







/*
基于深度优先遍历算法的应用。
假设图G采用邻接矩阵存储:
(1)判断图G中从顶点u到v是否存在简单路径;
(2)输出图G中从顶点u到v的一条简单路径(假设至少存在一条路径);
(3)输出从图G中从顶点u到v的所有简单路径(假设至少存在一条路径);
(4)输出从图G中从顶点u到v的长度为s的所有简单路径;
(5)求图中通过某顶点k的所有简单回路(若存在)。
*/
#include <iostream>
#include <stdio.h>
#include <malloc.h>
#define MAXV 50
using namespace std;
int visited[MAXV];
//邻接表类型
typedef struct ANode
{
int adjvex; //该边的编号
struct ANode *nextarc; //指向下一条边的信息
} ArcNode; //边节点的类型
typedef struct Vnode
{
ArcNode *firstarc; //指向第一条边
} VNode; //邻接表头节点类型
typedef VNode AdjList[MAXV];
typedef struct
{
AdjList adjlist; //邻接表
int n,e; //图中顶点数n和边数e
} ALGraph; //完整的图邻接表类型
void ArrayToList(int *Arr, int n, ALGraph *&G) //用普通数组构造图的邻接表
{
int i,j,count=0; //count用于统计边数,即矩阵中非0元素个数
ArcNode *p;
G=(ALGraph *)malloc(sizeof(ALGraph));
G->n=n;
for (i=0; i<n; i++) //给邻接表中所有头节点的指针域置初值
G->adjlist[i].firstarc=NULL;
for (i=0; i<n; i++) //检查邻接矩阵中每个元素
for (j=n-1; j>=0; j--)
if (Arr[i*n+j]!=0) //存在一条边,将Arr看作n×n的二维数组,Arr[i*n+j]即是Arr[i][j]
{
p=(ArcNode *)malloc(sizeof(ArcNode)); //创建一个节点*p
p->adjvex=j;
p->nextarc=G->adjlist[i].firstarc; //采用头插法插入*p
G->adjlist[i].firstarc=p;
}
G->e=count;
}
void DispAdj(ALGraph *G) //输出邻接表G
{
int i;
ArcNode *p;
for (i=0; i<G->n; i++)
{
p=G->adjlist[i].firstarc;
printf("%3d: ",i);
while (p!=NULL)
{
printf("-->%d ",p->adjvex);
p=p->nextarc;
}
printf("\n");
}
}
/*
判断图G中从顶点u到v是否存在简单路径:
在深度优先遍历的基础上增加has和v两个形参,其中has表示顶点u到v是否有路径,其初值为false,
当顶点u遍历到顶点v后,置has为true并返回。
*/
void ExistPath(ALGraph *G,int u,int v,bool &has)
{
int w;
ArcNode *p;
visited[u]=1; //置初始顶点为已访问标记
if(u==v) //找到一条路径
{
has=true;
return ;
}
p=G->adjlist[u].firstarc; //p指向顶点u的第一个邻接点
while(p!=NULL)
{
w=p->adjvex; //w为u的相邻顶点
if(visited[w]==0)
ExistPath(G,w,v,has);
p=p->nextarc; //p指向顶点u的下一个相邻点
}
}
/*
输出图G中从顶点u到v的一条简单路径:
在深度优先遍历的基础上增加v、path和d三个形参,其中path存放顶点u到v的路径,d表示path中的路径长度,初值为-1
当顶点u遍历到顶点v后,输出path并返回。
*/
void FindaPath(ALGraph *G,int u,int v,int path[],int d)
{
int w,i;
ArcNode *p;
visited[u]=1; //置初始顶点为已访问标记
d++;
path[d]=u; //路径长度d增1,顶点u加入到路径中
if(u==v) //找到一条路径,输出并返回
{
cout<<"输出从u到v的一条简单路径:";
for(i=0; i<=d; i++)
cout<<path[i];
cout<<endl;
return;
}
p=G->adjlist[u].firstarc; //p指向顶点u的第一个邻接点
while(p!=NULL)
{
w=p->adjvex; //w为u的相邻顶点
if(visited[w]==0)
FindaPath(G,w,v,path,d);
p=p->nextarc; //p指向顶点u的下一个相邻点
}
}
/*
输出从图G中从顶点u到v的所有简单路径:
在深度优先遍历的基础上增加v、path和d三个形参,其中path存放顶点u到v的路径,d表示path中的路径长度,初值为-1
当从顶点u出发遍历时,先将visited[u]置为1,并将u加入到路径path中,若满足顶点u就是终点的v的条件时,
则找到了一个从顶点u到v的一条路径,则输出path并继续;再从顶点u找一个未访问过的相邻顶点w,若存在这样的顶点w,
则从w出发继续进行,若不存在这样的顶点w,则说明从顶点u再往下找找不到路径,所以置visited[u]为0,以便顶点u作为
其他路径上的顶点。
*/
void FindPath(ALGraph *G,int u,int v,int path[],int d)
{
int w,i;
ArcNode *p;
d++;
path[d]=u; //路径长度d增1,顶点u加入到路径中
visited[u]=1; //置初始顶点为已访问标记
if(u==v&&d>=1) //找到一条路径则输出
{
for(i=0; i<=d; i++)
cout<<path[i];
cout<<endl;
}
p=G->adjlist[u].firstarc; //p指向顶点u的第一个邻接点
while(p!=NULL)
{
w=p->adjvex; //w为u的相邻顶点
if(visited[w]==0)
FindPath(G,w,v,path,d);
p=p->nextarc; //p指向顶点u的下一个相邻点
}
visited[u]=0; //恢复环境,使该顶点可重新使用
}
/*
输出从图G中从顶点u到v的长度为s的所有简单路径;
只需将路径输出条件改为u==v且d==s。
*/
void PathAll(ALGraph *G,int u,int v,int s,int path[],int d)
{
int w,i;
ArcNode *p;
visited[u]=1;
d++;
path[d]=u; //路径长度d增1,顶点u加入到路径中
if(u==v&&d==s) //找到一条路径则输出
{
for(i=0; i<=d; i++)
cout<<path[i];
cout<<endl;
}
p=G->adjlist[u].firstarc; //p指向顶点u的第一个邻接点
while(p!=NULL)
{
w=p->adjvex; //w为u的相邻顶点
if(visited[w]==0)
PathAll(G,w,v,s,path,d);
p=p->nextarc; //p指向顶点u的下一个相邻点
}
visited[u]=0; //恢复环境,使该顶点可重新使用
}
/*
求图中通过某顶点k的所有简单回路(若存在):
利用深度优先搜索方法,从顶点u开始搜索与之相邻的顶点w,若w等于顶点v(其初值为u),且路径长度大于0,表示找到了一条回路,
输出path数组,然后继续搜索顶点u的未访问的相邻点查找其它通路。
*/
void DFSPath(ALGraph *G,int u,int v,int path[],int d)
{
int w,i;
ArcNode *p;
visited[u]=1;
d++;
path[d]=u; //路径长度d增1,顶点u加入到路径中
p=G->adjlist[u].firstarc; //p指向顶点u的第一个邻接点
while(p!=NULL)
{
w=p->adjvex; //w为顶点u的相邻点
if(w==v&&d>0) //找到一条路径则输出
{
for(i=0; i<=d; i++)
cout<<path[i];
cout<<v<<endl;
}
if(visited[w]==0) //若w未访问,则递归访问之
DFSPath(G,w,v,path,d);
p=p->nextarc; //p指向顶点u的下一个相邻点
}
visited[u]=0; //恢复环境,使该顶点可重新使用
}
int main()
{
int i,path[MAXV];
bool f;
ALGraph *G,*G1,*G2;
int A[5][5]=
{
{0,1,1,0,0},
{0,0,1,0,0},
{0,0,0,1,1},
{0,0,0,0,1},
{1,0,0,0,0}
};
int B[5][5]=
{
{0,1,0,1,1},
{1,0,1,1,0},
{0,1,0,1,1},
{1,1,1,0,1},
{1,0,1,1,0}
};
int C[5][5]=
{
{0,1,1,0,0},
{0,0,1,0,0},
{0,0,0,1,1},
{0,0,0,0,1},
{1,0,0,0,0}
};
ArrayToList(A[0], 5, G);
ArrayToList(B[0], 5, G1);
ArrayToList(C[0], 5, G2);
for (i=0; i<G->n; i++)
visited[i]=0; //访问标志数组初始化
printf("有向图G的邻接表:\n");
DispAdj(G);
cout<<endl;
for (i=0; i<G->n; i++)
visited[i]=0; //访问标志数组初始化
ExistPath(G,1,4,f);
cout<<"是否存在一条u到v的路径?";
if(f)
cout<<"存在"<<endl;
else
cout<<"不存在"<<endl;
for (i=0; i<G->n; i++)
visited[i]=0; //访问标志数组初始化
cout<<endl;
FindaPath(G,1,4,path,-1);
cout<<endl;
for (i=0; i<G1->n; i++)
visited[i]=0; //访问标志数组初始化
printf("无向图G1的邻接表:\n");
DispAdj(G1);
cout<<endl;
for (i=0; i<G1->n; i++)
visited[i]=0; //访问标志数组初始化
printf("输出G1从1到4的所有简单路径:\n");
FindPath(G1,1,4,path,-1);
cout<<endl;
for (i=0; i<G1->n; i++)
visited[i]=0; //访问标志数组初始化
cout<<"输出从图G中从顶点u到v的长度为s的所有简单路径:\n";
PathAll(G1,1,4,3,path,-1);
cout<<endl;
for (i=0; i<G1->n; i++)
visited[i]=0; //访问标志数组初始化
printf("有向图G2的邻接表:\n");
DispAdj(G2);
cout<<endl;
for (i=0; i<G1->n; i++)
visited[i]=0; //访问标志数组初始化
cout<<"经过顶点k的所有回路:\n";
DFSPath(G2,0,0,path,-1);
cout<<endl;
return 0;
}
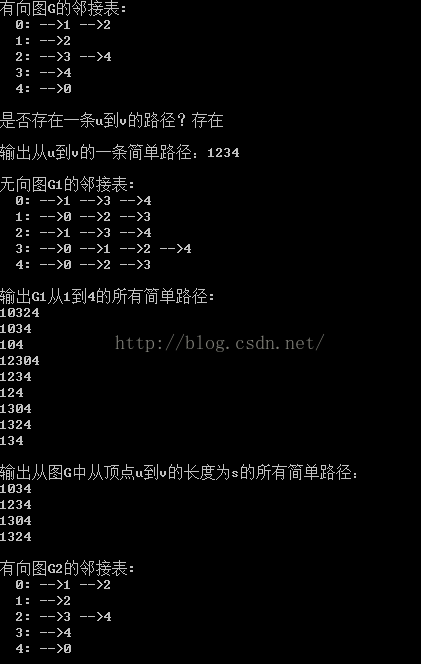
运行结果:















 1030
1030











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









