBRARIES: libraries you create in this project that dependent projects also need
## CATKIN_DEPENDS: catkin_packages dependent projects also need
## DEPENDS: system dependencies of this project that dependent projects also need
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES opencv_text
# CATKIN_DEPENDS cv_bridge image_transport roscpp rospy sensor_msgs std_msgs tf
# DEPENDS system_lib
)
###########
## Build ##
###########
## Specify additional locations of header files
## Your package locations should be listed before other locations
# include_directories(include)
include_directories(
${catkin_INCLUDE_DIRS}
)
## Declare a C++ library
# add_library(opencv_text
# src/${PROJECT_NAME}/opencv_text.cpp
# )
## Add cmake target dependencies of the library
## as an example, code may need to be generated before libraries
## either from message generation or dynamic reconfigure
# add_dependencies(opencv_text ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
## Declare a C++ executable
# add_executable(opencv_text_node src/opencv_text_node.cpp)
## Add cmake target dependencies of the executable
## same as for the library above
# add_dependencies(opencv_text_node ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
## Specify libraries to link a library or executable target against
# target_link_libraries(opencv_text_node
# ${catkin_LIBRARIES}
# )
#############
## Install ##
#############
# all install targets should use catkin DESTINATION variables
# See http://ros.org/doc/api/catkin/html/adv_user_guide/variables.html
## Mark executable scripts (Python etc.) for installation
## in contrast to setup.py, you can choose the destination
# install(PROGRAMS
# scripts/my_python_script
# DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
# )
## Mark executables and/or libraries for installation
# install(TARGETS opencv_text opencv_text_node
# ARCHIVE DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
# LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
# RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
# )
## Mark cpp header files for installation
# install(DIRECTORY include/${PROJECT_NAME}/
# DESTINATION ${CATKIN_PACKAGE_INCLUDE_DESTINATION}
# FILES_MATCHING PATTERN "*.h"
# PATTERN ".svn" EXCLUDE
# )
## Mark other files for installation (e.g. launch and bag files, etc.)
# install(FILES
# # myfile1
# # myfile2
# DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}
# )
#############
## Testing ##
#############
## Add gtest based cpp test target and link libraries
# catkin_add_gtest(${PROJECT_NAME}-test test/test_opencv_text.cpp)
# if(TARGET ${PROJECT_NAME}-test)
# target_link_libraries(${PROJECT_NAME}-test ${PROJECT_NAME})
# endif()
## Add folders to be run by python nosetests
# catkin_add_nosetests(test)
include_directories(${ARUCO_INCLUDE_DIRS} ${OpenCV_INCLUDE_DIRS} ${catkin_INCLUDE_DIRS})
add_executable(aruco_marker src/aruco_marker.cpp)
target_link_libraries(aruco_marker ${catkin_LIBRARIES} ${OpenCV_LIBRARIES} ${aruco_LIBS})我们添加的主要是这几行:
set(ARUCO_PATH /usr/local) #这句主要是设置一个变量
SET(CMAKE_MODULE_PATH ${ARUCO_PATH}/lib/cmake )#这句主要是设置CMAKE_MODULE_PATH的path,我们要按照自己的实际路径配置,我的在/usr/local/lib/cmake一般来说都在这里。
SET(ARUCO_INCLUDE_DIRS ${ARUCO_PATH}/include/aruco )#这个设置aruco的库的头文件,根据自己的实际位置包含
find_package(OpenCV REQUIRED) #这两句都是调用预定义在CMAKE_MODULE_PATH下的Find<name>.cmake模块
find_package(aruco REQUIRED )
INCLUDE(FindPkgConfig)
set(ROS_BUILD_TYPE Debug) #调试作用
include_directories(${ARUCO_INCLUDE_DIRS} ${OpenCV_INCLUDE_DIRS} ${catkin_INCLUDE_DIRS})#这句是包含三个库的文件以上是主要添加的CMAKE配置文件的信息,如果大家添加.cPP文件,如下:
add_executable(aruco_marker src/aruco_marker.cpp)
target_link_libraries(aruco_marker ${catkin_LIBRARIES} ${OpenCV_LIBRARIES} ${aruco_LIBS})其中aruco_marker是我要生成的可执行文件,aruco_marker.cpp就是我们包里src/下的C渣渣文件,等这些搞定后我们就打开qtcreator,
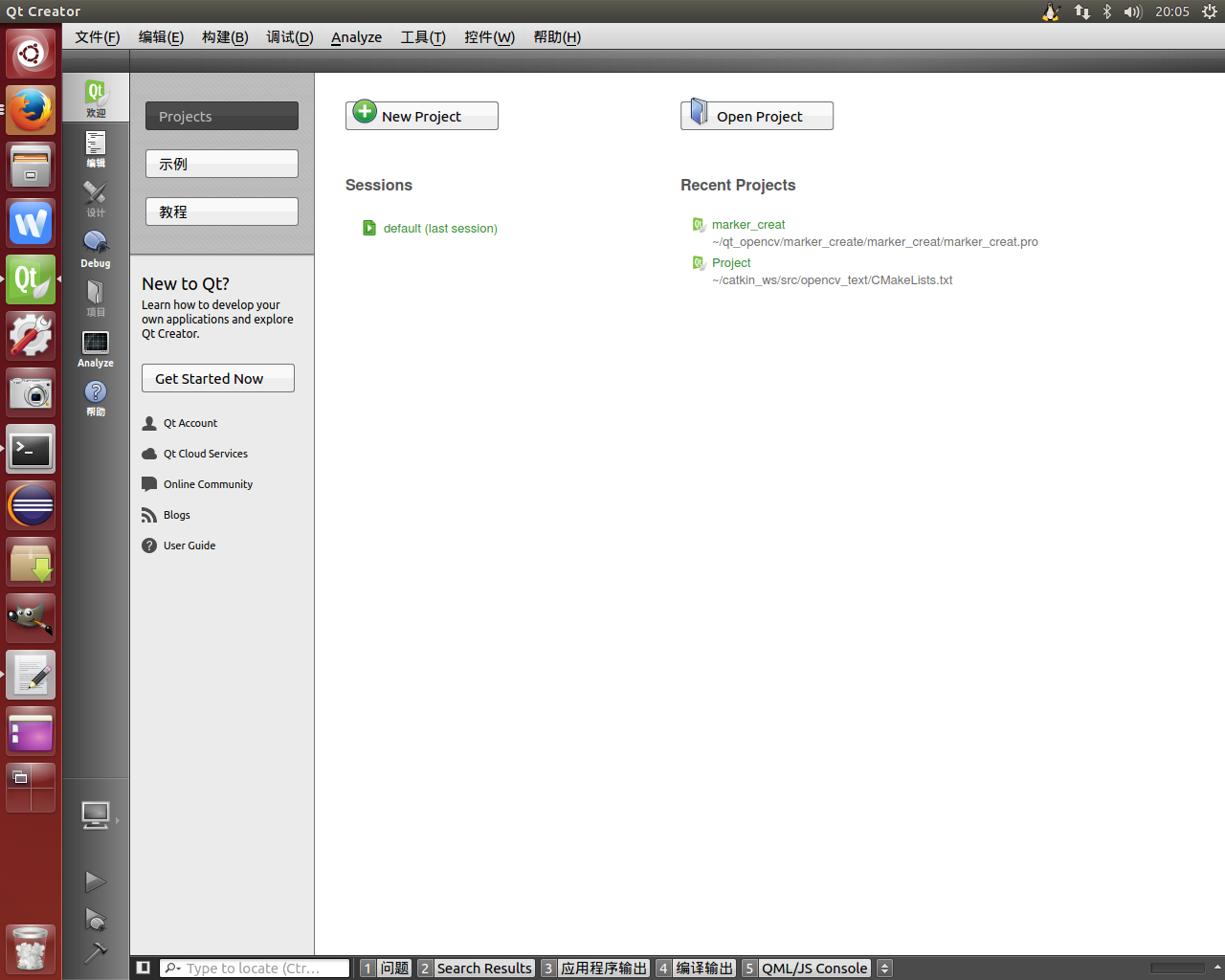
然后点开open project,添加我们的cmakelists.txt文件,
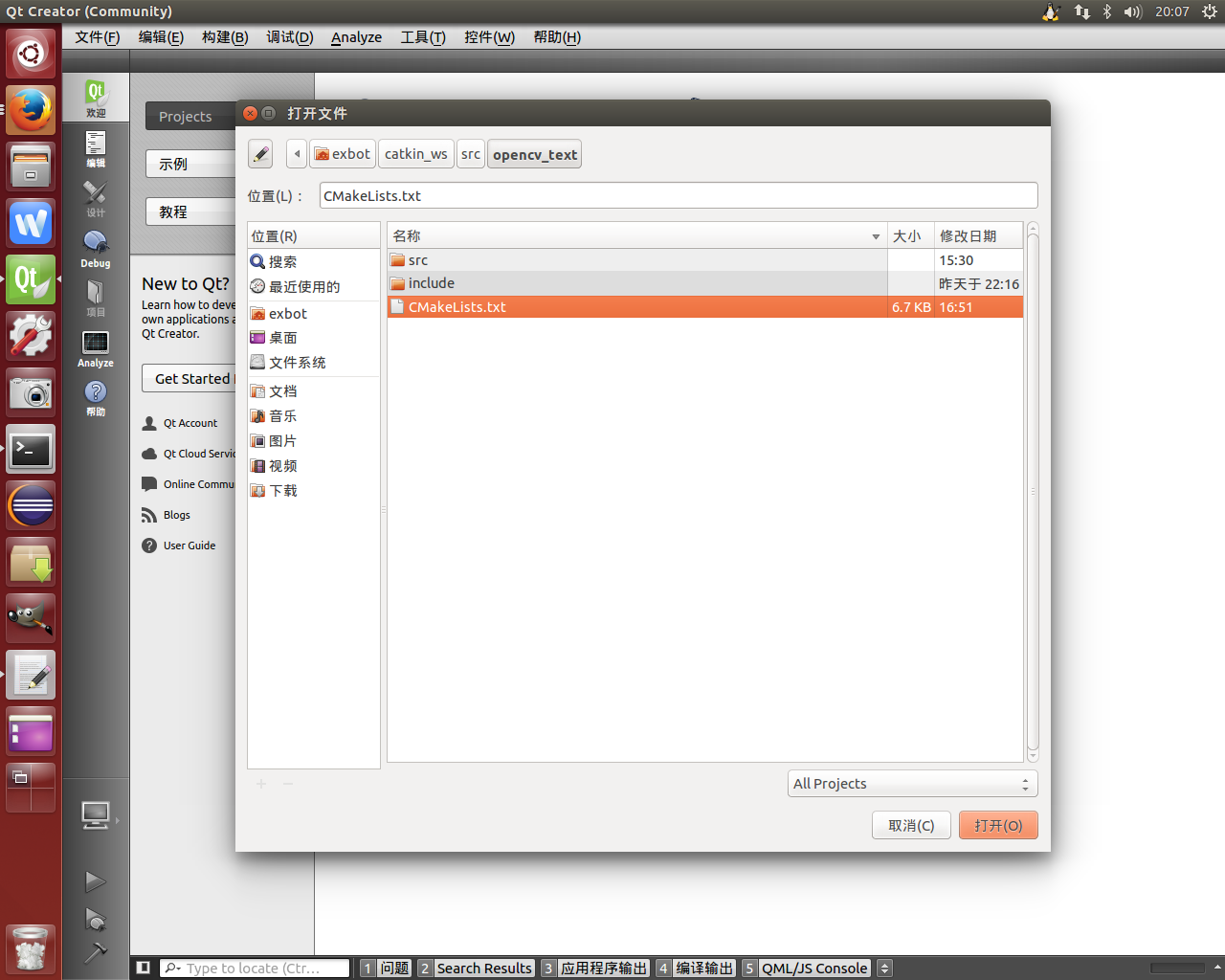
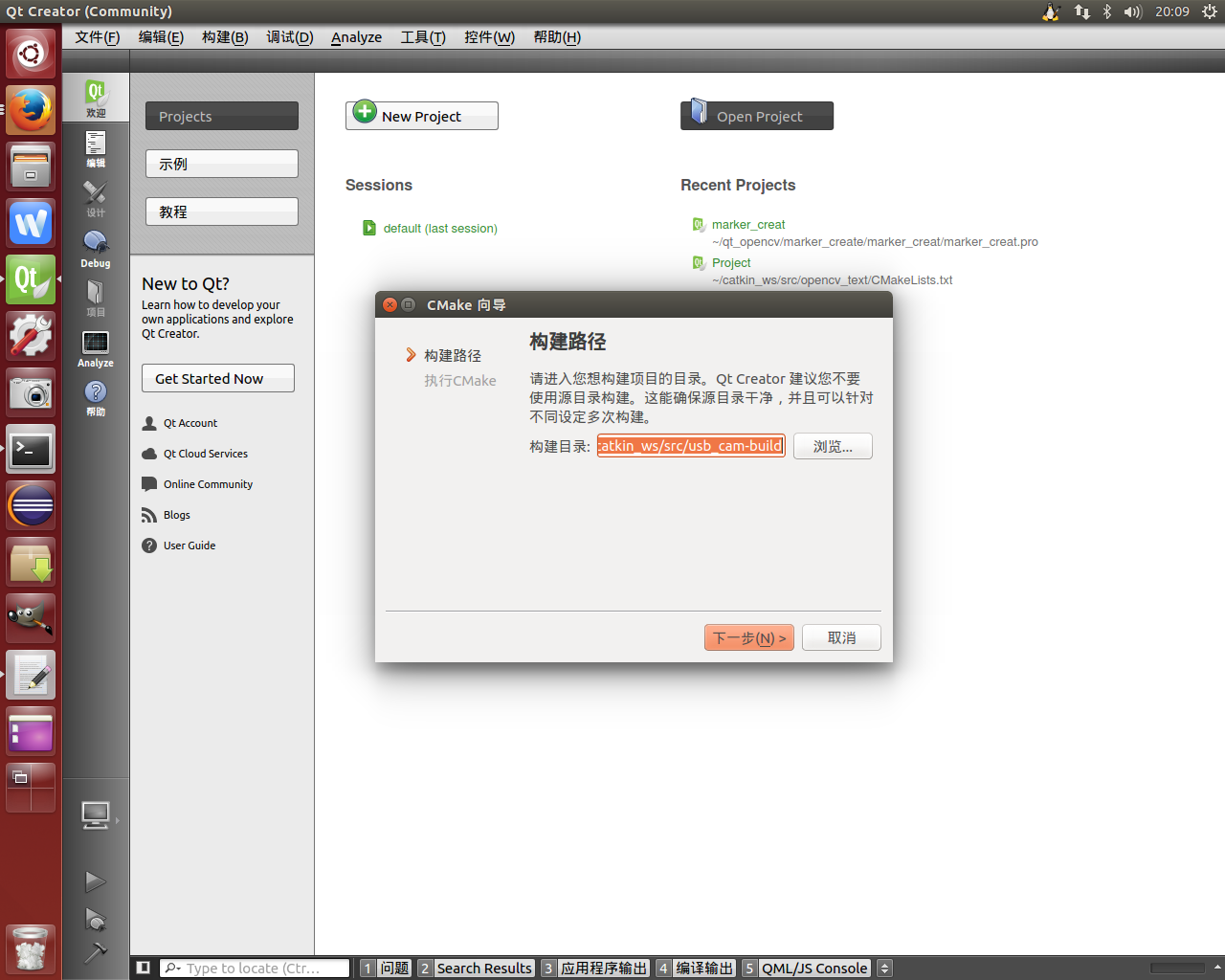
点击打开,然后构建路径,定位到catkin_ws/build这个文件,最后点击下一步,
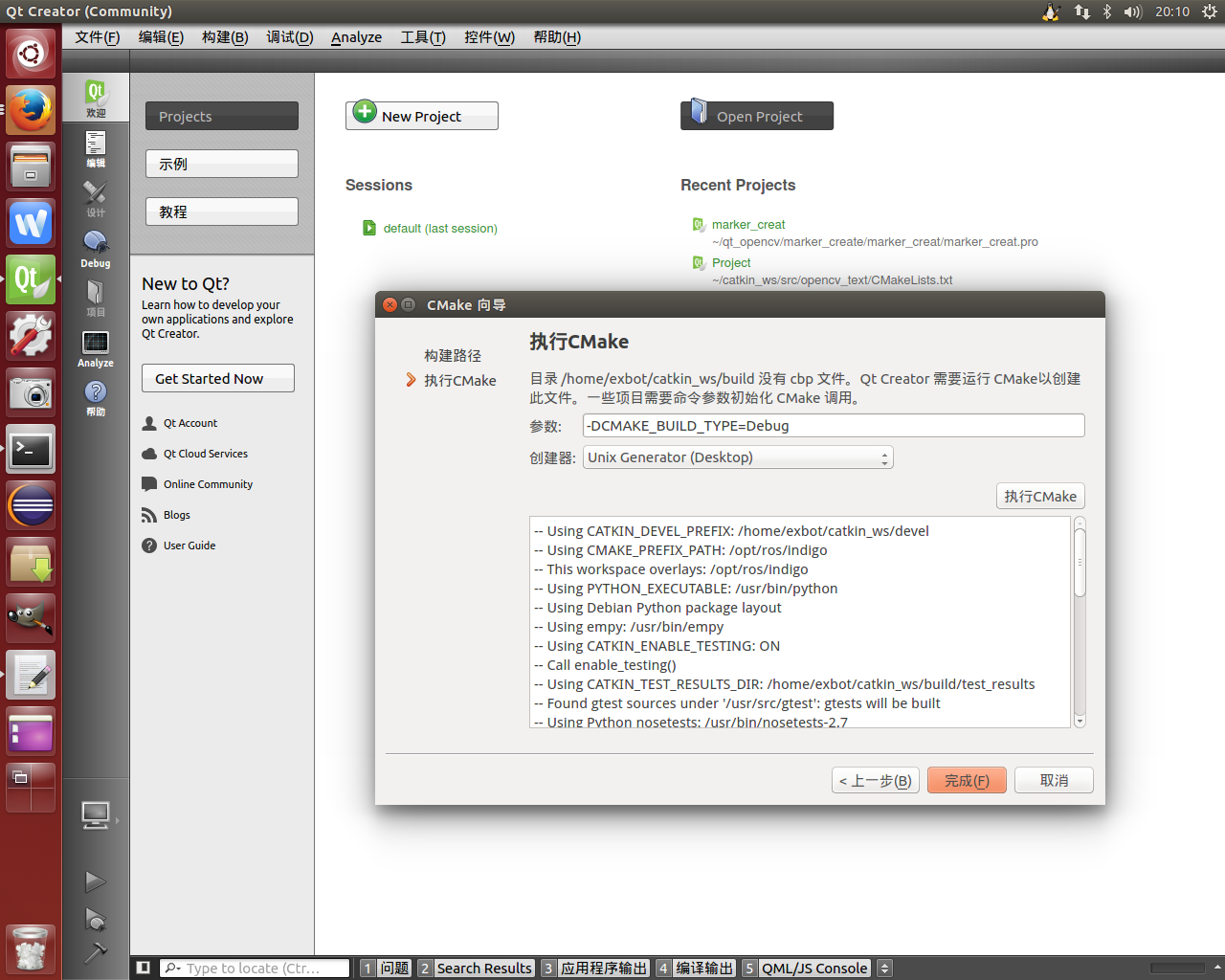
记得在在参数那里加上:-DCMAKE_BUILD_TYPE=Debug
否则你进行不了调试。最后就
ok
最后就可以开心的写代码了,尽量嗨!!!














 1748
1748











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









