







A星寻路原理:
略,网上可搜到
只简单说下F,G,H值
G:从起点A到当前点B的所耗费的移动距离。
H:此点到终点的移动距离(忽视障碍)。
F:F=G+H,用来寻找最优解。
通过理解A星寻路的原理可以设计出以下流程图:
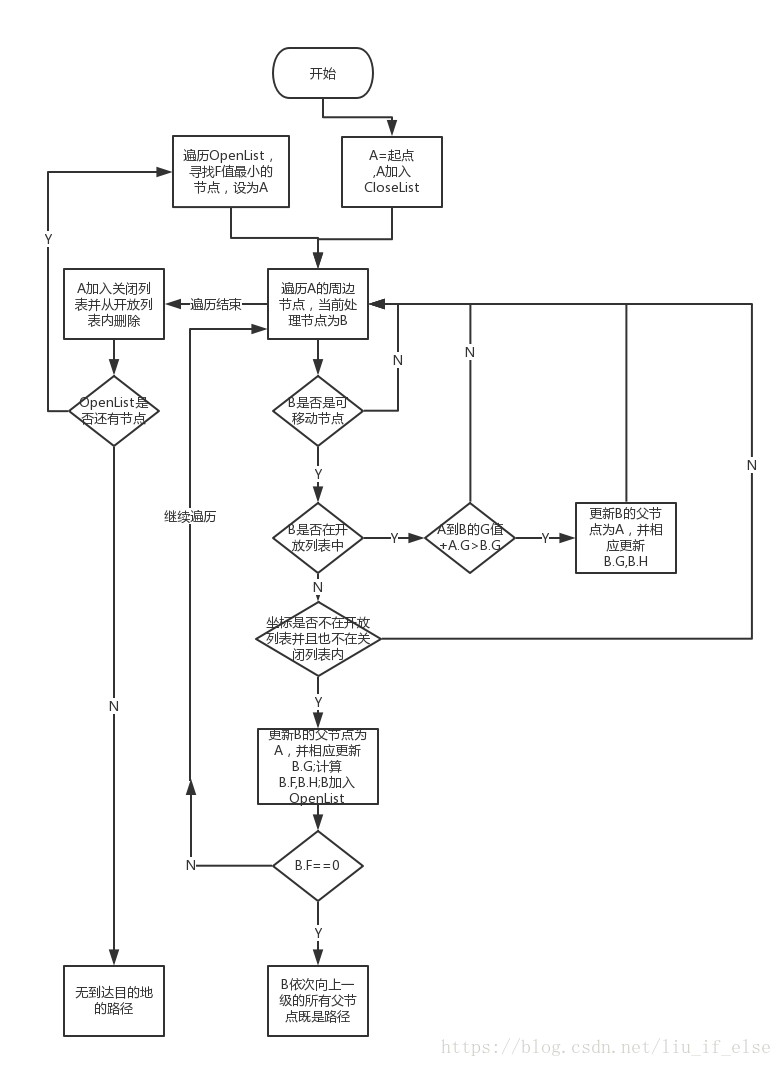
Unity C#脚本实现流程图的代码:
此脚本挂在场景中任意空物体上即可实现效果,在Start()内可调整地图相关参数
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
public class AStar : MonoBehaviour {
//地图节点类型
public enum NodeType
{
moveable, //可移动
bar, //障碍物
boundary, //边界
aStarPath //A星路径
}
//A星状态
public enum AStarState
{
free,
isInOpenList,
isInCloseList
}
//pos<-->node 字典
private Dictionary<Vector2, Node> PosNodeDict;
//地图节点
public class Node
{
public Vector2 pos;
public NodeType nodeType;
public AStarState aStarState;
public Node[] neighbourNodes;
public Node parentNode=null;
public float F=0;
public float G=0;
public float H = 0;
}
//地图初始化
public Node[,] InitMap(int mapHeight,int mapLength)
{
Node[,] nodes = new Node[mapHeight, mapLength];
PosNodeDict = new Dictionary<Vector2, Node>();
for (int i = 0; i < mapHeight; i++)
{
for (int j = 0; j < mapLength; j++)
{
nodes[i, j] = new Node();
//边界判断
if (i == 0)
{
nodes[i, j].nodeType = NodeType.boundary;
nodes[i, j].pos = new Vector2(j, i);
}
else if (j == 0)
{
nodes[i, j].nodeType = NodeType.boundary;
nodes[i, j].pos = new Vector2(j, i);
}
else if (i == mapHeight - 1)
{
nodes[i, j].nodeType = NodeType.boundary;
nodes[i, j].pos = new Vector2(j, i);
}
else if (j == mapLength - 1)
{
nodes[i, j].nodeType = NodeType.boundary;
nodes[i, j].pos = new Vector2(j, i);
}
else
{
nodes[i, j].nodeType = NodeType.moveable;
nodes[i, j].pos = new Vector2(j, i);
}
//节点加入 坐标<-->节点 字典
nodes[i, j].aStarState = AStarState.free;
PosNodeDict.Add(new Vector2(j, i), nodes[i, j]);
}
}
//初始化相邻坐标节点数组
for (int i=0; i < mapHeight; i++)
{
for(int j=0; j < mapLength; j++)
{
nodes[i, j].neighbourNodes = new Node[8];
Vector2 curNeighbVec2;
//上
curNeighbVec2 = new Vector2(j, i + 1);
if (PosNodeDict.ContainsKey(curNeighbVec2))
{
nodes[i, j].neighbourNodes[0] = PosNodeDict[curNeighbVec2];
}
//下
curNeighbVec2 = new Vector2(j, i - 1);
if (PosNodeDict.ContainsKey(curNeighbVec2))
{
nodes[i, j].neighbourNodes[1] = PosNodeDict[curNeighbVec2];
}
//左
curNeighbVec2 = new Vector2(j - 1, i);
if (PosNodeDict.ContainsKey(curNeighbVec2))
{
nodes[i, j].neighbourNodes[2] = PosNodeDict[curNeighbVec2];
}
//右
curNeighbVec2 = new Vector2(j + 1, i);
if (PosNodeDict.ContainsKey(curNeighbVec2))
{
nodes[i, j].neighbourNodes[3] = PosNodeDict[curNeighbVec2];
}
//左上
curNeighbVec2 = new Vector2(j - 1, i + 1);
if (PosNodeDict.ContainsKey(curNeighbVec2))
{
nodes[i, j].neighbourNodes[4] = PosNodeDict[curNeighbVec2];
}
//右上
curNeighbVec2 = new Vector2(j + 1, i + 1);
if (PosNodeDict.ContainsKey(curNeighbVec2))
{
nodes[i, j].neighbourNodes[5] = PosNodeDict[curNeighbVec2];
}
//左下
curNeighbVec2 = new Vector2(j - 1, i - 1);
if (PosNodeDict.ContainsKey(curNeighbVec2))
{
nodes[i, j].neighbourNodes[6] = PosNodeDict[curNeighbVec2];
}
//右下
curNeighbVec2 = new Vector2(j + 1, i - 1);
if (PosNodeDict.ContainsKey(curNeighbVec2))
{
nodes[i, j].neighbourNodes[7] = PosNodeDict[curNeighbVec2];
}
}
}
return nodes;
}
//设置障碍bar
public void AddBar(Vector2 barPos)
{
if (PosNodeDict.ContainsKey(barPos)){
print("bar added");
PosNodeDict[barPos].nodeType = NodeType.bar;
}
}
//地图具象化
public void InstantiateMap(Node[,] nodes)
{
for(int i = 0; i < nodes.GetLength(0); i++)
{
for (int j = 0; j < nodes.GetLength(1); j++)
{
GameObject curCube = GameObject.CreatePrimitive(PrimitiveType.Cube);
curCube.transform.position = new Vector3(j, i, 0);
if (nodes[i, j].nodeType == NodeType.boundary)
{
print("set boundary");
curCube.GetComponent<Renderer>().material.SetColor("_Color", Color.black);
}
else if (nodes[i, j].nodeType == NodeType.bar)
{
print("set bar");
curCube.GetComponent<Renderer>().material.SetColor("_Color", Color.red);
}
else if (nodes[i, j].nodeType == NodeType.aStarPath)
{
print("set path");
curCube.GetComponent<Renderer>().material.SetColor("_Color", Color.yellow);
}
}
}
}
//地图具象化(并对Openlist,Closelist内节点上色)
public void InstantiateMapBeta(Node[,] nodes){
for (int i = 0; i < nodes.GetLength(0); i++)
{
for (int j = 0; j < nodes.GetLength(1); j++)
{
GameObject curCube = GameObject.CreatePrimitive(PrimitiveType.Cube);
curCube.transform.position = new Vector3(j, i, 0);
if (nodes[i, j].nodeType == NodeType.boundary)
{
print("set boundary");
curCube.GetComponent<Renderer>().material.SetColor("_Color", Color.black);
}
else if (nodes[i, j].nodeType == NodeType.bar)
{
print("set bar");
curCube.GetComponent<Renderer>().material.SetColor("_Color", Color.red);
}
else if (nodes[i, j].nodeType == NodeType.aStarPath)
{
print("set path");
curCube.GetComponent<Renderer>().material.SetColor("_Color", Color.yellow);
}
else if(OpenList.Contains(nodes[i,j]))
{
curCube.GetComponent<Renderer>().material.SetColor("_Color", Color.green);
}
else if(CloseList.Contains(nodes[i,j]))
{
curCube.GetComponent<Renderer>().material.SetColor("_Color", Color.blue);
}
}
}
}
//寻路相关
private List<Node> OpenList;
private List<Node> CloseList;
private Vector2 globalEndPos;
//寻路入口
public bool PathSearch(Node[,] nodes,Vector2 startPos,Vector2 endPos)
{
//校验参数
if (!PosNodeDict.ContainsKey(startPos) || !(PosNodeDict.ContainsKey(endPos)))
{
print("invalid para");
return false;
}
if(PosNodeDict[startPos].nodeType != NodeType.moveable||PosNodeDict[endPos].nodeType!=NodeType.moveable){
print("invalid para");
return false;
}
OpenList = new List<Node>();
CloseList = new List<Node>();
globalEndPos = endPos;
//算法开始
//起点为A
//这里有点不直观,startPos的xy要倒过来引用nodes。感谢tuyou67评论指出。
Node A = nodes[(int)startPos.y, (int)startPos.x];
A.G = 0;
A.H = Mathf.Abs(globalEndPos.x - A.pos.x) + Mathf.Abs(globalEndPos.y - A.pos.y); //Vector2.Distance(A.pos, globalEndPos);
A.F = A.G + A.H;
A.parentNode = null;
CloseList.Add(A);
A.aStarState = AStarState.isInCloseList;
do
{
//遍历OpenList,寻找F值最小的节点,设为A
if (OpenList.Count > 0)
{
A = OpenList[0];
}
for (int i = 0; i < OpenList.Count; i++)
{
if (OpenList[i].F < A.F)
{
A = OpenList[i];
}
}
Node path = AStarSearch(A);
if (path != null)
{
print("path found");
do
{
path.nodeType = NodeType.aStarPath;
if (path.parentNode == null)
{
path = null;
}
else
{
path = path.parentNode;
}
} while (path!= null);
return true;
}
OpenList.Remove(A);
CloseList.Add(A);
A.aStarState = AStarState.isInCloseList;
//OpenList是否还有节点
} while (OpenList.Count > 0);
//无到达目的地的路径
print("path not found");
return false;
}
public Node AStarSearch(Node A)
{
//遍历A的周边节点,当前处理节点为B
Node B;
for (int i = 0; i < A.neighbourNodes.Length; i++)
{
if (A.neighbourNodes[i] == null)
{
continue;
}
B = A.neighbourNodes[i];
//是否是可移动节点
if (B.nodeType != NodeType.moveable)
{
continue;
}
//是否在开放列表中
if (B.aStarState == AStarState.isInOpenList)
{
//A到B的G值+A.G>B.G
float curG = Vector2.Distance(A.pos, B.pos);
if (B.G > curG + A.G)
{
//更新B的父节点为A,并相应更新B.G,B.H
B.parentNode = A;
B.G = curG + A.G;
B.F = B.G + B.H;
}
continue;
}
else if(B.aStarState==AStarState.free)
{
//更新B的父节点为A,并相应更新B.G; 计算B.F,B.H; B加入OpenList
B.parentNode = A;
B.G = Vector2.Distance(A.pos,B.pos)+A.G;
B.H = Mathf.Abs(globalEndPos.x - B.pos.x) + Mathf.Abs(globalEndPos.y - B.pos.y); //Vector2.Distance(B.pos, globalEndPos);
B.F = B.G + B.H;
OpenList.Add(B);
B.aStarState = AStarState.isInOpenList;
//B.F==0
if (B.H <Mathf.Epsilon)
{
//B的所有父节点既是路径
return B;
}
else
{
//继续遍历
continue;
}
}
else
{
continue;
}
}
return null;
}
//程序入口
// Use this for initialization
void Start () {
Node[,] nodes = InitMap(100, 100);
AddBar(new Vector2(2, 2));
AddBar(new Vector2(2, 3));
AddBar(new Vector2(3, 2));
AddBar(new Vector2(3, 3));
AddBar(new Vector2(4, 4));
AddBar(new Vector2(3, 4));
AddBar(new Vector2(4, 3));
AddBar(new Vector2(4, 5));
AddBar(new Vector2(5, 4));
AddBar(new Vector2(4, 6));
AddBar(new Vector2(4, 7));
AddBar(new Vector2(1, 7));
AddBar(new Vector2(2, 7));
AddBar(new Vector2(3, 7));
PathSearch(nodes, new Vector2(1, 3), new Vector2(2,12));
InstantiateMapBeta(nodes);
}
}
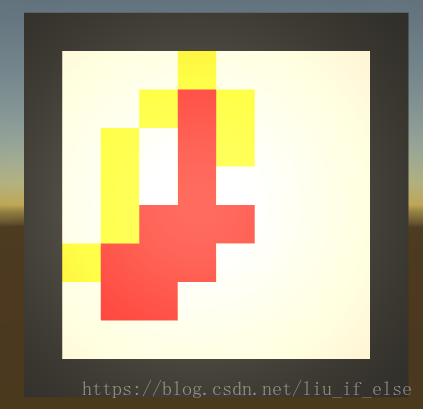
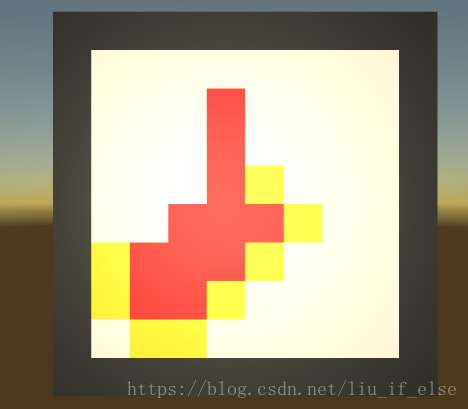
效果图:
红色方块为障碍物,黑色方块为边界,灰色方块为空地,绿色方块为OpenList内节点,蓝色方块为CloseList内节点,黄色方块为路径。
————————————————————————————————
维护日志:
2017-8-31:更改标题,文章分类。
2018-8-2:Review,重写了代码,流程图,并更新了效果图。
2020-5-28:修改了startPos引用nodes的bug















 1161
1161











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









