






http://www.opencv.org.cn/opencvdoc/2.3.2/html/doc/user_guide/ug_mat.html
操作图像¶
输入/输出
图像
从文件中读入一副图像:
如果你读入一个jpg文件,缺省情况下将创建一个3通道图像。如果你需要灰度(单通道)图像,使用如下语句:
将图像保存到一个文件:
基本图像操作
获取像素的亮度值
要获取像素的亮度值,你必须知道图像的类型和通道的数目。如下例子展示了获取单通道灰度图(类型 8UC1)的(x, y)位置处的像素值:
intensity.val[0] 中保存从0到255的值。现在我们看一下3通道图像如何获取像素值,颜色顺序为 BGR ( imread 返回的缺省顺序):
你可以使用同样的方法处理浮点图像(例如通对一个3通道图像进行Sobel运算得到的浮点图像):
同样的方法也可用于像素值的修改:
一些OpenCV函数,例如calib3d模块中的 projectPoints 函数,需要以 Mat 的格式输入二维或者三维的点。这样的矩阵必须有且仅有一列,这样每行对应一个点,矩阵类型需要是32FC2或者32FC3。这样的矩阵可以很容易的从std::vector 转换而来:
您也可以通过 Mat::at 方法来读写矩阵中的一个元素:
底层操作
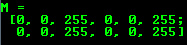
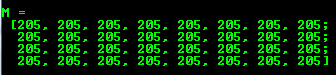
为矩阵定义了一系列方便的操作符。我们可以将一个已经存在的灰度图像 img 变成全黑色:
选择感兴趣区域:
将 Mat 转为 C API 数据类型:
注意此处无数据复制操作。
将彩色图像转为灰度图像:
将图像的类型从8UC1转为32FC1:
显示图像¶
在算法开发过程中,查看算法的中间结果是非常有用的。OpenCV提供了方便查看图像的方法。类型为 8U 的图像可以使用如下方法显示:
调用 waitKey() 会进入一个消息循环,来等待 image 窗口上的按键动作。 类型为 32F 的图像需要转为 8U 类型。如下:
基本上讲 Mat 是一个类,由两个数据部分组成:矩阵头(包含矩阵尺寸,存储方法,存储地址等信息)和一个指向存储所有像素值的矩阵(根据所选存储方法的不同矩阵可以是不同的维数)的指针。矩阵头的尺寸是常数值,但矩阵本身的尺寸会依图像的不同而不同,通常比矩阵头的尺寸大数个数量级。因此,当在程序中传递图像并创建拷贝时,大的开销是由矩阵造成的,而不是信息头。OpenCV是一个图像处理库,囊括了大量的图像处理函数,为了解决问题通常要使用库中的多个函数,因此在函数中传递图像是家常便饭。同时不要忘了我们正在讨论的是计算量很大的图像处理算法,因此,除非万不得已,我们不应该拷贝 大 的图像,因为这会降低程序速度。
为了搞定这个问题,OpenCV使用引用计数机制。其思路是让每个 Mat 对象有自己的信息头,但共享同一个矩阵。这通过让矩阵指针指向同一地址而实现。而拷贝构造函数则 只拷贝信息头和矩阵指针 ,而不拷贝矩阵。
|
|
|
以上代码中的所有Mat对象最终都指向同一个也是唯一一个数据矩阵。虽然它们的信息头不同,但通过任何一个对象所做的改变也会影响其它对象。实际上,不同的对象只是访问相同数据的不同途径而已。这里还要提及一个比较棒的功能:你可以创建只引用部分数据的信息头。比如想要创建一个感兴趣区域( ROI ),你只需要创建包含边界信息的信息头:
|
|
|
现在你也许会问,如果矩阵属于多个 Mat 对象,那么当不再需要它时谁来负责清理?简单的回答是:最后一个使用它的对象。通过引用计数机制来实现。无论什么时候有人拷贝了一个 Mat 对象的信息头,都会增加矩阵的引用次数;反之当一个头被释放之后,这个计数被减一;当计数值为零,矩阵会被清理。但某些时候你仍会想拷贝矩阵本身(不只是信息头和矩阵指针),这时可以使用函数 clone() 或者 copyTo() 。
|
|
|
现在改变 F 或者 G 就不会影响 Mat 信息头所指向的矩阵。总结一下,你需要记住的是
显式地创建一个 Mat 对象
教程 读取、修改、保存图像 已经讲解了如何使用函数 imwrite() 将一个矩阵写入图像文件中。但是为了debug,更加方便的方式是看实际值。为此,你可以通过 Mat 的运算符 << 来实现,但要记住这只对二维矩阵有效。
Mat 不但是一个很赞的图像容器类,它同时也是一个通用的矩阵类,所以可以用来创建和操作多维矩阵。创建一个Mat对象有多种方法:
-
Mat() 构造函数
对于二维多通道图像,首先要定义其尺寸,即行数和列数。
然后,需要指定存储元素的数据类型以及每个矩阵点的通道数。为此,依据下面的规则有多种定义
比如 CV_8UC3 表示使用8位的 unsigned char 型,每个像素由三个元素组成三通道。预先定义的通道数可以多达四个。 Scalar 是个short型vector。指定这个能够使用指定的定制化值来初始化矩阵。当然,如果你需要更多通道数,你可以使用大写的宏并把通道数放在小括号中,如下所示
-
在 C\C++ 中通过构造函数进行初始化
上面的例子演示了如何创建一个超过两维的矩阵:指定维数,然后传递一个指向一个数组的指针,这个数组包含每个维度的尺寸;其余的相同
-
为已存在IplImage指针创建信息头:
-
Create() function: 函数
这个创建方法不能为矩阵设初值,它只是在改变尺寸时重新为矩阵数据开辟内存。
-
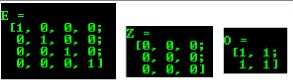
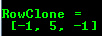
对于小矩阵你可以用逗号分隔的初始化函数:















 2279
2279











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









