







这是一种简单的插值算法:不需要计算,在待求象素的四邻象素中,将距离待求象素最近的邻象素灰度赋给待求象素
设i+u, j+v(i, j为正整数, u, v为大于零小于1的小数,下同)为待求象素坐标,则待求象素灰度的值 f(i+u, j+v)
如下图所示:
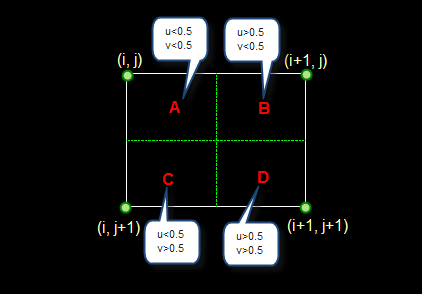
如果(i+u, j+v)落在A区,即u<0.5, v<0.5,则将左上角象素的灰度值赋给待求象素,同理,落在B区则赋予右上角的象素灰度值,落在C区则赋予左下角象素的灰度值,落在D区则赋予右下角象素的灰度值。
最邻近元法计算量较小,但可能会造成插值生成的图像灰度上的不连续,在灰度变化的地方可能出现明显的锯齿状。
下面附上源代码:
#include<opencv2\core\core.hpp>
#include<opencv2\highgui\highgui.hpp>
#include<opencv2\imgproc\imgproc.hpp>
#include<iostream>
using namespace cv;
//最近邻插值
//基于等间隔提取图像的缩放
Mat imageReduction1(Mat &srcImage, float kx, float ky)//原始图形以及缩放比例
{
//获取输出图像分辨率
int nRows = cvRound(srcImage.rows * kx);//cvRound这个函数返回的是和参数最接近的整数
int nCols = cvRound(srcImage.cols * ky);
Mat resultImage(nRows, nCols, srcImage.type());//创建一张输出的图像
for (int i = 0; i < nRows; i++)
{
//根据水平因子计算在原图中的坐标
int x = static_cast<int>((i + 1) / kx + 0.5) - 1;
for (int j = 0; j < nCols; j++)
{
//根据垂直因子计算在原图中的坐标
int y = static_cast<int>((j + 1) / ky + 0.5) - 1;
resultImage.at<Vec3b>(i, j) = srcImage.at<Vec3b>(x, y);
}
}
return resultImage;
}
//基于区域子块提取图像缩放
//求每个区域子块中的像素的通道的平均值
Vec3b areaAverage(Mat &srcImage, Point_<int> leftPoint, Point_<int> rightPoint)
{
int temp1 = 0, temp2 = 0, temp3 = 0;//用来保存区域块中的每个通道像素的和
//计算区域块中的像素点的个数
int nPix = (rightPoint.x - leftPoint.x + 1)*(rightPoint.y - leftPoint.y + 1);
//计算区域子块中的各个通道的像素和
for (int i = leftPoint.x; i <= rightPoint.x; i++)
{
for (int j = leftPoint.y; j <= rightPoint.y; j++)
{
temp1 += srcImage.at<Vec3b>(i, j)[0];//求和区域块中的蓝绿红通道的像素和
temp2 += srcImage.at<Vec3b>(i, j)[1];
temp3 += srcImage.at<Vec3b>(i, j)[2];
}
}
//对区域块中的每个通道求平均值
Vec3b vecTemp;
vecTemp[0] = temp1 / nPix;
vecTemp[1] = temp2 / nPix;
vecTemp[2] = temp3 / nPix;
return vecTemp;
}
Mat imageReduction2(Mat &srcImage, float kx, float ky)
{
//获取输出图像分辨率
int nRows = cvRound(srcImage.rows * kx);//cvRound这个函数返回的是和参数最接近的整数
int nCols = cvRound(srcImage.cols * ky);
Mat resultImage(nRows, nCols, srcImage.type());//创建一张输出的图像
//区域子块的左上角行列坐标
int leftRowcoordinate = 0;
int leftColcoordinate = 0;
for (int i = 0; i < nRows; i++)
{
//根据水平因子计算在原图中的坐标
int x = static_cast<int>((i + 1) / kx + 0.5) - 1;
for (int j = 0; j < nCols; j++)
{
//根据垂直因子计算在原图中的坐标
int y = static_cast<int>((j + 1) / ky + 0.5) - 1;
//求区域子块的均值
resultImage.at<Vec3b>(i, j) = areaAverage(srcImage, Point_<int>(leftRowcoordinate, leftColcoordinate), Point_<int>(x, y));
//更新下子块左上角的列坐标,行坐标不变
leftColcoordinate = y + 1;
}
//一列循环完毕重新将列坐标置零
leftColcoordinate = 0;
//更新下子块左上角的行坐标
leftRowcoordinate = x + 1;
}
return resultImage;
}
int main()
{
Mat srcIamge = imread("lakeWater.jpg");
if (!srcIamge.data)
{
printf("image could not load...\n");
return -1;
}
imshow("srcIamge", srcIamge);
Mat resultImage1 = imageReduction1(srcIamge, 0.5, 0.5);
imshow("res1", resultImage1);
Mat resultImage2 = imageReduction2(srcIamge, 0.5, 0.5);
imshow("res2", resultImage2);
waitKey(0);
return 0;
}原图:
效果图:















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









