







前言:
在玩3D游戏中,我们对于整个游戏场景的视野获取就是通过摄像机来完成的。由此可见摄像机的重要性。前面的所有例子都是针对于摄像机固定来说的。这一次我们来设计一个摄像机(模拟游戏场景中的摄像机)。
取景变换计算过程:
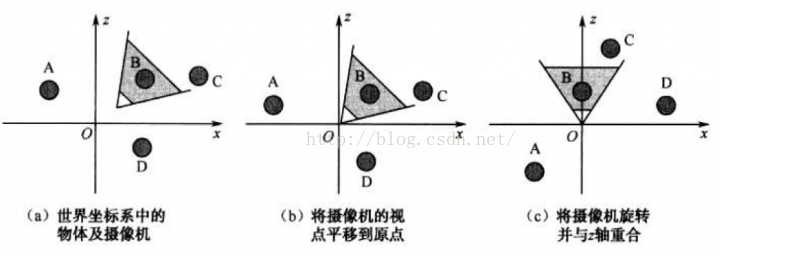
在前面我们讲过取景变换。在当摄像机的位置和朝向任意时,进行一些操作会造成效率低下很是麻烦。为了简化运算,我们将摄像机变换到世界坐标系的原点,并旋转摄像机使其光轴与世界坐标系的z轴正方向朝向一致。要特别注意的是,世界中的所有物体都会随之摄像机变换,以保证摄像机的视场恒定。
如下图:
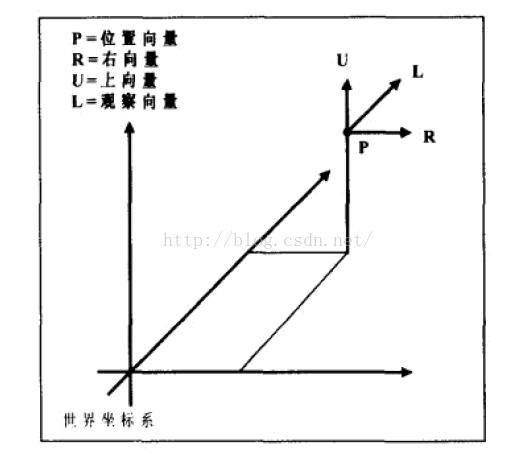
由此可见,我们要描述一个摄像机必须有四个向量:右向量(right)、上向量(up)、观察向量(look)、位置向量(position)。实际上,这些向量的定义意味着我们定义了一个局部的坐标系。
这样,我们就可以通过这四个向量来进行以下变换:
绕向量right的旋转
绕向量up的旋转
绕向量look的旋转
沿向量right方向的扫视
沿向量up的升降
沿向量look的平动
如下图所示:
那么,我们怎么才能实现这些变换呢?答案:通过矩阵运算!!
为了讲解方便,我们令向量
p = (px,py,pz)表示位置向量,position
r = (rx,ry,rz) 向量表示右向量, right
u = (ux,uy,uz) 向量表示上向量,up
<
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 3300
3300











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









